一种基于腰椎统计形状模型的椎间融合器仿生设计方法
1.本发明专利属于仿生植入器械设计领域,具体涉及到一种基于腰椎统计形状模型的椎间融合器仿生设计方法。
背景技术:
2.下腰痛是常见的一种腰椎疾病,一般是由腰椎退行性改变以及特定的职业习惯引起腰椎解剖结构和力学特性改变而致。
3.椎间融合术是目前治疗下腰痛最普遍、最有效的方式,椎间融合术中采用椎间融合器进行椎骨融合来维持腰椎稳定性,减轻下腰痛患者的疼痛感,在支持骨生长、保持正常的腰椎生理高度有着重要作用。
4.文献调研表明,目前对椎间融合器的开发多集中于通过调整椎间融合器的孔隙率和材料,减少椎间融合器在植入后的下沉量,从而实现更好的融合效果。
5.临床上椎间融合器的选择一般是由经验丰富的骨科医生根据患者的医学图像从商用有限几个系列的椎间融合器中选择较为合适尺寸的椎间融合器。
6.由于较大的个体差异,目前临床大量使用的椎间融合器的形状并不能很好的与患者椎骨上下终板和椎骨相匹配,致使患者腰椎上下终板受力不均匀,影响融合效果,易导致融合术后出现下沉等问题。
7.近年来,有研究者开始结合3d打印技术进行基于特定患者定制椎间融合器,以满足椎间融合器形状与特定患者的椎骨上下终板贴合,但使用该方法定制椎间融合器步骤较为繁琐,人力和时间成本高,故难以形成大规模的应用。
8.统计形状模型是描述物体形状变化的有效方法,统计形状模型是基于物体大样本时,其形状变化满足高斯分布的原理建立,可以通过平均形状模型与变化模式相结合的方式来描述物体形状的变化规律。
9.统计形状模型的出现,使得能够有效快速地生成大量物体形状模型,便于提取物体形状变化特征,为设计更加满足大范围群体、更符合个体腰椎形状的椎间融合器提供了新的设计思路。
技术实现要素:
10.本发明针对目前椎间融合器设计难以同时满足更大群体需求与符合个体腰椎形状的技术难题,提供一种基于腰椎统计形状模型的椎间融合器仿生设计方法。
11.该方法可以有效地自动化构建腰椎统计形状模型数据库,并基于腰椎统计形状模型数据库进行椎间融合器仿生设计,从而设计出满足更大群体的、更符合个体腰椎形状的仿生椎间融合器。
12.本发明具体技术方案如下:
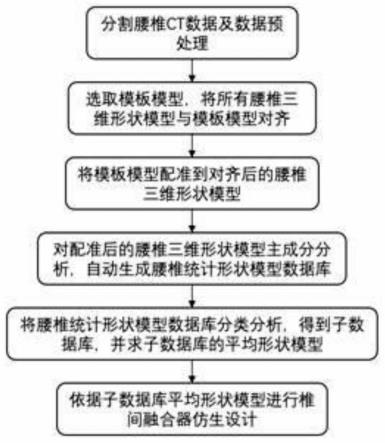
13.如图1所示,一种基于腰椎统计形状模型的椎间融合器仿生设计方法,步骤如下:
14.1)数据预处理:将n个人体腰椎从医学ct数据分割,重建腰椎三维形状模型,输出
stl文件,并对腰椎三维形状模型网格进行网格简化与优化处理,作为腰椎训练集;
15.2)应用相关算法和编写程序,自动化构建腰椎统计形状模型数据库,具体步骤如下:
16.2.01)任意选取训练集中一个腰椎三维形状模型作为模板模型,通过最近点迭代算法,将剩余的腰椎三维形状模型对齐到模板模型;
17.2.02)该算法是通过旋转、平移等变换,使两个点集尽可能重合,减少由于旋转、平移等带来的形状误差;
18.2.03)假定待对齐点集为模板点集为通过计算该目标函数结果是否达到阈值,作为判断是否停止迭代的指标。其中,m、x为点集,为点集中点,t为平移矩阵,r为旋转矩阵,nm为待对齐点集中点的数量;
19.2.04)为了使不同点数的腰椎三维形状模型统一为相同的点数,并建立点与点之间的对应关系,采取非刚性最近点迭代算法将模板模型配准到对齐后的腰椎三维形状模型;
20.2.05)该算法在刚性变换的基础上加入了仿射变换,从而使模板模型变形到待配准腰椎三维形状模型之上,完成配准过程,建立模板模型与待配腰椎三维形状模型点与点之间的对应关系,得到新的腰椎训练集;
21.2.06)将配准后的腰椎训练集进行主成分分析:
22.2.07)计算腰椎训练集平均形状模型:n表示腰椎训练集中腰椎三维形状模型的个数,xi表示腰椎三维形状模型;
23.2.08)计算腰椎训练集的协方差矩阵:
24.2.09)对协方差矩阵求特征向量与特征sφi=λiφi,其中λi表示特征值,φi表示特征向量,特征向量即表示形状变化的主要模式,特征值表示该主成分上方差,特征值越大表示在其对应特征向量方向上保留的数据量越大;
25.2.10)腰椎统计形状模型数据库可表示为t表示对特征值从大到小进行排序,前t个特征值,形状参数bi独立且服从(0,λi)的高斯分布,为控制形状的变化范围,一般取
26.2.11)执行编写的自动化程序,自动生成腰椎统计形状模型数据库;
27.3)对腰椎统计形状模型数据库进行分类分析,形成腰椎统计形状模型子数据库,并对每个子数据库求平均形状模型:
28.3.01)通过镜像法求得腰椎统计形状模型数据库中每个形状模型的正中矢状面;
29.3.02)镜像法中需将腰椎三维形状模型以任意一矢状面进行镜像操作,得到新的模型,新模型与原模型通过最近点迭代算法进行对齐,将对齐后的两个模型作为一个整体,求得其对称面,即正中矢状面;
30.3.03)提取所需腰椎解剖学特征,即在腰椎统计形状模型数据库中每个腰椎三维形状模型的矢状面上进行椎间盘高度与节段前凸角的测量;
31.3.04)以椎间盘高度和节段前凸角大小为标准对腰椎统计形状模型数据库进行分
类分析,将不同椎间盘高度以及不同节段前凸角的腰椎三维形状模型分类;
32.3.05)经过分类后,形成多个子数据库,并对子数据库求平均形状模型即作为仿生设计的腰椎三维形状模型,j为每个子数据库中腰椎三维形状模型的个数,xi表示子数据库中腰椎三维形状模型;
33.4)依据每个子数据库的平均形状模型进行椎间融合器仿生设计:
34.4.01)提取设计所需设计面,提取每个子数据库平均形状模型的相邻两个椎骨的上终板面与下终板面;
35.4.02)依据提取的设计面,进行仿生设计,从而形成一系列的具有仿生形状的椎间融合器。
36.本发明主要包括四个过程:医学ct数据分割及预处理、自动化构建腰椎统计形状模型数据库、对统计形状模型数据库进行分类分析、椎间融合器的仿生设计。
37.本发明首先对采集到的医学ct图像进行预处理,并经过对齐、配准、主成分分析等过程自动化建立腰椎统计形状模型数据库;
38.将建立的腰椎统计形状模型进行分类分析,形成多个子数据库并对子数据库求解平均形状模型;
39.最终依据求解的子数据库腰椎平均形状模型进行椎间融合器的仿生设计。
40.本发明的有益效果:
41.1、自动化建立腰椎统计形状模型数据库,能够自动快速有效地生成大量腰椎三维形状模型,便于提取腰椎形状特征,有效节约了时间和人力成本;
42.2、以腰椎统计形状模型为基础,通过分类分析与仿生设计,设计出能够满足更大群体范围的、更加符合个体腰椎形状的椎间融合器,显著提高融合器与患者椎骨的贴合性,进而有助于降低松动和沉降风险。
附图说明
43.图1为本发明的流程图;
44.图2为经过两个l4-l5腰椎最近点迭代算法对齐、非刚性最近点迭代算法配准后的效果图;
45.图3为l4-l5腰椎第一个主成分下的变化效果图;
46.图4为在l4-l5腰椎三维形状模型正中矢状面上测量椎间盘高度与节段前凸角示意图;
47.图5为基于一个子数据库设计具有仿生形状的前路椎间融合器示意图。
具体实施方式
48.以下将结合附图进一步详细说明本发明的具体实施方式:
49.具体实施方式中以l4-l5椎骨为例,建立其统计形状模型,并基于此统计形状模型设计前路椎间融合器;
50.将30个志愿者腰椎医学ct图像进行分割,重建l4-l5腰椎的三维形状模型,并输出stl格式文件;
51.将得到的l4-l5腰椎三维形状模型进一步处理,简化并优化网格,使顶点数保持在
4000-5000之间,以提高后续算法效率;
52.通过预处理得到含有30个l4-l5腰椎三维形状模型样本的训练集;
