一种燃气发电机失磁识别方法、系统及电子设备
1.本发明涉及电力系统继电保护领域,特别是涉及一种基于测量阻抗时序空间变化特征识别的数据驱动型燃气发电机失磁识别方法、系统及电子设备。
背景技术:
2.大型燃气发电机全部或部分失磁是一种较常见且严重的故障,燃气发电机相对于汽轮发电机异步功率小、调速器时滞大,在失磁后转子会更快地超速,并伴随着机组振动等现象,对机组本体及电网危害巨大,因此要求失磁保护更快速动作。2018年巴西电网“3.21”大停电事故中东北部电网某大型燃气机组因受系统振荡的影响导致失磁保护误动跳闸,该机组解列加剧了系统的不稳定以致最终崩溃。
3.以机端阻抗静稳边界为主判据的传统失磁保护只能通过机端测量阻抗变化的最终结果来判断是否失磁,但其只利用了测量阻抗变化最终结果信息,忽略了动态过程,无法反映复杂电网环境下各种扰动测量阻抗的变化,难以同时满足选择性和速动性。随着电网结构日趋复杂以及运行环境的变化,大型燃气机失磁保护的可靠性和速动性均面临着巨大的挑战。
技术实现要素:
4.本发明的目的是提供一种燃气发电机失磁识别方法、系统及电子设备,可提高燃气发电机失磁的识别精度及效率。
5.为实现上述目的,本发明提供了如下方案:
6.一种燃气发电机失磁识别方法,包括:
7.采集燃气发电机的测量阻抗轨迹;所述测量阻抗轨迹包括设定时段内各时刻的测量阻抗时序点;
8.根据所述测量阻抗轨迹,确定当前特征向量;
9.根据所述当前特征向量,基于判别模型,确定所述燃气发电机是否失磁;所述判别模型为预先采用训练样本集,基于融合混沌对立、自适应t分布和分组维度学习的海洋捕食者算法,对多核孪生支持向量机进行训练得到的;所述训练样本集中包括多个失磁样本的特征向量及多个非失磁样本的特征向量。
10.可选地,所述燃气发电机失磁识别方法还包括:
11.若所述燃气发电机失磁,则对所述燃气发电机进行失磁保护动作。
12.可选地,所述当前特征向量包括距离方差、运动方位角导数最小值、运动方位角导数均值、方向角导数均值、速度最大值及速度偏度;
13.所述根据所述测量阻抗轨迹,确定当前特征向量,具体包括:
14.截取所述测量阻抗轨迹在设定时窗内的测量阻抗时序点;
15.针对任一测量阻抗时序点,根据所述测量阻抗时序点,计算所述测量阻抗时序点的运动方位角、方向角及速度;
16.根据各测量阻抗时序点,计算距离方差;
17.根据各测量阻抗时序点的运动方位角,计算运动方位角导数最小值及运动方位角导数均值;
18.根据各测量阻抗时序点的方向角,计算方向角导数均值;
19.根据各测量阻抗时序点的速度,计算速度最大值及速度偏度。
20.可选地,采用以下公式计算第i个时窗的距离方差:
[0021][0022]
其中,为第i个时窗的距离方差,ni为第i个时窗的测量阻抗时序点数量,为第k个测量阻抗时序点,为燃气轮机输出功率标幺值的倒数。
[0023]
可选地,采用以下公式计算第i个时窗的运动方位角导数最小值及运动方位角导数均值:
[0024][0025][0026]
其中,d
α.min,i
为第i个时窗的运动方位角导数最小值,u
dα,i
为第i个时窗的运动方位角导数均值,ni为第i个时窗的测量阻抗时序点数量,αk为第k个测量阻抗时序点的运动方位角,α
k+1
为第k+1个测量阻抗时序点的运动方位角,δt为计算时间间隔。
[0027]
可选地,所述判别模型的建立方法包括:
[0028]
获取燃气发电机的测量阻抗轨迹样本集;所述测量阻抗轨迹样本集中包括多个失磁样本及多个非失磁样本;各失磁样本及和各非失磁样本均包括设定时段内各时刻的测量阻抗时序点;
[0029]
分别截取各失磁样本及各非失磁样本在设定时窗内的测量阻抗时序点,得到对应时窗内的测量阻抗轨迹样本集;
[0030]
根据设定时窗内的测量阻抗轨迹样本集,计算各失磁样本的特征向量及各非失磁样本的特征向量;
[0031]
根据各失磁样本的特征向量,确定失磁归一化矩阵;
[0032]
根据各非失磁样本的特征向量,确定非失磁归一化矩阵;
[0033]
