1.本发明属于仪器识别技术领域,具体涉及一种基于开发板的无人值守小型发电机组仪表盘示数实时识别系统。
背景技术:2.小型发电机组是很多工程系统中的运行核心,对小型发动机组各项性能的实时监测也尤为重要。人为定时监测会消耗大量人力物力财力,甚至意外状况会危及检测人员的生命安全。由此实时监测机组并识别小型发电机组的仪表盘示数变得尤为重要。而且由于小型柴油发电机组的控制器都类似,国内有六大小型柴油发电机组控制器品牌,控制器结构和功能都几乎相同,甚至可以互换,因此这项系统的应用范围较广,有较高的开发价值。
3.尽管数字识别已经是一项成熟的技术,七段数码管的数字识别也被广泛应用,但实时监测小型发电机组的仪表盘示数以及各项性能灯的状态还有待提高。
技术实现要素:4.为解决上述问题,本发明公开了无人值守小型发电机组仪表盘示数实时识别系统,基于树莓派4b设计技术,通过定时拍摄仪表盘数据以及识别监测,识别精度高。
5.为达到上述目的,本发明的技术方案如下:无人值守小型发电机组仪表盘示数实时识别系统,包括 硬件方面:开发板(树莓派 4b),摄像头为 cameraimx519-78 16mp af camera 板载索尼imx519传感器,支持1600万超高清像素。在测试和使用时,系统自动运行检测程序,并将检测数据保存到本地文件中;如有需求,可通过串口将数据传输给其他设备。
6.软件方面:程序开发语言是python,将识别数据自动保存到本地,同时可以利用串口将数据传输给其他设备。可以借助vncviewer实现对开发板的远程操控和对检测效果的实时监测。
7.操作方法:步骤1,开机,识别系统进入工作模式,等待识别指令;步骤2,待树莓派的摄像头对准发电机组的仪表盘(可以偏移小角度),控制一定的距离,保持树莓派相对稳定,在电脑上树莓派的操作系统中会出现摄像头中截取的信息以及仪表盘上识别的数字,系统进入工作状态。
8.步骤3,主控机发出识别指令信号,通过串口等方式传输给树莓派。树莓派接受指令,进行识别,并将所识别数据整理报表后传回主控机。
9.步骤4,识别结束后,树莓派发出结束指令,暂停识别,休眠节省电源,等待下次主控机传输识别指令信号。
10.工作原理:系统提供了基于模式识别的多轮全屏幕循环数字检测方法;算法由一二轮匹配流程组成,通过二轮匹配检查示数表上是否有该模板所对应的数字;二轮匹配的目的,是判断
该匹配的数字是否进行了正确匹配;其原理便是比对匹配度峰值脚标与模板脚标是否对应;若并不对应,则匹配无效;数字检测结束后,匹配的示数会显示在左上角;此后再通过模板输出的匹配坐标横坐标大小对这些数据进行重排列,以得到所识别的示数。
11.本发明的有益效果为:(1)本发明实现原理可行,代码完善,所设计的装置比较容易实现,涉及到的算法可行性比较高,测试结果比较可靠。
12.(2)本发明一大创新为实时监测。当仪表盘读数有任何变化时,该系统也能检测到,并据此判断小型发电机组当前的运行状态。
13.(3)对小型发电机组进行实时监控是一项重要任务。本系统是基于图像识别,对在南极使用的小型发电机组进行故障诊断,能够为各种相关工程项目节省大量人力物力财力,同时提高安全性。
14.(4)在测试阶段,将系统应用到模拟南极环境的实验舱进行测试,获得具有说服力的数据。
附图说明
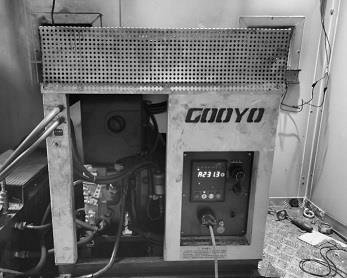
15.图1是本发明在使用时所要处理的对象,即部署在南极基地中的kp310v1.0型柴油发电机。本专利的目的就是实时检测发电机仪表盘示数。
16.图2是本发明的使用效果图图3是本发明在使用模板匹配时所需要的模板。
17.图4是本发明的硬件系统树莓派4b的实物图。在使用时可以将该装置安装到巡检机器人上。
