一种消除夜光遥感影像渐晕和条纹的辐射校正方法及装置
1.本技术涉及遥感卫星影像辐射校正技术领域,尤其涉及一种消除夜光遥感影像渐晕和条纹的辐射校正方法及装置。
背景技术:
2.最初的遥感卫星数据可以追溯到0级数据,即重建的、未处理的仪器数据和具有全分辨率的有效载荷数据,通过辐射校正、几何校正、正射投影等方法对其进行物理建模,从而生成更高级的产品。
3.sdgsat-1卫星由中国科学院“地球大数据科学工程”先导专项研制,是全球首颗专门服务联合国2030年可持续发展议程的科学卫星。其搭载了微光、多谱段和热红外成像仪3个有效载荷,其中微光传感器使用推扫式成像获取40m分辨率的彩色影像和10m分辨率的全色影像。完整的一景sdgsat-1卫星高分辨率微光传感器(glimmer imager for urbanization,简写为giu)的0级影像由2个相机,共16个电荷耦合器件(charge coupled devices,简写为ccds)拍摄而成,由于ccd辐射响应不均匀,成像过程中亮度值会衰减,导致ccd影像出现渐晕和条纹噪声问题。
4.随着影像处理技术的不断发展,渐晕校正和条纹噪声校正方法得以完善,为微光0级影像的辐射校正提供了技术支持。目前0级多光谱影像辐射校正较多运用侧滑数据,然而giu成像较难获取侧滑数据,并且正常的微光影像像素亮度值较低,难以提取有用的辐射信息,根据目前已有的方法较难确定ccd边缘渐晕区域的大小;每个0级ccd影像中都存在条纹噪声问题,目前存在的傅里叶去噪法、小波去噪法、矩匹配法、变差法和低秩矩阵法等去噪问题适用于分辨率较低、场景较小的遥感影像,较难适用于sdgsat-1微光轨道影像的校正。已有的sdgsat-1微光彩色和全色影像产品中仍然存在渐晕和条纹现象,解决这些问题是提高国产高分辨率微光影像辐射校正质量的关键所在。
技术实现要素:
5.本技术实施例提供了一种消除夜光遥感影像渐晕和条纹的辐射校正的方法,消除了遥感卫星影像中的渐晕和条纹,使得遥感卫星影像更加清晰。
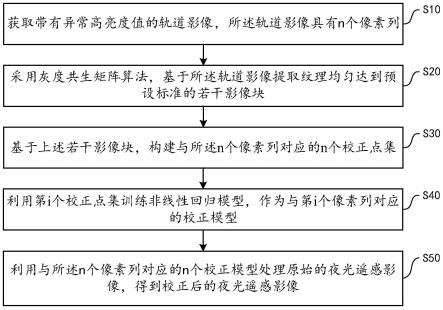
6.根据第一方面,本技术实施例提供一种消除夜光遥感影像渐晕和条纹的辐射校正的方法,该方法包括:获取带有异常高亮度值的轨道影像,所述轨道影像具有n个像素列;采用灰度共生矩阵算法;基于所述轨道影像提取纹理均匀度达到预设标准的若干影像块,基于所述若干影像块;构建与所述n个像素列对应的n个校正点集;利用第i个校正点集训练非线性回归模型,作为与所述第i个像素列对应的校正模型;利用与所述n个像素列对应的n个校正模型处理原始的夜光遥感影像,得到校正后的夜光遥感影像。
7.在一个实施例中,获取带有异常高亮度值的轨道影像,包括:选取所述带有异常高亮度值的轨道影像作为定标校正数据集。
8.在一个实施例中,采用灰度共生矩阵算法,基于所述轨道影像提取纹理均匀度达
到预设标准的若干影像块,包括:以所述轨道影像的中心像素列为基准,通过向左右各取50像素作为宽,提取多个宽100像素,高50像素的影像块;基于灰度共生矩阵算法,计算提取的多个影像块中每个影像块的熵和逆差矩;将所述多个影像块中熵小于第一预设阈值且逆差矩大于第二预设阈值的影像块,归入所述若干影像块。
9.在一个实施例中,所述基于所述若干影像块,构建与n个像素列对应的n个校正点集,包括:针对所述每个影像块,计算其中所有像元的整体像素均值,以及,计算所述n个像素列中任意的第i列像素的列像素均值;利用所述整体块像素均值和列像素均值形成校正点,归入所述第i个校正点集。
10.在一个实施例中,所述非线性模型中包括伽马校正项。
11.在一个实施例中,在所述利用与所述n个像素列对应的n个校正模型处理原始的夜光遥感影像,得到校正后的夜光遥感影像之后,所述方法还包括:将所述校正后的夜光遥感影像中大于像素亮度阈值的像素调整为所述像素亮度阈值。
12.在一个实施例中,在所述利用与所述n个像素列对应的n个校正模型处理原始的夜光遥感影像,得到校正后的夜光遥感影像之后,所述方法还包括:利用矩匹配算法处理所述校正后的夜光遥感影像,得到进一步校正后的夜光遥感影像。
