一种报告类型匹配方法及装置与流程
1.本发明涉及报告类型匹配技术领域,尤其涉及一种报告类型匹配方法及装置。
背景技术:
2.随着人工智能技术的发展,ocr检测及文字提取技术已经趋于成熟,目前在数据的归档、信息的提取、身份证识别等多种场景有着显著的成效。目前许多行业也将该技术应用到了一些检验报告的信息提取中,但是由于报告种类的多样性与复杂性,关于如何在多种不同格式的纸质报告中,匹配出对应报告的类型,从而进行更加精准的文字提取也是十分重要的。目前的主要方式是通过识别出的报告大小、文字标题、文本内容等进行处理,但是一旦识别的报告属于涉密或者存在隐私的信息时,这种方式就有很大的局限性:
3.1、传统方式需要对报告中的关键信息进行提取,之后再匹配,存在泄密风险;
4.2、通过大小匹配的方式仅能简单区分大小具有明显区别的报告;
5.3、由于其涉密材料的特殊性质,匹配方法基本无法封装为云服务,间接增加了实现成本。
技术实现要素:
6.本发明通过提供一种报告类型匹配方法及装置,解决了现有技术中存在的技术问题。
7.本发明提供了一种报告类型匹配方法,包括:
8.获取待匹配灰度图像,将所述待匹配灰度图像进行分块处理,得到图像块;
9.计算各图像块的灰度均值;
10.对各图像块进行均值赋值处理;
11.通过公式和计算各图像块的像素重心点pc(xc,yc)的坐标;其中,di为第i个图像块的灰度均值,xi为第i个图像块的横坐标,yi为第i个图像块的纵坐标,g为总灰度值;
12.将像素重心点pc(xc,yc)的坐标与预设的模板库中的像素重心点坐标进行比较,得到匹配的模板。
13.具体来说,所述计算各图像块的灰度均值,包括:
14.通过公式dn=(gs+g
s+1
+g
s+2
……
ge)/la*lb计算得到图像块n的灰度均值dn;其中,gs、g
s+1
、g
s+2
……
ge分别为所述图像块n中各像素点的灰度值,la为图像块的横像素长度,lb为图像块的纵像素长度。
15.具体来说,所述将像素重心点pc(xc,yc)的坐标与预设的模板库中的像素重心点坐标进行比较,得到匹配的模板,包括:
16.比较所述像素重心点pc(xc,yc)的坐标与所述预设的模板库中的像素重心点坐标之间的距离,所述距离最近的像素重心点对应的模板为匹配出的模板。
17.本发明还提供了一种报告类型匹配装置,包括:
18.分块模块,用于获取待匹配灰度图像,将所述待匹配灰度图像进行分块处理,得到图像块;
19.灰度均值计算模块,用于计算各图像块的灰度均值;
20.均值赋值模块,用于对各图像块进行均值赋值处理;
21.重心点坐标计算模块,用于通过公式和和计算各图像块的像素重心点pc(xc,yc)的坐标;其中,di为第i个图像块的灰度均值,xi为第i个图像块的横坐标,yi为第i个图像块的纵坐标,g为总灰度值;
22.模板匹配模块,用于将像素重心点pc(xc,yc)的坐标与预设的模板库中的像素重心点坐标进行比较,得到匹配的模板。
23.具体来说,所述灰度均值计算模块,具体用于通过公式dn=(gs+g
s+1
+g
s+2
……
ge)/la*lb计算得到图像块n的灰度均值dn;其中,gs、g
s+1
、g
s+2
……
ge分别为所述图像块n中各像素点的灰度值,la为图像块的横像素长度,lb为图像块的纵像素长度。
24.具体来说,所述模板匹配模块,具体用于比较所述像素重心点pc(xc,yc)的坐标与所述预设的模板库中的像素重心点坐标之间的距离,所述距离最近的像素重心点对应的模板为匹配出的模板。
25.本发明中提供的一个或多个技术方案,至少具有如下技术效果或优点:
26.通过将报告图像进行分块并基于灰度值进行模糊处理形成新的像素图,之后计算出所有色块的像素重心值,以此匹配对应的报告类型,该方式有以下几项优势:
27.1)无需进行文字信息提取与存储便能够进行报告匹配,保证了隐私;
