基于无人机盘点的立体货架物资快速盘点方法及系统与流程
本发明涉及货物盘点,尤其涉及一种基于无人机盘点的立体货架物资快速盘点方法及系统。
背景技术:
1、目前,电网企业电力物资仓库针对立体货架的物资盘点往往采用从立体货架调出物资至人工盘点位,依靠人工目视化观察物资规格型号与数量的方式进行盘点。
2、其中,一是由于电力物资的形态差异区别于其他一般的生活物资,这种区别性主要在于电力物资的外观形态差别较大,导致出厂时的包装形态一般没有统一的标准化包装封装,部分单品价值高的物资形态较为标准的物资带有标准纸质包装,如电缆头、隔离开关等,部分单品价值较低且外观形态较为独特的物资,如耐张线夹、绝缘子等电力金具散件类物资,一般供应商采用麻袋、特质支架等材质进行包装。二是电力物资的材质大多数含有金属成分,因此也难以用一般rfid标签来对物资赋码识别。而通过全面用抗金属效益的rfid标签投入成本又过高,因此除大型电力物资外,大部分可存储于货架的电力物资出厂时一般不带有rfid标签。此外,金属件电力物资在诸如麻袋的非标准化包装中产生上下交叠,通过视觉识别盘点难度很大,实用性不高。三是电力物资在市场上的交易模式主要是b2b非零售模式。物流、商流、资金流主要是在工商业供需方内部流动,因此,大部分的电力物资出厂时包装都没有统一的商品条码,因此,通过应用条码识别设备按“一物一条码”读取的盘点方式变为不可行。以上诸因素导致目前针对立体货架存储的电力物资需要依靠人工开展盘点。
3、在盘点技术应用方面,技术较为成熟且成本较为可控的方法一般是基于rfid标签的辨识方法,首先在物资表面张贴rfid标签,将物资信息绑定在rfid芯片中,然后,通过各类的可移动机器或设备(如轨道探头、agv小车、无人机等)搭载rfid读取装置,通过遍历所有仓位感知各仓位中物资表面所绑定的rfid芯片来完成现场实物数量的收集,并进一步和后台的台账信息进行比较,从而自动得出盘点结果。其次,在盘点策略选择方面上,一般采用对物资全盘的策略,也即是对每一个货位均进行数量的识别,但大型仓库由于物资种类多,占用货位也多,导致每启动一次全面盘点都耗时巨大。部分智能仓库采用随机盘点或循环盘点的策略,即每次随机对部分物资抽查或一段时间内分批对物资盘点,这类方法一定程度上降低了盘点的耗时,但本质仍然是一种定性的盘点策略选择方法,盘点策略科学性有待加强。
4、综上,为提高存储电力物资的立体仓库盘点质量和效率,目前,在关于无人机盘点技术领域方面,公开号为cn208544426u的中国实用新型专利公开了一种无人机自动盘点仓库货物系统,其采用了无人机搭载rfid读取器对仓库已粘贴了rfid标签的物资进行盘点,但由于存储于立体货架的电力物资一般形态较小、价值较低、金属成分高,一般难以按“一物一码”的方式进行rfid标签赋码贴标,所以,该方案用rfid盘点技术部分难以直接适用于电网企业的立体仓库,且该方案并不能确定盘点策略来规划无人机的路径,以便达到高效快速的盘点目的;公开号为cn112977831b的中国发明专利公开了一种无人机物资箱及物资盘点方法,其主要提供了人工通过将小件物资放置无人机机箱中,并利用称重的方式来换算机箱物资数量的盘点方法,该方法需要人将物资放置在某称重装置中换算,由于人工无法直接进入立体货架位,且立体货架存储物资的数量大,且在每个立体货架上安装称重传感器投资成本大,安装难度高,所以此方法对于立体货架的物资盘点难以适用,也不满足经济性。
5、综上,在立体货架物资盘点技术方面,现有的主流的通过rfid或条码识别因电力物资商业运作模式和存储特性等因素导致失效,目前绝大部分的成果均没有考虑盘点过程种如何在满足盘点质量的同时尽可能降低能耗的问题,通常采用周期性全面盘点,往往效率低下、能耗居高不下。为了提供立体仓库的盘点效率和盘点质量,解决立体仓库人工盘点方式以及传统无人机盘点技术方案中对盘点策略的忽视而单一采用全面盘点策略的效率低下的缺点。
