一种图像相似度确定方法、装置和设备与流程
本发明涉及人工智能,尤其是指一种图像相似度确定方法、装置和设备。
背景技术:
1、图像相似度(image similarity degree,isd)用于度量两幅图片的相似程度,被广泛应用于图像聚类、图像内容检索(content based image recognition,cbir)、人脸识别和图像搜索引擎等。目前现有的图像相似度的计算方法为了达到较好的效果往往很耗时,比如,通过尺度不变特征转换(scale-invariant feature transform,sift)算子进行图像相似度的计算耗时时间较长,还有一些图像相似度计算方法需要一组训练样本以获取比较参数,比如,获取图像的哈尔(haar)特征进行图像相似度的计算。
2、现有的图像相似度确定方法大致分为两类,一些是基于图像灰度的相似度确定方法,还有一些是基于图像结构的相似度确定方法。基于特征相似度的图像评估(a featuresimilarity index for image quality assessment,fsim)属于前一种,它对于每一个像素点计算出多种特征,然后组织这些特征形成最终的相似度,结果当然相当耗时,一些方法采用多尺度直方图作为特征,这降低了计算复杂度但是同时丢失了结构特征,还有一些基于图像结构的相似度确定方法往往需要大量的样本数据进行有监督训练或者通过神经网络进行迭代学习,而不能快速广泛地进行应用。
3、综上,现有的图像相似度确定方法具有算法复杂,应用困难的问题。
技术实现思路
1、本发明技术方案的目的在于提供一种图像相似度确定方法、装置和设备,用以解决现有技术中,图像相似度确定方法具有算法复杂,应用困难的问题。
2、为了解决上述技术问题,本发明实施例提供如下技术方案:
3、本发明实施例提供一种图像相似度确定方法,包括:
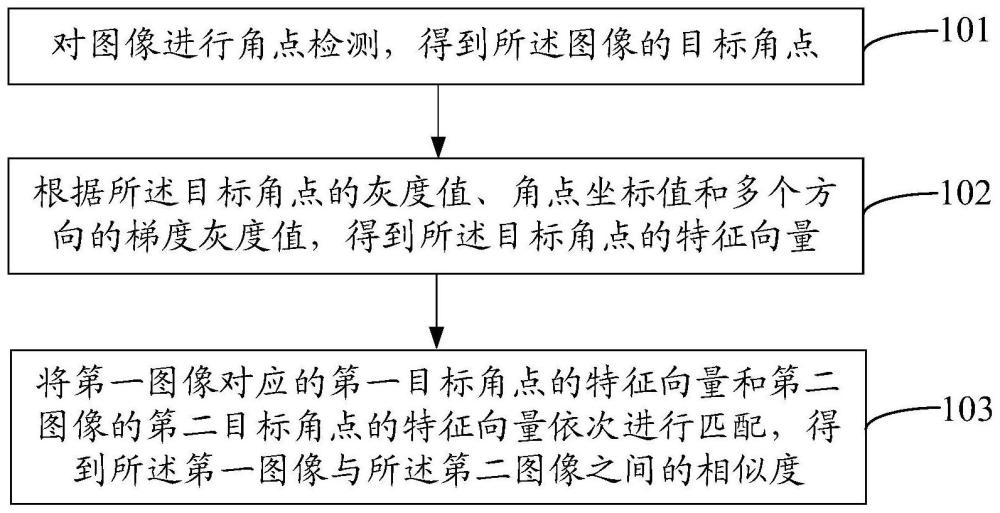
4、对图像进行角点检测,得到所述图像的目标角点;
5、根据所述目标角点的灰度值、角点坐标值和多个方向的梯度灰度值,得到所述目标角点的特征向量;
6、将第一图像对应的第一目标角点的特征向量和第二图像的第二目标角点的特征向量依次进行匹配,得到所述第一图像与所述第二图像之间的相似度。
7、可选地,所述对图像进行角点检测,得到所述图像的多个目标角点,包括:
8、获取所述图像的边缘;
9、对所述边缘内的图像进行角点检测,得到所述图像的目标角点。
10、可选地,所述对所述边缘内的图像进行角点检测,得到所述图像的目标角点,包括:
11、对所述边缘内的图像进行角点检测,得到所述图像的初始角点;
12、根据所述初始角点的角点曲率,确定所述图像的目标角点。
13、可选地,所述根据所述初始角点的角点曲率,确定所述图像的目标角点,包括:
14、将所述初始角点的角点曲率按照由大到小的顺序进行排列,选取前第一预设个数的角点曲率对应的初始角点作为所述目标角点;
15、和/或,
16、将所述图像划分为第二预设个数的区域,选取每一区域中,角点曲率最大的初始角点为所述目标角点。
17、可选地,所述对所述边缘内的图像进行角点检测,得到所述图像的初始角点,包括:
18、利用弦到点的距离累加cpda角点检测算法,对所述边缘内的图像进行角点检测,得到所述图像的初始角点。