28.2)精度的提升不用进行大规模海量真实数据的训练,有特定表格的格式即可;
29.3)由于其脱敏的特性,让云端部署实施成为了可能,能够大大降低成本。
附图说明
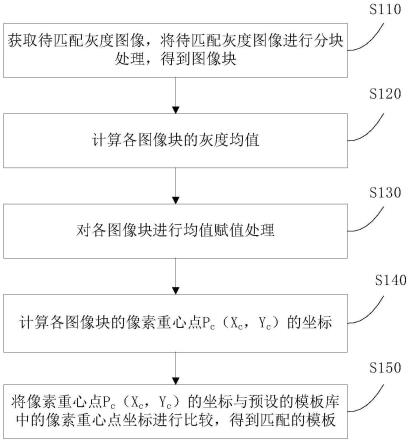
30.图1为本发明实施例提供的报告类型匹配方法的流程图;
31.图2为本发明实施例提供的报告类型匹配装置的模块图;
32.图3为本发明实施例的逻辑原理图;
33.图4为本发明实施例中分块后的效果图;
34.图5为本发明实施例中均值赋值后的效果图;
35.图6为本发明实施例中重心值计算后的效果图;
36.图7为本发明实施例中报告类型的匹配效果图。
具体实施方式
37.本发明实施例通过提供一种报告类型匹配方法及装置,解决了现有技术中存在的技术问题。
38.为了更好的理解上述技术方案,下面将结合说明书附图以及具体的实施方式对上述技术方案进行详细的说明。
39.参见图1,本发明实施例提供的报告类型匹配方法,包括:
40.步骤s110:获取待匹配灰度图像,将待匹配灰度图像进行分块处理,得到图像块;
41.步骤s120:计算各图像块的灰度均值;
42.对本步骤进行具体说明,计算各图像块的灰度均值,包括:
43.通过公式dn=(gs+g
s+1
+g
s+2
……
ge)/la*lb计算得到图像块n的灰度均值dn;其中,gs、g
s+1
、g
s+2
……
ge分别为图像块n中各像素点的灰度值,la为图像块的横像素长度,lb为图像块的纵像素长度。
44.步骤s130:对各图像块进行均值赋值处理;
45.步骤s140:通过公式和计算各图像块的像素重心点pc(xc,yc)的坐标;其中,di为第i个图像块的灰度均值,xi为第i个图像块的横坐标,yi为第i个图像块的纵坐标,g为总灰度值;
46.步骤s150:将像素重心点pc(xc,yc)的坐标与预设的模板库中的像素重心点坐标进行比较,得到匹配的模板。
47.对本步骤进行具体说明,将像素重心点pc(xc,yc)的坐标与预设的模板库中的像素重心点坐标进行比较,得到匹配的模板,包括:
48.比较像素重心点pc(xc,yc)的坐标与预设的模板库中的像素重心点坐标之间的距离,距离最近的像素重心点对应的模板为匹配出的模板。
49.参见图2,本发明实施例提供的报告类型匹配装置,包括:
50.分块模块100,用于获取待匹配灰度图像,将待匹配灰度图像进行分块处理,得到图像块;
51.灰度均值计算模块200,用于计算各图像块的灰度均值;
52.具体地,灰度均值计算模块200,具体用于通过公式dn=(gs+g
s+1
+g
s+2
……
ge)/la*lb计算得到图像块n的灰度均值dn;其中,gs、g
s+1
、g
s+2
……
ge分别为图像块n中各像素点的灰度值,la为图像块的横像素长度,lb为图像块的纵像素长度。
53.均值赋值模块300,用于对各图像块进行均值赋值处理;
54.重心点坐标计算模块400,用于通过公式和计算各图像块的像素重心点pc(xc,yc)的坐标;其中,di为第i个图像块的灰度均值,xi为第i个图像块的横坐标,yi为第i个图像块的纵坐标,g为总灰度值;
55.模板匹配模块500,用于将像素重心点pc(xc,yc)的坐标与预设的模板库中的像素重心点坐标进行比较,得到匹配的模板。
56.具体地,模板匹配模块500,具体用于比较像素重心点pc(xc,yc)的坐标与预设的模板库中的像素重心点坐标之间的距离,距离最近的像素重心点对应的模板为匹配出的模板。
57.下面对本发明实施例提供的方法及装置进行更具体的说明:
58.参见图3,本发明实施例主要分为图像分块处理、灰度值模糊处理、分块重心值计算、重心值匹配识别这四个主要过程,具体流程如下:
59.1.图像分块处理
60.假设通过相机拍摄的报告图像是由m个像素点构成的,其中r是横向像素,c是纵向像素,之后将图像按列l