13.根据第二方面,提供一种消除夜光遥感影像渐晕和条纹的辐射校正装置,其特征在于,所述装置包括:获取模块,用于获取带有异常高亮度值的轨道影像,所述轨道影像具有n个像素列;提取模块,用于采用灰度共生矩阵算法,基于所述轨道影像提取纹理均匀度达到预设标准的若干影像块;构建模块,基于所述若干影像块,构建与所述n个像素列对应的n个校正点集;训练模块,利用第i个校正点集训练线性回归模型,作为与所述第i个像素列对应的校正模型;第一校正模块,利用与所述n个像素列对应的n个校正模型处理原始的夜光遥感影像,得到校正后的夜光遥感影像。
14.在一个实施例中,所述获取模块具体用于:选取所述带有异常高亮度值的轨道影像作为定标校正数据集。
15.在一个实施例中,所述提取模块具体用于:以所述轨道影像的中心像素列为基准,通过向左右各取50像素作为宽,提取多个宽100像素且高50像素的影像块;基于灰度共生矩阵算法,计算提取的多个影像块中每个影像块的熵和逆差矩;将所述多个影像块中熵小于第一预设阈值且逆差矩大于第二预设阈值的影像块,归入所述若干影像块。
16.在一个实施例中,所述构建模块具体用于:针对所述每个影像块,计算其中所有像元的整体像素均值,以及,计算所述n个像素列中的任意第i列像素的列像素均值;利用所述整体块像素和列像素均值形成校正点,归入所述第i个校正点集。
17.在一个实施例中,所述装置还包括:第二校正模块,用于利用矩匹配算法处理所述校正后的夜光遥感影像,得到进一步校正后的夜光遥感影像。综上,采用本说明书实施例披露的一种消除夜光遥感影像渐晕和条纹的辐射校正的方法及装置,先选取带有异常高亮度值的轨道影像,从轨道影像正中间提取宽100像素,高50像素的影像块,利用灰度共生矩阵算法处理轨道影像得到纹理均匀模块,再计算纹理均匀模块的平均值和轨道影像的列均值,得到校正点集,接着利用校正点集训练非线性回归模型,之后,利用非线性回归模型校正遥感夜光轨道影像,从而消除了遥感卫星影像中的渐晕和条纹,使得遥感卫星影像更加清晰。
附图说明
18.图1是本技术实施例提供的一种消除夜光遥感影像渐晕和条纹的辐射校正方法的流程示意图;
19.图2示出一张带有异常高亮度值的轨道影像;
20.图3示出一个分割影像块的样例;
21.图4示出一张原始的彩色红波段卫星0级影像;
22.图5示出使用本发明方法对图4中的原始0级影像进行校正的校正后影像;
23.图6示出一张原始的彩色绿波段卫星0级影像;
24.图7示出使用本发明方法对图6中的原始0级影像进行校正的校正后影像;
25.图8示出一张原始的彩色蓝波段卫星0级影像;
26.图9示出使用本发明方法对图8中的原始0级影像进行校正的校正后影像;
27.图10示出一张原始的全色波段卫星0级影像;
28.图11示出使用本发明方法对图10中的原始0级影像进行校正的校正后影像;
29.图12示出另一张原始的全色波段卫星0级影像;
30.图13示出使用本发明方法对图12中的原始0级影像进行校正的校正后影像;
31.图14是本技术实施例提供的一种消除夜光遥感影像渐晕和条纹的辐射校正装置的结构示意图。
具体实施方式
32.为了使本技术实施例的目的、技术方案和优点更加清楚,下面将结合附图,对本技术实施例中的技术方案进行描述。
33.在本技术实施例的描述中,“示例性的”、“例如”或者“举例来说”等词用于表示作例子、例证或说明。本技术实施例中被描述为“示例性的”、“例如”或者“举例来说”的任何实施例或设计方案不应被解释为比其它实施例或设计方案更优选或更具优势。确切而言,使用“示例性的”、“例如”或者“举例来说”等词旨在以具体方式呈现相关概念。
34.在本技术实施例的描述中,术语“和/或”,仅仅是一种描述关联对象的关联关系,表示可以存在三种关系,例如,a和/或b,可以表示:单独存在a,单独存在b,同时存在a和b这三种情况。另外,除非另有说明,术语“多个”的含义是指两个或两个以上。例如,多个系统是指两个或两个以上的系统,多个屏幕终端是指两个或两个以上的屏幕终端。