根据所述失磁归一化矩阵及所述非失磁归一化矩阵,基于融合混沌对立、自适应t分布和分组维度学习的海洋捕食者算法,对多核孪生支持向量机进行迭代训练,以得到判
别模型。
[0034]
可选地,所述根据所述失磁归一化矩阵及所述非失磁归一化矩阵,基于融合混沌对立、自适应t分布和分组维度学习的海洋捕食者算法,对多核孪生支持向量机进行迭代训练,以得到判别模型,具体包括:
[0035]
采用混沌对立策略进行种群初始化,确定种群中各猎物的初始位置及对立位置,以得到初始种群;
[0036]
采用海洋捕食者算法对所述初始种群中各猎物的初始位置进行迭代更新,得到各猎物的更新位置;
[0037]
根据海洋捕食者算法的迭代次数,确定自适应t分布;
[0038]
根据所述自适应t分布,对各猎物的更新位置进行变异,以确定对应各猎物的变异位置;
[0039]
根据各猎物的变异位置确定各猎物的适应度,并根据适应度将猎物分为精英组和学习组;
[0040]
根据精英组及学习组的变异位置,对学习组中各猎物的变异位置进行交叉,以得到各猎物的最优位置;各猎物的最优位置包括第一上限惩罚系数、第二上限惩罚系数、核函数权重及径向基核超参数;
[0041]
基于各猎物的最优位置,根据所述失磁归一化矩阵及所述非失磁归一化矩阵,训练优化多核孪生支持向量机的超参数,以得到判别模型;所述多核孪生支持向量机的超参数包括设定时窗下失磁样本在核空间中的法向量、非失磁样本在核空间中的法向量、失磁样本的偏置系数及非失磁样本的偏置系数。
[0042]
可选地,所述判别模型为:
[0043][0044]
其中,f(x
num
)为判别结果,f(x
num
)=1表示对应的燃气发电机失磁,f(x
num
)=-1表示对应的燃气发电机非失磁,num为失磁样本与非失磁样本的总数,x
num
为特征矩阵,包括失磁归一化矩阵和非失磁归一化矩阵,xj为特征矩阵中的第j个特征向量,sgn()为取符号函数,ω
1,i
为第i个时窗下失磁样本在核空间中的法向量,ω
2,i
为第i个时窗下非失磁样本在核空间中的法向量,b
1,i
为第i个时窗下失磁样本的偏置系数、b
2,i
为第i个时窗下非失磁样本的偏置系数。
[0045]
为实现上述目的,本发明还提供了如下方案:
[0046]
一种燃气发电机失磁识别系统,包括:
[0047]
阻抗轨迹采集单元,用于采集燃气发电机的测量阻抗轨迹;所述测量阻抗轨迹包括设定时段内各时刻的测量阻抗时序点;
[0048]
特征向量计算单元,与所述阻抗轨迹采集单元连接,用于根据所述测量阻抗轨迹,确定当前特征向量;
[0049]
失磁识别单元,与所述特征向量计算单元连接,用于根据所述当前特征向量,基于判别模型,确定所述燃气发电机是否失磁;所述判别模型为预先采用训练样本集,基于融合
混沌对立、自适应t分布和分组维度学习的海洋捕食者算法,对多核孪生支持向量机进行训练得到的;所述训练样本集中包括多个失磁样本的特征向量及多个非失磁样本的特征向量。
[0050]
为实现上述目的,本发明还提供了如下方案:
[0051]
一种电子设备,包括存储器及处理器,所述存储器用于存储计算机程序,所述处理器运行所述计算机程序以使所述电子设备执行上述的燃气发电机失磁识别方法。
[0052]
根据本发明提供的具体实施例,本发明公开了以下技术效果:采集燃气发电机在设定时段内各时刻的测量阻抗时序点,得到测量阻抗轨迹,根据测量阻抗轨迹确定当前特征向量,根据当前特征向量,基于判别模型,确定燃气发电机是否失磁;判别模型为预先采用训练样本集,基于融合混沌对立、自适应t分布和分组维度学习的海洋捕食者算法,对多核孪生支持向量机进行训练得到。考虑燃气发电机测量阻抗的动态过程,并采用融合混沌对立、自适应t分布和分组维度学习的海洋捕食者算法,对多核孪生支持向量机进行训练,提高了判别模型对失磁识别的准确率及效率,进而同时满足失磁保护动作的速动性及选择性。
附图说明
[0053]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
[0054]
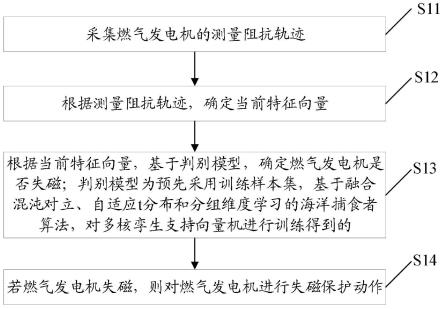