19、可选地,所述根据所述目标角点的角点灰度值、角点坐标值和多个方向的梯度灰度值,得到所述目标角点的特征向量,包括:
20、根据所述目标角点的角点灰度值、与所述目标角点的灰度值对应的第一预设权重值、所述目标角点的目标方向上的第一梯度灰度值、与所述第一梯度灰度值对应的第二预设权重值、所述目标角点的目标方向上的第二梯度灰度值、与所述第二梯度灰度值对应的第三预设权重值,得到所述目标角点的目标方向上的目标灰度值;所述目标方向为所述多个方向中的一个方向;
21、根据多个所述目标方向上的目标灰度值,得到所述目标角点的特征向量;
22、其中,所述第一梯度灰度值为第一坐标值的灰度值,所述第一坐标值将所述角点坐标值扩大第一预设距离后的坐标值;
23、所述第二梯度灰度值为第二坐标值的灰度值,所述第二坐标值将所述角点坐标值扩大第二预设距离后的坐标值;
24、所述第一预设权重值、所述第二预设权重值和所述第三预设权重值之和为零;
25、所述第二预设距离大于所述第一预设距离。
26、可选地,所述根据每个所述目标方向上的目标灰度值,得到所述目标角点的特征向量,包括:
27、根据多个所述目标方向上的目标灰度值,得到所述目标角点的初始特征向量;
28、对所述初始特征向量进行归一化处理以及旋转主元处理,得到所述目标角点的特征向量。
29、可选地,所述对所述初始特征向量进行旋转主元处理,包括:
30、选取所述初始特征向量中目标灰度值的绝对值最大的目标灰度值;
31、将所述绝对值最大的目标灰度值旋转至所述初始特征向量的首个位置。
32、可选地,所述将第一图像对应的第一目标角点的特征向量和第二图像的第二目标角点的特征向量依次进行匹配,得到所述第一图像与所述第二图像之间的相似度,包括:
33、在所述第二图像的第二目标角点的特征向量中,选取与第一特征向量之间的欧式距离最近的第二特征向量;
34、在所述第一特征向量和所述第二特征向量之间的欧氏距离小于或等于预设的距离阈值的情况下,根据所述欧氏距离和预设的控制斜率,得到所述第一特征向量和所述第二特征向量之间的相似度;
35、将每一所述第一特征向量和对应的第二特征向量之间的相似度之和,作为所述第一图像与所述第二图像之间的相似度;
36、其中,所述第一特征向量为所述第一图像对应的第一目标角点的特征向量中的一个特征向量。
37、本发明实施例还提供一种图像相似度确定装置,包括:
38、角点检测模块,用于对图像进行角点检测,得到所述图像的目标角点;
39、第一处理模块,用于根据所述目标角点的灰度值、角点坐标值和多个方向的梯度灰度值,得到所述目标角点的特征向量;
40、第二处理模块,用于将第一图像对应的第一目标角点的特征向量和第二图像的第二目标角点的特征向量依次进行匹配,得到所述第一图像与所述第二图像之间的相似度。
41、可选地,所述角点检测模块,包括:
42、边缘获取单元,用于获取所述图像的边缘;
43、角点检测单元,用于对所述边缘内的图像进行角点检测,得到所述图像的目标角点。
44、可选地,所述角点检测单元,具体用于:
45、对所述边缘内的图像进行角点检测,得到所述图像的初始角点;
46、根据所述初始角点的角点曲率,确定所述图像的目标角点。
47、可选地,所述角点检测单元,具体用于:
48、将所述初始角点的角点曲率按照由大到小的顺序进行排列,选取前第一预设个数的角点曲率对应的初始角点作为所述目标角点;
49、和/或,