35.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。术语“包括”、“包含”、“具有”及它们的变形都意味着“包括但不限于”,除非是以其他方式另外特别强调。
36.本技术实施例提供一种消除夜光遥感影像渐晕和条纹的辐射校正的方法,可以实现对夜光遥感影像中因辐射产生的渐晕和条纹进行精确、稳健和通用化的校正。示例性的,其中夜光遥感影像可以是由sdgsat-1卫星giu传感器采集的0级影像等。
37.图1是本技术实施例提供的一种。如图1所示,该方法包括如下的步骤s10-步骤s40。
38.在步骤s10中,获取带有异常高亮度值的轨道影像,所述轨道影像具有n个像素列。
39.可以理解,其中异常高亮度值是指接近且小于ccd传感器所能接收的最大亮度值。
40.在一些实施例中,从sdgsat-1卫星不同日期0级数据原始文件中,选择带有异常高亮度值的轨道,并读取出文件中0级影像作为校正数据集。需要理解,sdgsat-1卫星于当地时间21点左右过境,在尚未完全入夜时,上空大气对太阳光的散射会导致微光影像呈现均匀的异常高亮值。图2示出一张带有异常高亮度值的轨道影像。通常,这种异常影像会因为无法辨识地面光照信息而被弃用,本发明巧妙地将其用作微光影像的均匀定标场数据,解决了微光影像难以获取有效侧滑数据的问题。由上,可以获取到校正数据集,其中包括一张或多张带有异常高亮度值的轨道影像。
41.在步骤s20中,采用灰度共生矩阵算法,基于所述轨道影像提取纹理均匀达到预设标准的若干影像块。以下描述本步骤的子步骤:
42.(1)选取校正数据集中的轨道影像,从轨道影像中提取多个影像块。
43.在一些实施例中,将位于轨道影像正中间区域的影像划分成宽100高50大小的影像块。即影像宽为n,基于第n/2-50个像素列至第n/2+50个像素列,从第一行到最后一行分割出大小为100
×
50的影像块,图3示出一个分割影像块的样例,其中包含的白框区域为分割出的影像块。
44.在一个示例中,轨道影像的宽为500,高为1000,基于其中的第200列至于第300列,将从第0行至第49行的影像区域作为第1个影像块;将从第50行开始到第99行的影像区域作为第2个影像块,以此类推,直到划分出最后一个完整的影像块。
45.在另一些实施例中,从轨道影像中随机提取具有预定尺寸的多个影像块。
46.(2)基于灰度共生矩阵算法,计算所述多个影像块中每个影像块的熵和逆差矩。
47.具体地,使用灰度共生矩阵(gray-level co-occurrence matrix,简称glcm)算法中的熵(entropy)和逆差矩(inverse different moment,简称idm)作为纹理均匀度的评价指标。对其中glcm的介绍可以参考文献:liu,yongkun,et al."a general relative radiometric correction method for vignetting and chromatic aberration of multiple ccds:take the chinese series of gaofen satellite level-0images for example."ieee transactions on geoscience and remote sensing 60(2022):1-25]。
48.影像块的熵和逆差值可以分别采用公式(1)和(2)进行计算:
[0049][0050][0051]
式(1)和(2)中,l表示影像最大灰度级数,g(i,j)是像素(i,j)的glcm值。
[0052]
如此,可以计算提取出的各个影像块的熵和逆差值。
[0053]
(3)将上述多个影像块中熵小于第一预设阈值且逆差矩大于第二预设阈值的影像块,归入纹理均匀度达到预设标准的若干影像块。
[0054]
需理解的是,纹理均匀影像的entropy值小、idm值大,由此,可以将同时满足熵小于第一预设阈值(例如,0.03)和逆差矩大于第二预设阈值(例如,0.97)的影像块,视为纹理均匀影像块。在一个示例中,计算所述影像块的熵和逆差值,熵值小于0.03并且逆差值大于0.97的影像块视为纹理均匀影像块。