图1为本发明燃气发电机失磁识别方法的流程图;
[0055]
图2为基于ieee 39节点不同电源接入的扩展电网系统的结构示意图;
[0056]
图3为燃气发电机励磁故障设置回路示意图;
[0057]
图4为在时窗0.5s和1.5s的收敛曲线图;
[0058]
图5为燃气发电机失磁识别方法的整体过程示意图;
[0059]
图6为时窗长为0.4-0.6s的失磁故障识别过程示意图;
[0060]
图7为时窗长为1.4-1.6s的失磁故障识别过程;
[0061]
图8为本发明燃气发电机失磁识别系统的示意图。
[0062]
符号说明:
[0063]
阻抗轨迹采集单元-101,特征向量计算单元-102,失磁识别单元-103。
具体实施方式
[0064]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0065]
本发明鉴于机端测量阻抗变化的整个运动过程蕴含了系统大量信息,利用测量阻抗变化的动态过程能够更好地识别失磁故障,并借鉴轨迹识别以及ai(artificial intelligence,人工智能)技术在电力系统中良好的应用效果,从测量阻抗的动态过程出
发,提供一种燃气发电机失磁识别方法、系统及电子设备,实现同时满足失磁保护动作的速动性及选择性的目的。
[0066]
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
[0067]
实施例一
[0068]
如图1所示,本发明燃气发电机失磁识别方法包括:
[0069]
s11:采集燃气发电机的测量阻抗轨迹。所述测量阻抗轨迹包括设定时段内各时刻的测量阻抗时序点。
[0070]
s12:根据所述测量阻抗轨迹,确定当前特征向量。
[0071]
s13:根据所述当前特征向量,基于判别模型,确定所述燃气发电机是否失磁。所述判别模型为预先采用训练样本集,基于融合混沌对立、自适应t分布和分组维度学习的海洋捕食者算法,对多核孪生支持向量机进行训练得到的。所述训练样本集中包括多个失磁样本的特征向量及多个非失磁样本的特征向量。
[0072]
s14:若所述燃气发电机失磁,则对所述燃气发电机进行失磁保护动作。
[0073]
进一步地,步骤s12中,当前特征向量包括距离方差、运动方位角导数最小值、运动方位角导数均值、方向角导数均值、速度最大值及速度偏度。
[0074]
步骤s12具体包括:
[0075]
(1)截取所述测量阻抗轨迹在设定时窗内的测量阻抗时序点。在本实施例中,训练不同时窗的判别模型,在实际应用中,采用对应设定时窗的判别模型进行失磁识别。
[0076]
(2)针对任一测量阻抗时序点,根据所述测量阻抗时序点,计算所述测量阻抗时序点的运动方位角、方向角及速度。
[0077]
具体地,采用以下公式计算第k个测量阻抗时序点的运动方位角、方向角及速度:
[0078][0079][0080][0081][0082][0083][0084]
其中,为采用全波傅里叶算法计算得到电压矢量序列,为采用全波傅里叶算法计算得到的电流矢量序列,为固定时窗内测量阻抗时序点,n为测量阻抗时序点的总数,βk为第一中间量,ζk为第二中间量,为燃气轮机输出功率标幺值
的倒数,αk为第k个测量阻抗时序点的运动方位角,ρk为第k个测量阻抗时序点的方向角,vk为第k个测量阻抗时序点的速度,δt为计算时间间隔,在本实施例中δt=25ms。
[0085]
(3)根据各测量阻抗时序点,计算距离方差。
[0086]
具体地,采用以下公式计算第i个时窗的距离方差:
[0087][0088]
其中,为第i个时窗的距离方差,ni为第i个时窗的测量阻抗时序点数量,为第k个测量阻抗时序点,为燃气轮机输出功率标幺值的倒数。
[0089]
(4)根据各测量阻抗时序点的运动方位角,计算运动方位角导数最小值及运动方位角导数均值。
[0090]
具体地,采用以下公式计算第i个时窗的运动方位角导数最小值及运动方位角导数均值:
[0091][0092][0093]
其中,d
α.min,i
为第i个时窗的运动方位角导数最小值,u