50、将所述图像划分为第二预设个数的区域,选取每一区域中,角点曲率最大的初始角点为所述目标角点。
51、可选地,所述角点检测单元,具体用于:
52、利用弦到点的距离累加cpda角点检测算法,对所述边缘内的图像进行角点检测,得到所述图像的初始角点。
53、可选地,所述第一处理模块,包括:
54、第一处理单元,用于根据所述目标角点的角点灰度值、与所述目标角点的灰度值对应的第一预设权重值、所述目标角点的目标方向上的第一梯度灰度值、与所述第一梯度灰度值对应的第二预设权重值、所述目标角点的目标方向上的第二梯度灰度值、与所述第二梯度灰度值对应的第三预设权重值,得到所述目标角点的目标方向上的目标灰度值;所述目标方向为所述多个方向中的一个方向;
55、第二处理单元,用于根据多个所述目标方向上的目标灰度值,得到所述目标角点的特征向量;
56、其中,所述第一梯度灰度值为第一坐标值的灰度值,所述第一坐标值将所述角点坐标值扩大第一预设距离后的坐标值;
57、所述第二梯度灰度值为第二坐标值的灰度值,所述第二坐标值将所述角点坐标值扩大第二预设距离后的坐标值;
58、所述第一预设权重值、所述第二预设权重值和所述第三预设权重值之和为零;
59、所述第二预设距离大于所述第一预设距离。
60、可选地,所述第二处理单元,具体用于:
61、根据多个所述目标方向上的目标灰度值,得到所述目标角点的初始特征向量;
62、对所述初始特征向量进行归一化处理以及旋转主元处理,得到所述目标角点的特征向量。
63、可选地,所述第二处理单元,具体用于:
64、选取所述初始特征向量中目标灰度值的绝对值最大的目标灰度值;
65、将所述绝对值最大的目标灰度值旋转至所述初始特征向量的首个位置。
66、可选地,所述第二处理模块,包括:
67、选取单元,用于在所述第二图像的第二目标角点的特征向量中,选取与第一特征向量之间的欧式距离最近的第二特征向量;
68、第三处理单元,用于在所述第一特征向量和所述第二特征向量之间的欧氏距离小于或等于预设的距离阈值的情况下,根据所述欧氏距离和预设的控制斜率,得到所述第一特征向量和所述第二特征向量之间的相似度;
69、第四处理单元,用于将每一所述第一特征向量和对应的第二特征向量之间的相似度之和,作为所述第一图像与所述第二图像之间的相似度;
70、其中,所述第一特征向量为所述第一图像对应的第一目标角点的特征向量中的一个特征向量。
71、本发明实施例还提供一种图像相似度确定设备,包括:处理器、存储器及存储在所述存储器上并可在所述处理器上运行的程序,所述程序被所述处理器执行时实现如上中任一项所述的图像相似度确定方法中的步骤。
72、本发明实施例还提供一种可读存储介质,所述可读存储介质上存储有程序,所述程序被处理器执行时实现如上中任一项所述的图像相似度确定方法中的步骤。
73、本发明上述技术方案中的至少一个具有以下有益效果:
74、本发明实施例所述的图像相似度确定方法,通过对图像进行角点检测,得到图像的目标角点,根据目标角点的灰度值、角点坐标值和多个方向的梯度灰度值,得到所述目标角点的特征向量,并将第一图像对应的第一目标角点的特征向量和第二图像的第二目标角点的特征向量依次进行匹配,得到所述第一图像与所述第二图像之间的相似度,该图像相似度确定方法,通过角点表征图像,利用角点的特征向量得到图像的相似度的算法简单且应用广泛。
- 还没有人留言评论。精彩留言会获得点赞!