18.图5为本发明的流程图。
19.图6为本发明所述的多轮全屏幕循环数字检测方法流程图。
具体实施方式
20.下面结合附图和具体实施方式,进一步阐明本发明,应理解下述具体实施方式仅用于说明本发明而不用于限制本发明的范围。
21.如图所示,本发明所述的一种无人值守小型发电机组仪表盘示数实时识别系统,系统总体结构设计系统本身由输入部分、数据处理部分以及输出部分组成。其中输入部分是开发板自带的摄像头部分,获取摄像头攫取的图像,并将该图像作为输入信息进行 处理。而数据处理部分则是整个系统整体的关键部分,其将输入的图像作为待处 理变量进行数据分析并综合得出结果;而获取结果后将结果进行输出,即为输出 部分的内容。总体的流程图如图5所示:子系统接口设计 整体的系统衔接通过 opencv 这一标准库实现。在输入部分与数据处理部分 的衔接通过 opencv 标准库中的 videocapture 类实现。该类将开发板外置摄像头中的图像所攫取后作为图像变量进行存储。此后在循环中将利用该变量进行图像处理。输出后的相应数据直接进行数据衔接并输出在屏幕之上,如图1所示。
22.边缘检测模板本系统使用识别算法的是最小轮廓法。将图片二值化后提取出边缘轮廓,将所有的轮廓存储进数组,找出面积最小的区域即为仪表盘,再对该区域进行模式识别,识别数字。
23.1. lcd 边缘可见预处理步骤:保持宽高比的缩放,转换灰度,高斯模糊以减少高频噪音,canny边缘检测器计算边缘图;2. 提取 lcd 本身在边缘图中寻找轮廓,并按面积大小倒序排列 ,遍历轮廓 ,应用轮廓近似,如果边缘有 4 个顶点(vertices),则找到了恒温器并展示,获得四个顶点后,可以通过四点透视变换提取 lcd ,提取恒温器,应用透视变换获得从上至下鸟瞰 lcd 图;3. 从 lcd 提取数字阈值化透视变换后的图以在较亮的背景(即 lcd 显示屏的背景)上显示出较暗的区域(即数字);应用一系列形态学运算来清理阈值图像,应用轮廓过滤,寻找实际的数字,在阈值图像上寻找轮廓,并初始化数字轮廓 lists,计算每一个七段部分的宽度、高度。定义七段的集合,根据 roi 尺寸计算出每个段的近似宽度和高度。提取分段 roi,计算 segment 的面积,并计算每个线段的非零像素总值。
24.匹配模板设计如图6所示,对本发明中使用到的基于模式识别的多轮全屏幕循环数字检测方法进行说明。
25.首先,该方法的最基本支撑点在于:图片上某个数字对于该数字的匹配度一定会大于对其他数字的匹配度即对应的匹配数值阈值将大于其余数字的匹配阈值。
26.利用该点,我们首先将模板中的每个数字对于图片整体进行全图遍历,寻找相似度最大的一块区域,并接下来再对该区域进行二轮匹配检索数字值,即对该块区域进行小范围的拓宽,并在这块拓宽后的范围内进行其他数字的相似度匹配。若存在其他数字的相似度大于最开始的数字的相似度,即相似度与坐标不匹配,则判断该数字无效,暂时删除该模板,并回溯步骤至一轮循环;若其他数字的相似度都小于起始时的数字的相似度,即相似度与坐标匹配,则判断该区域即为二轮模板对应数字,将令该区域删除处理后接下来的数字一轮匹配。
27.第一遍循环将通过穷举方式枚举各个数字区域,设定拟定坐标,并由二轮匹配进行相似度检测,以获得对应的数字。此后将数字进行输出,再通过检测一轮匹配的坐标排序将数字摘取出来,整理合适顺序,由此获得识别数码管数值。
28.需要说明的是,以上内容仅仅说明了本发明的技术思想,不能以此限定本发明的保护范围,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰均落入本发明权利要求书的保护范围之内。