dα,i
为第i个时窗的运动方位角导数均值,ni为第i个时窗的测量阻抗时序点数量,αk为第k个测量阻抗时序点的运动方位角,α
k+1
为第k+1个测量阻抗时序点的运动方位角,δt为计算时间间隔。
[0094]
(5)根据各测量阻抗时序点的方向角,计算方向角导数均值。
[0095]
具体地,采用以下公式计算第i个时窗的方向角导数均值:
[0096][0097]
其中,u
ρ,i
为第i个时窗的方向角导数均值。
[0098]
(6)根据各测量阻抗时序点的速度,计算速度最大值及速度偏度。
[0099]
具体地,采用以下公式计算第i个时窗的速度最大值及速度偏度:
[0100]
[0101][0102]
其中,v
max,i
为第i个时窗的速度最大值,v
s,i
为第i个时窗的速度偏度,s
v,i
为第i个时窗的速度序列的标准差。
[0103]
作为一种具体地实施方式,所述判别模型的建立方法包括:
[0104]
s21:获取燃气发电机的测量阻抗轨迹样本集。所述测量阻抗轨迹样本集中包括多个失磁样本及多个非失磁样本。各失磁样本及和各非失磁样本均包括设定时段内各时刻的测量阻抗时序点。
[0105]
在本实施例中,根据所研究燃气发电机确定接入电力系统的各种工况类型下的测量阻抗轨迹。具体地,根据实际参数获取仿真模型或历史录波数据,建立测量阻抗轨迹样本集。
[0106]
仿真平台基于pscad/emtdc,目标电力系统的拓扑结构如图2所示,图中1到39均表示节点。考虑接入强弱不同的电力系统以及风光混合的新能源电力系统,在各种不同运行条件下仿真失磁故障和其他异常运行状态。失磁保护方案的验证均在三台并列运行的燃气发电机之一g1上进行,g5为风光混合电源,在39个节点上分别设置不同类型的失磁故障,包括开路失磁、短路失磁、部分失磁。非失磁扰动工况包括短路、断线、超静稳、甩负荷、机组跳闸、调速器失灵、附近机组投入增多、负荷正常波动、潮流控制、变压器分接头调整以及功率波动。采集上述各种工况下的测量阻抗轨迹建立轨迹样本库,共700组样本,并划分测量阻抗轨迹样本集与测试集,比例为4:1。
[0107]
其中,燃气发电机励磁故障设置回路如图3所示,图中:ul为励磁电压,il为励磁电流,rm为灭磁电阻,mk1为第一开关,mk2为第二开关。正常运行时,第一开关mk1闭合,第二开关mk2断开,全失磁故障发生时,第一开关mk1断开,第二开关mk2闭合,灭磁电阻rm根据接入的大小不同实现短路失磁(rm=0)、开路失磁(rm=∞)以及经不同灭磁电阻失磁(rm∈(0,∞))。此外部分失磁通过直接设置直流电流源的大小实现。
[0108]
s22:分别截取各失磁样本及各非失磁样本在设定时窗内的测量阻抗时序点,得到对应时窗内的测量阻抗轨迹样本集。
[0109]
s23:根据设定时窗内的测量阻抗轨迹样本集,计算各失磁样本的特征向量及各非失磁样本的特征向量。
[0110]
具体地,失磁样本的特征向量和非失磁样本的特征向量的计算过程与步骤步骤s12中当前特征向量的计算过程相同,通过截取不同时窗计算对应的特征向量,在此不再赘述。
[0111]
s24:根据各失磁样本的特征向量,确定失磁归一化矩阵ai。
[0112]
s25:根据各非失磁样本的特征向量,确定非失磁归一化矩阵bi。
[0113]
具体地,失磁归一化矩阵ai为非失磁归一化矩阵bi
为m为失磁样本的总数,n为非失磁样本的总数。
[0114]
其中,f=a,b,下标i表示第i个时窗,下标j表示第j个样本(失磁样本或非失磁样本)。即表示第i个时窗下第j个样本的特征向量,表示第i个时窗下第j个样本的距离方差,表示第i个时窗下第j个样本的运动方位角导数最小值,表示第i个时窗下第j个样本的运动方位角导数均值,表示第i个时窗下第j个样本的方向角导数均值,表示第i个时窗下第j个样本的速度最大值,表示第i个时窗下第j个样本的速度偏度。
[0115]
s26:根据所述失磁归一化矩阵及所述非失磁归一化矩阵,基于融合混沌对立、自适应t分布和分组维度学习的海洋捕食者算法,对mkl-tsvm(multi-kernel learning twin-svm,多核孪生支持向量机)进行迭代训练,以得到判别模型。