技术实现思路
1、本发明提供了一种基于无人机盘点的立体货架物资快速盘点方法及系统,解决了立体货架物资盘点效率较低的技术问题。
2、有鉴于此,本发明第一方面提供了一种基于无人机盘点的立体货架物资快速盘点方法,包括以下步骤:
3、对立体货架构建空间坐标系,获取无人机在各库位盘点时的悬停坐标点;
4、基于预先获取的物资盘点优先级,得到物资盘点任务,将所述物资盘点任务以及无人机在各库位盘点时的悬停坐标点进行匹配,得到物资盘点任务对应的无人机所需遍历的悬停坐标点集合;
5、以无人机盘点飞行总路径最短构建无人机路径优化目标函数,确定约束条件,所述约束条件包括无人机的能耗约束、盘点库位不重复约束和无人机飞行出发点和返回点一致约束;
6、基于遗传算法对所述无人机路径优化目标函数进行求解,得到无人机最优路径,作为无人机盘点路径最佳方案;
7、通过无人机按照所述无人机盘点路径最佳方案执行物资盘点任务,获取物资盘点数量。
8、优选地,对立体货架构建空间坐标系,获取无人机在各库位盘点时的悬停坐标点的步骤具体包括:
9、以立体货架的最底层的第一行第一列库位的横梁和立柱交汇点作为立体货架的空间直角坐标系的原点,记为,构建空间坐标系;
10、通过下式计算立体货架n层j行k列库位的无人机盘点时的悬停坐标点为,
11、
12、式中,、、分别表示立体货架单个库位的长、宽、高,d表示立体货架单个库位的巷道宽度;
13、设置允许无人机悬停坐标点的飞行偏差为,通过下式计算无人机盘点的悬停空间域为,
14、
15、
16、。
17、优选地,基于预先获取的物资盘点优先级,得到物资盘点任务,将所述物资盘点任务以及无人机在各库位盘点时的悬停坐标点进行匹配,得到物资盘点任务对应的无人机所需遍历的悬停坐标点集合的步骤具体包括:
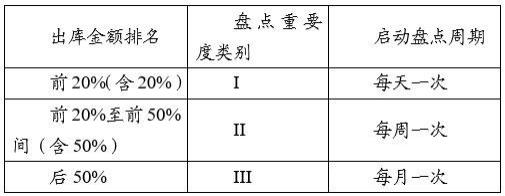
18、基于预先获取的物资盘点优先级,对不同的物资盘点优先级的物资划分盘点周期,根据所述盘点周期生成盘点任务,所述盘点任务包括需盘点的物资明细清单以及其对应的立体货架库位号,将所述立体货架库位号与无人机在各库位盘点时的悬停坐标点进行匹配,得到物资盘点任务对应的无人机所需遍历的悬停坐标点集合。
19、优选地,以无人机盘点飞行总路径最短构建无人机路径优化目标函数,确定约束条件,所述约束条件包括无人机的能耗约束、盘点库位不重复约束和无人机飞行出发点和返回点一致约束的步骤具体包括:
20、设无人机的路径有向图为,其中,v表示无人机所需遍历的悬停坐标点集合,记为,n表示无人机盘点集合,定义节点0为无人机盘点的起始点,节点1至为本次盘点任务的无人机所需遍历的悬停坐标点集合,e任意两个悬停坐标点之间的通道集合,,则以无人机盘点飞行总路径最短构建无人机路径优化目标函数为:
21、
22、式中,l表示无人机盘点飞行总路径,m表示无人机的往返次数,表达从i点到j点的飞行路径, x ijk表示第一决策因子, x ijk取值为0或1,若 x ijk取值为0,则表示在第k次的飞行路径执行过程中,不允许无人机走飞行路径,若 x ijk取值为1,则表示在第k次的飞行路径执行过程中,允许无人机走飞行路径;
23、确定约束条件为:
24、1)无人机的能耗约束:
25、
26、式中,表示无人机从i点到目标j点的耗电量,,其中,表示无人机单位飞行距离的耗电量,表示无人机悬停盘点过程的耗电量, c表示无人机的电量值上限;
27、2)盘点库位不重复约束:
28、
29、
30、3)无人机飞行出发点和返回点一致约束:
31、。
32、优选地,基于遗传算法对所述无人机路径优化目标函数进行求解,得到无人机最优路径,作为无人机盘点路径最佳方案的步骤具体包括:
33、基于遗传算法对所述无人机路径优化目标函数进行求解,得到所有飞行路径的第一决策因子,构成飞行路径及其对应的第一决策因子集合,筛选出第一决策因子为1的飞行路径,并依次连线得到无人机最优路径,作为无人机盘点路径最佳方案。
34、优选地,通过无人机按照所述无人机盘点路径最佳方案执行物资盘点任务,获取物资盘点数量的步骤具体包括:
35、通过无人机按照所述无人机盘点路径最佳方案执行物资盘点任务,到达目标悬停坐标点时,读取相应的货位的托盘二维码,将托盘二维码反馈至后台进行解析,得到货位对应的物资名称、物资类型、规格及台账数量;
36、通过所述物资类型判断物资是否为标准化包装物资,若判断物资是为标准化包装物资,则驱动无人机对货位物资进行3d视觉扫描,抓取物资堆的三维尺寸信息传输至后台,并执行下一步,若物资不为标准化包装物资,则驱动无人机对货位物资进行拍摄,获取物资视频信息传输至后台,通过后台内预设的视觉识别算法对物资视频信息中的物资进行识别,并统计所识别到的物资的数量;
37、通过深度相机获取物资堆的表层色块,获得表层色块面积;
38、通过下式计算标准化包装物资的数量为,
39、
40、式中,a1、b1、c1分别表示物资堆的长、宽、高, a 1表示物资包装的长度, b 1表示物资包装的宽度, c 1表示物资包装的高度,s表示表层色块面积,为第二决策因子,取值为0或1,当物资堆只有一种拣货扫描高度时,则赋值为0,当物资堆有两种以上的拣货扫描高度时,则赋值为1。
41、优选地,通过无人机按照所述无人机盘点路径最佳方案执行物资盘点任务,获取物资盘点数量的步骤之后包括:
42、将无人机遍历过的悬停坐标点标记为已遍历,判断无人机是否已遍历过物资盘点任务所对应的所有悬停坐标点,若判断无人机已遍历过物资盘点任务所对应的所有悬停坐标点,则将物资盘点数量与预设的盘点清单账目进行核对,并生成盘点报告。
43、第二方面,本发明提供了一种基于无人机盘点的立体货架物资快速盘点系统,包括:
44、坐标系构建模块,用于对立体货架构建空间坐标系,获取无人机在各库位盘点时的悬停坐标点;
45、盘点任务规划模块,用于基于预先获取的物资盘点优先级,得到物资盘点任务,将所述物资盘点任务以及无人机在各库位盘点时的悬停坐标点进行匹配,得到物资盘点任务对应的无人机所需遍历的悬停坐标点集合;
46、目标函数构建模块,用于以无人机盘点飞行总路径最短构建无人机路径优化目标函数,确定约束条件,所述约束条件包括无人机的能耗约束、盘点库位不重复约束和无人机飞行出发点和返回点一致约束;
47、求解模块,用于基于遗传算法对所述无人机路径优化目标函数进行求解,得到无人机最优路径,作为无人机盘点路径最佳方案;
48、盘点任务执行模块,用于通过无人机按照所述无人机盘点路径最佳方案执行物资盘点任务,获取物资盘点数量。
49、从以上技术方案可以看出,本发明具有以下优点:
50、本发明通过对立体货架构建空间坐标系,获取无人机在各库位盘点时的悬停坐标点,根据物资盘点优先级确定物资盘点任务,将物资盘点任务以及无人机在各库位盘点时的悬停坐标点进行匹配,得到物资盘点任务对应的无人机所需遍历的悬停坐标点集合,以无人机盘点飞行总路径最短构建无人机路径优化目标函数,确定约束条件,对无人机路径优化目标函数进行求解,得到无人机最优路径,作为无人机盘点路径最佳方案,通过无人机按照无人机盘点路径最佳方案执行物资盘点任务,获取物资盘点数量,实现对物资立体货架的快速盘点,从而提高了立体货架物资盘点效率。
- 还没有人留言评论。精彩留言会获得点赞!