[0055]
由上,可以从轨道影像中提取出纹理均匀的若干影像块。
[0056]
在步骤s30中,基于上述若干影像块,构建与n个像素列对应的n个校正点集。
[0057]
具体地,所述轨道影像包含n列像素,n为自然数。基于此,针对所述若干影像块,先计算其中所有像元的整体像素均值,以及,计算所述n个像素列中任意的第i列像素的列像素均值,其中i∈[1,n];再以整体块像素均值和列像素均值为坐标值,形成校正点,归入第i个校正点集。如此,可以得到与n个像素列对应的n个校正点集。
[0058]
需要说明,以上主要以对某张轨道影像的处理为例,介绍n个校正点集的取得,实际上,还可以对上述校正数据集中的其他轨道影像也进行上述处理,从而将得到的校正点归入n个校正点集。
[0059]
由上,可以得到n个校正点集。
[0060]
在步骤s40中,利用第i个校正点集训练非线性回归模型,作为与第i个像素列对应的校正模型。
[0061]
通过对n个校正点集进行观察、分析发现,校正点在低亮度值处存在线性关系,在高亮度值处存在非线性关系,由此提出,在一个实施例中,构建加入gamma校正项的非线性函数,其中gamma校正项可以参考文献[h.farid,"blind inverse gamma correction,"ieee transactions on image processing,vol.10,no.10,pp.1428-1433,2001]。具体地,使用列文伯格-马夸尔特(levenberg-marquardt,结合梯度法和牛顿法)拟合每列(第i列)的渐晕和条纹噪声校正参数,对此可参见下示公式(3):
[0062][0063]
式(3)中,mean
nov
为均匀纹理块像素亮度整体均值,meani为影像像素亮度列均值,n为影像最大灰度级数,ω,b,c,γ为需求解校正参数。
[0064]
在一个示例中,利用第i个校正点集训练公式(3)示出的非线性回归模型,并将训练好的非线性回归模型作为第i列像素的校正模型,从而得到与n个像素列对应的n个校正模型。
[0065]
在另一个实施例中,还可以构建公式(3)以外的其他类型的非线性回归模型,并利用n个校正点集分别对其进行训练,对应得到n个校正模型。
[0066]
由上,可以得到n个校正模型。
[0067]
在步骤s50中,利用与n个像素列对应的n个校正模型处理原始的夜光遥感影像,得到校正后的夜光遥感影像。示例地,原始的夜光遥感图像为0级影像。
[0068]
本步骤中,基于n个校正模型对夜光遥感影像对应位置中n列像素中的每列进行校正,具体地,利用第i个校正模型对夜光遥感影像中的第i列像素进行校正。如此,能够校正原始夜光遥感影像中的渐晕和大部分条纹噪声。
[0069]
在一个实施例中,基于非线性回归模型校正后的夜光遥感影像,对校正后大于ccd传感器所能接收最大亮度值的像元调整为像素阈值,防止出现过拟合现象。
[0070]
在一个实施例中,使用矩匹配算法处理所述校正后的夜光遥感影像。在一个示例中,计算校正后的夜光遥感影像标准差,均值,每列的标准差和均值,利用矩匹配(moment matching)方法消除残余条纹噪声。
[0071][0072]
式(4)中,为校正后的像素(i,j)亮度值,σj和mj分别是第j列的标准差和均值,m为影像整体均值。
[0073]
以下,介绍采用本发明方法校正夜光遥感图像的一些应用实例。
[0074]
表1.sdgsat-1微光0级影像辐射校正的具体应用
[0075][0076]
见表1,选取了sdgsat-1卫星giu传感器为应用实例。选取8轨轨道影像,制作了校正集数据和验证集数据,使用校正集得到的校正参数直接运用到验证集影像中,均得到较好的辐射校正结果。
[0077]
应用实例一:选取2022年5月21目的彩色红波段卫星影像。使用本发明的方法能够解决其出现的渐晕和条纹噪声问题。见图4和图5,图4为原始0级影像,图5为使用本发明方法校正后的影像,本技术的方法可以消除影像的渐晕和条纹噪声问题。