[0116]
具体地,(1)采用混沌对立策略进行种群初始化,确定种群中各猎物的初始位置及对立位置,以得到初始种群。
[0117]
在失磁识别的模型参数优化问题中,对种群中的第p个猎物(每个猎物的位置代表一组优化变量的值)的初始位置x
p
可表示为:
[0118]
x
p
=[c
1,p c
2,p γ
p ε
p
]。
[0119]
其中,c
1,p
为第p个猎物的第一上限惩罚系数,c
2,p
为第p个猎物的第二上限惩罚系数,γ
p
为第p个猎物的核函数权重,ε
p
为第p个猎物的径向基核超参数。
[0120]
混沌对立策略生成猎物初始位置的对立位置,生成方式为:
[0121][0122]
其中,为第p个猎物对立位置的第q个变量,lbq为第q个变量的上限,μbq为第q个变量的下限,η
p
为tent混沌映射,为连乘符号,x
p,q
为第p个猎物的初始位置的第q个变量(第1个变量为c
1,p
,第2个变量为c
2,p
,第3个变量为γ
p
,第4个变量为ε
p
)。对随机生成的初始猎物位置及其对立位置的适应度进行排序,从而得到适应度最佳的前r个猎物位置作为初始种群。
[0123]
(2)采用海洋捕食者算法对所述初始种群中各猎物的初始位置进行迭代更新,得到各猎物的更新位置。
[0124]
(3)根据海洋捕食者算法的迭代次数,确定自适应t分布。
[0125]
(4)根据所述自适应t分布,对各猎物的更新位置进行变异,以确定对应各猎物的变异位置。
[0126]
具体地,完成三阶段mpa(marine predators algorithm,海洋捕食者算法)更新后设置自适应t分布算子,依据优化迭代次数进行自行调整种群变异的概率,变异的方式为:
[0127]
x
p
′
=x
p
+x
p
·
t(iter);
[0128]
式中,x
p
′
为第p个猎物的变异位置,t(iter)表示以迭代次数iter为自由度的t分
布。
[0129]
(5)根据各猎物的变异位置确定各猎物的适应度,并根据适应度将猎物分为精英组和学习组。
[0130]
(6)根据精英组及学习组的变异位置,对学习组中各猎物的变异位置进行交叉,以得到各猎物的最优位置。各猎物的最优位置包括第一上限惩罚系数、第二上限惩罚系数、核函数权重及径向基核超参数。
[0131]
具体地,将fads影响后的猎物依据适应度排序平均分成适应度高的精英组和适应度低的学习组。适应度低的学习组同精英组的平均维度值进行作差,取差异大的前h个进行交叉,根据交叉后学习组的适应度是否变优来决定最终是否交叉,交叉的过程可表示为:
[0132][0133][0134][0135]
其中,x
av,q
表示精英组第q维(变异位置中第q个变量)的平均维度值,x
p,q
′
为精英组中第p个猎物的变异位置中的第q个变量,δx
p,q
为学习组与精英组的平均维度值的差值,x
p
″
为第p个猎物的最优位置,为交叉第q维后的第p个猎物。
[0136]
(7)基于各猎物的最优位置,根据所述失磁归一化矩阵及所述非失磁归一化矩阵,训练优化多核孪生支持向量机的超参数,以得到判别模型。所述多核孪生支持向量机的超参数包括设定时窗下失磁样本在核空间中的法向量、非失磁样本在核空间中的法向量、失磁样本的偏置系数及非失磁样本的偏置系数。
[0137]
设有
[0138]
s=[k(ai,[a
i bi]
t
)e1];
[0139]
r=[k(bi,[a
i bi]
t
)e2];
[0140]
其中,s为第一中间矩阵,r为第二中间矩阵,e1为m维单位列向量,e2为n维单位列向量,ai为失磁归一化矩阵,bi为非失磁归一化矩阵,k(
·
)为核函数。如下式:
[0141]
k(x,y)=εk
poly
(x,y)+(1-ε)k
rbf
(x,y);
[0142]
式中的ε用来调节不同核函数所占的比重,取值范围为[0,1],即改进海洋捕食者算法得到的猎物最优位置中的径向基核超参数,k
poly
(x,y)为poly核函数,k