53.训练集中l4-l5腰椎三维形状模型样本可表示为:
54.xi=(x
i1
,y
i1
,z
i1
,...,x
in
,y
in
,z
in
);,x
in
,
yin
,z
in
表示样本中点的坐标;
55.l4-l5腰椎训练集可表示为:x=(x1,x2,...,x
30
);
56.随机选取l4-l5腰椎三维形状模型训练集中一个l4-l5腰椎三维形状模型x1为模板模型,将剩余l4-l5腰椎三维形状模型,均与模板模型通过最近点迭代算法对齐;
57.该过程是为了尽可能减少不同人以及不同拍摄环境带来的位置误差;
58.更新得到对齐后的l4-l5腰椎三维形状模型训练集为:x=(x1,x
2,
…
,x
30
);
59.对齐后将模板模型x1,通过非刚性最近点迭代算法,配准到对齐后的l4-l5腰椎三维形状模型训练集;
60.该过程通过非刚性最近点迭代算法配准,获得了点数一致且点与点相对应的l4-l5腰椎三维形状模型训练集;
61.配准后更新l4-l5腰椎三维形状模型训练集为:x=(x1,x2,...,x
30
);
62.图2展示了其中一个l4-l5腰椎三维形状模型与模板模型对齐、配准效果图;
63.对l4-l5腰椎三维形状模型训练集主成分分析:
64.计算l4-l5腰椎三维形状模型训练集平均形状模型:
65.计算l4-l5腰椎三维形状模型训练集协方差矩阵:
[0066][0067]
计算协方差矩阵的特征值与特征向量:sφi=λiφi,λi表示协方差矩阵的特征值,将特征值从大到小依次排列,φi表示特征向量;
[0068][0069]
m为变化模式的个数,k表示前k个变化模式,p表示前k个变化模式占总的变化模式的的概率,取值为p=95%;
[0070]
本例中k=8时,占比为96.7%大于95%,即取k=8;
[0071]
l4-l5腰椎统计形状模型数据库可表示为:
[0072]
运行自动化建立腰椎统计形状数据库程序,自动生成l4-l5腰椎统计形状模型数据库;
[0073]
图3为l4-l5腰椎第一个主成分下的变化效果图;
[0074]
将得到的l4-l5腰椎统计形状模型数据库进行分类分析;
[0075]
该过程涉及在l4-l5腰椎三维形状模型的正中矢状面上进行椎间盘高度的测量以及节段前凸角的测量;
[0076]
通过镜像法求得l4-l5腰椎三维形状模型的正中矢状面;
[0077]
镜像法中需将l4-l5腰椎三维形状模型以任意一矢状面进行镜像操作,得到新的模型,新模型与原模型通过最近点迭代算法对齐;将对齐后的两个模型作为一个整体,求得其对称面,即正中矢状面;
[0078]
提取所需l4-l5腰椎解剖学特征,即在l4-l5腰椎三维形状模型正中矢状面上测量
出椎间盘高度与节段前凸角,并将测量后的l4-l5腰椎统计形状模型数据库以节段前凸角及椎间盘高度大小为标准进行分类分析,得到不同的子数据库;
[0079]
不同的子数据库之间区别在于节段前凸角与椎间盘高度不一样,并对子数据库求平均形状模型;
[0080]
图4为在l4-l5腰椎三维形状模型正中矢状面上测量椎间盘高度及节段前凸角示意图;
[0081]
依据求得的子模数据库的平均形状模型进行椎间融合器的仿生设计,通过提取l4椎骨的下终板表面与l5椎骨的上终板表面作为其设计面;
[0082]
基于此设计面,进行椎间融合器的仿生设计,设计出能够满足更大群体范围的、更加符合个体腰椎形状的前路椎间融合器。
[0083]
图5为基于其中一个子数据库平均形状模型设计的具有仿生形状的前路椎间融合器。
[0084]
综上,本发明能够自动化建立腰椎统计形状模型,并通过分类分析,基于腰椎的统计形状模型进行椎间融合器的仿生设计,通过具体实例说明了本发明的原理及效果。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1