[0078]
应用实例二:选取2022年6月26目的彩色绿波段卫星影像。使用本发明的方法能够解决其出现的渐晕和条纹噪声问题。见图6和图7,图6为原始0级影像,图7为使用本发明方法校正后的影像,本技术的方法可以消除影像的渐晕和条纹噪声问题。
[0079]
应用实例三:选取2022年7月3目的彩色蓝波段卫星影像。使用本发明的方法能够解决其出现的渐晕和条纹噪声问题。见图8和图9,图8为原始0级影像,图9为使用本发明方法校正后的影像,本技术的方法可以消除影像的渐晕和条纹噪声问题。
[0080]
应用实例四:选取2022年5月21日的全色波段卫星影像。使用本发明的方法能够解决其出现的渐晕和条纹噪声问题。见图10和图11,图10为原始0级影像,图11为使用本发明方法校正后的影像,本技术的方法可以消除影像的渐晕和条纹噪声问题。
[0081]
应用实例五:选取2022年7月8日的全色波段卫星影像。使用本发明的方法能够解决其出现的渐晕和条纹噪声问题。见图12和图13,图12为原始0级影像,图13为使用本发明方法校正后的影像,本技术的方法可以消除影像的渐晕和条纹噪声问题。
[0082]
与上述方法相对应的,本说明书实施例还披露一种校正装置。图14是本技术实施例提供的一种消除夜光遥感影像渐晕和条纹的辐射校正装置的结构示意图,如图14所示,所述装置1400包括以下模块:获取模块1410,用于获取带有异常高亮度值的轨道影像,所述轨道影像具有n个像素列;提取模块1420,用于采用灰度共生矩阵算法,基于所述轨道影像提取纹理均匀度达到预设标准的若干影像块;构建模块1430,基于所述若干影像块,构建与所述n个像素列对应的n个校正点集;训练模块1440,利用第i个校正点集训练线性回归模型,作为与所述第i个像素列对应的校正模型;第一校正模块1450,利用与所述n个像素列对
应的n个校正模型处理原始的夜光遥感影像,得到校正后的夜光遥感影像。
[0083]
在一个实施例中,所述提取模块1420具体用于:从所述轨道影像中提取多个影像块;基于灰度共生矩阵算法,计算所述多个影像块中每个影像块的熵和逆差矩;将所述多个影像块中熵小于第一预设阈值且逆差矩大于第二预设阈值的影像块,归入所述若干影像块。
[0084]
在一个实施例中,所述构建模块1430具体用于:针对所述每个影像块,计算其中所有像元的整体像素均值,以及,计算所述n个像素列中任意的第i列像素的列像素均值;利用所述整体像素和列像素均值形成校正点,归入所述第i个校正点集。
[0085]
在一个实施例中,所述装置1400还包括:第二校正模块1460,用于利用矩匹配算法处理所述校正后的夜光遥感影像,得到进一步校正后的夜光遥感影像。
[0086]
在上述实施例中,可以全部或部分地通过软件、硬件、固件或者其任意组合来实现。当使用软件实现时,可以全部或部分地以计算机程序产品的形式实现。计算机程序产品包括一个或多个计算机指令。在计算机上加载和执行计算机程序指令时,全部或部分地产生按照本技术实施例的流程或功能。计算机可以是通用计算机、专用计算机、计算机网络、或者其他可编程装置。计算机指令可以存储在计算机可读存储介质中,或者通过计算机可读存储介质进行传输。计算机指令可以从一个网站站点、计算机、服务器或数据中心通过有线,例如同轴电缆、光纤、数字用户线(dsl),或无线,例如红外、无线、微波等方式向另一个网站站点、计算机、服务器或数据中心进行传输。计算机可读存储介质可以是计算机能够存取的任何可用介质或者是包含一个或多个可用介质集成的服务器、数据中心等数据存储计算设备。可用介质可以是磁性介质(如软盘、硬盘、磁带等)、光介质(如dvd等)、或者半导体介质,如固态硬盘(solid state disk,ssd),等等。
[0087]
可以理解的是,在本技术的实施例中涉及的各种数字编号仅为描述方便进行的区分,并不用来限制本技术的实施例的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1