rbf
(x,y)为rbf核函数,二者由如下公式计算:
[0143]kpoly
(x,y)=((x,y)+1)d;
[0144]krbf
(x,y)=exp(-γ||x-y||2);
[0145]
其中,d为正整数多项式阶数,一般取值为2或3,γ表征被模型选中作为支持向量的样本的影响半径的倒数,即改进海洋捕食者算法得到的猎物最优位置中的核函数权重。
[0146]
则mkl-tsvm的失磁样本分类超平面的训练过程为:
[0147][0148]
求解上式标准的二次规划问题,得到:
[0149]
[ω
1,i b
1,i
]
t
=-(s
t
s)-1rt
α。
[0150]
mkl-tsvm的非失磁样本分类超平面的训练过程为:
[0151][0152]
求解上式标准的二次规划问题,得到
[0153]
[ω
2,i b
2,i
]
t
=(r
t
r)-1st
λ。
[0154]
其中,α为αj组成的列向量,λ为λj组成的列向量,c1为αj的上限,c2为λj的上限,αj和λj为拉格朗日系数,ω
1,i
为第i个时窗下失磁样本在核空间中的法向量,ω
2,i
为第i个时窗下非失磁样本在核空间中的法向量,b
1,i
为第i个时窗下失磁样本的偏置系数、b
2,i
为第i个时窗下非失磁样本的偏置系数。
[0155]
在本实施例中,impa(改进海洋捕食者算法)的种群设为40,最大迭代次数为100,c1、c2的范围为[0,1000],γ范围为[0,100],求解上式,得到判别模型:
[0156][0157]
其中,f(x
num
)为判别结果,f(x
num
)=1表示对应的燃气发电机失磁,f(x
num
)=-1表示对应的燃气发电机非失磁,num为失磁样本与非失磁样本的总数,x
num
为7
×
num的特征矩阵,包括失磁归一化矩阵和非失磁归一化矩阵,xj为特征矩阵中的第j个特征向量,sgn()为取符号函数,ω
1,i
为第i个时窗下失磁样本在核空间中的法向量,ω
2,i
为第i个时窗下非失磁样本在核空间中的法向量,b
1,i
为第i个时窗下失磁样本的偏置系数、b
2,i
为第i个时窗下非失磁样本的偏置系数。
[0158]
对mkl-tsvm训练完成后保留特征属性和模型参数,包括:不同时窗模型的参数,训练完成后得到的ω
1,i
、ω
2,i
和b
1,i
、b
2,i
。不同时窗模型的超参数,拉格朗日系数αi、λi的上限惩罚系数c
1,i
、c
2,i
、poly核函数超参数di、rbf核超参数γi、核函数权重εi。
[0159]
此外,在mkl-tsvm训练完成后,根据验证集选择评价指标对判别模型的性能进行评价,除准确率acc外,选择查准率pre、查全率rec以及f1值作为评估指标,其计算公式为:
[0160][0161][0162]
[0163][0164]
其中,tp是实际为失磁,判别为失磁的样本数,fn是实际为失磁,判别为非失磁的样本数,tn是实际为非失磁,判别为非失磁的样本数,fp是实际为非失磁,判别为失磁的样本数。不同时窗下的准确率均值如表1。图4为在时窗0.5s和1.5s的收敛曲线。
[0165]
表1不同时窗下的准确率均值
[0166]
时窗acc
v.av
(%)acc
t
(%)pre
t
(%)rec
t
(%)f
1.t
0.5s99.8899.3898.0010098.99 1.5s100100100100100
[0167]
相应地,mkl-tsvm在0.5s与1.5s时窗下的超参数分别为:
[0168]
ε
0.5s
=0.1787164,c
1,0.5s
=112.9767,c
2,0.5s
=385.6,γ
0.5s
=58.76644,ε
1.5s
=0.2178961,c
1,1.5s
=122.0703,c
2,1.5s
=235.0703,γ
1.5s
=87.52403。
[0169]
在实际对燃气发电机进行失磁识别时,实时采集燃气发电机机端阻抗变化信息;当保护启动,从测量阻抗时序空间变化轨迹中提取运动时序特征;计算ti±