a x lb的长宽比例,分成n块,如图4所示。设m1、m2、m3……mn
为被分出来的图像块,i为每行的分块数,j为每列的分块数,则
61.i=r/la62.j=c/lb63.2.灰度值模糊处理
64.设各个像素点的值分别为p1(x1,y1,g1)、p2(x2,y2,g2)、p3(x3,y3,g3)
……
pm(xm,ym,gm)。其中,x,y为某像素点的坐标,g为该像素点的灰度值,计算各m图像块中的灰度均值,图像块mn的灰度均值为dn,ps(xs,ys,gs)和pe(xe,ye,ge)分别为该图像块的起始点与结束点。则有
65.dn=(gs+g
s+1
+g
s+2
……
ge)/la*lb66.之后将图像块mn中的所有点中的g值进行均值处理,即gs、g
s+1
、g
s+2
、g
s+3
……
ge全部赋值为dn,则处理后的图像如图5所示。模糊处理后由于各图像块中的灰度值完全一致,因而将每个图像块当成一个点进行处理。则获取了一个i*j像素的新图像,p'1(x'1,y'1,d1),p'2(x'2,y'2,d2),p'3(x'3,y'3,d3)
……
p'n(x'n,y'n,dn).。。。
67.3.分块重心值计算
68.计算重新构造生成图像对应的像素重心点pc(xc,yc)并保存,如图6所示。假设g为总灰度值,i为当前点位,xc为重心点的x坐标,yc为重心点的y坐标,其计算方式如下:
69.g=d1+d2+d3……dn
[0070][0071][0072]
4.重心值匹配识别
[0073]
当有待识别的报告图片,将其按上述步骤,获取其像素重心点,之后以此与模板库中的重心点进行比较,通过两个重心点对应的坐标,计算出相应的间距,最终寻找与之形成的间距最短的重心点,则该点位对应的模板,为当前识别报告对应的模板,如图7所示。
[0074]
至此,整个匹配过程完成。
[0075]
本领域内的技术人员应明白,本发明的实施例可提供为方法、系统、或计算机程序产品。因此,本发明可采用完全硬件实施例、完全软件实施例、或结合软件和硬件方面的实施例的形式。而且,本发明可采用在一个或多个其中包含有计算机可用程序代码的计算机可用存储介质(包括但不限于磁盘存储器、cd-rom、光学存储器等)上实施的计算机程序产品的形式。
[0076]
本发明是参照根据本发明实施例的方法、设备(系统)、和计算机程序产品的流程图和/或方框图来描述的。应理解可由计算机程序指令实现流程图和/或方框图中的每一流程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的装置。
[0077]
这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理设备以特
定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令装置的制造品,该指令装置实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能。
[0078]
这些计算机程序指令也可装载到计算机或其他可编程数据处理设备上,使得在计算机或其他可编程设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程设备上执行的指令提供用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的步骤。
[0079]
尽管已描述了本发明的优选实施例,但本领域内的技术人员一旦得知了基本创造性概念,则可对这些实施例作出另外的变更和修改。所以,所附权利要求意欲解释为包括优选实施例以及落入本发明范围的所有变更和修改。
[0080]
显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1