0.1s时窗下的特征向量,输入判别模型,利用基于核空间分类距离的自适应时窗判别策略完成失磁识别。燃气发电机失磁识别方法的整体过程如图5所示。
[0170]
具体地,以所训练模型时窗长为中心,向前向后间隔0.1s分别取两个时窗,求得所选特征,计算核空间分类平均距离为:
[0171][0172]
若|l|》0.5,依据直接输出判别结果;
[0173]
若|l|《0.5,则利用更长时间窗训练的模型,向前向后间隔0.1s分别取两个时窗,求得所选特征,重新进行判别。
[0174]
实时应用中,每次动作决策完成后,将其结果经校核后均反馈到样本集中实现定期离线学习,进而可改良判别模型的性能。
[0175]
需要说明的是,本发明以占所有样本的1/5的样本作为测试样本来测试实时应用的效果。自适应识别模型识别表现如表2所示。
[0176]
表2测试集自适应时窗识别表现
[0177]
识别过程acc(%)rec(%)pre(%)f1-score第一步98.5796.1510098.03第二步100100100100
[0178]
图6和图7为测试集的识别过程,即num=3,两步对应的特征计算时窗长分别为0.4-0.6s和1.4-1.6s,时窗间隔为0.1s。第一步训练模型的准确率由于轨迹差异大而达不到100%,这时可通过基于核空间平均分类距离的自适应时窗失磁判别策略来提高模型的可靠性。在第一步中,有4个失磁样本和18个扰动振荡样本位于临界域内,2个失磁样本被漏判。将样本输入长时窗模型进行第二次判别,这时第一步在核空间位置分类平均距离各类
分界线较远的样本一部分可以靠近分界线,而漏判的失磁样本也能够被修正。
[0179]
为了更好地体现所提失磁方案的优越性,利用主判据为苹果形阻抗动作特性的传统失磁保护对验证集进行对比测试,保护采用实际广泛应用的“与”门出口逻辑,传统保护与所提保护的动作以及用时情况如表3所示。
[0180]
表3传统保护与本发明保护的动作以及用时情况
[0181][0182]
由此可见,在采用基于分类函数距离的双时窗判别策略的情况下准确率均值均能达到100%,即在1.6s内便可将失磁故障检测出来,对比传统失磁保护动作情况,本发明所提失磁保护的速动性和可靠性均得到极大提升。
[0183]
本发明突破了传统失磁保护的瓶颈,解决了速动性和选择性的矛盾,具有高可靠性和优良的泛化能力,在面对电网发生复杂变化时仍具有优良的适应能力。
[0184]
实施例二
[0185]
为了执行上述实施例一对应的方法,以实现相应的功能和技术效果,下面提供一种燃气发电机失磁识别系统。
[0186]
如图8所示,本实施例提供的燃气发电机失磁识别系统包括:阻抗轨迹采集单元101、特征向量计算单元102及失磁识别单元103。
[0187]
其中,阻抗轨迹采集单元101用于采集燃气发电机的测量阻抗轨迹。所述测量阻抗轨迹包括设定时段内各时刻的测量阻抗时序点。
[0188]
特征向量计算单元102与所述阻抗轨迹采集单元101连接,特征向量计算单元102用于根据所述测量阻抗轨迹,确定当前特征向量。
[0189]
失磁识别单元103与所述特征向量计算单元102连接,失磁识别单元103用于根据所述当前特征向量,基于判别模型,确定所述燃气发电机是否失磁。所述判别模型为预先采用训练样本集,基于融合混沌对立、自适应t分布和分组维度学习的海洋捕食者算法,对多核孪生支持向量机进行训练得到的。所述训练样本集中包括多个失磁样本的特征向量及多个非失磁样本的特征向量。
[0190]
实施例三
[0191]
本实施例提供一种电子设备,包括存储器及处理器,存储器用于存储计算机程序,处理器运行计算机程序以使电子设备执行实施例一的燃气发电机失磁识别方法。
[0192]
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。
[0193]
本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说
明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1