1.本发明涉及分布特征定量分析领域,特别涉及一种随机分布中空纤维膜组件的分布特征定量分析方法。
背景技术:2.膜分离技术由于其过程简单、无二次污染、分离系数大、节能等优点,目前在工业中已得到广泛应用,例如在环保、化工、能源、医药等领域。膜组件是膜分离过程的核心装置,其性能对于分离效率有着重要影响。膜组件有着多种结构形式,其中中空纤维膜组件由于其加工简便、比表面积大等优点有着广泛应用。中空纤维膜组件是由众多中空纤维膜管组成,由于中空纤维膜管是软聚合物,其分布难以控制,因此在实际生产中管束的排列通常是随机的。已有研究表明,中空纤维膜组件的分布特性往往对其分离性能有着重要影响。以空气除湿应用为例,管束的分布越均匀,除湿效果越好。相反,局部区域的管束过于集中或过于分散将导致除湿性能恶化。
3.然而,目前对于中空纤维膜组件的分布特征以定性分析为主,缺乏定量分析指标,导致难以对组件的分布特征进行深入对比分析。
技术实现要素:4.为了克服上述现有技术的不足,本发明提出一种随机分布中空纤维膜组件的分布特征定量分析方法,获得中空纤维膜组件的分布特性。
5.本发明的技术方案是这样实现的:一种随机分布中空纤维膜组件的分布特征定量分析方法,包括:
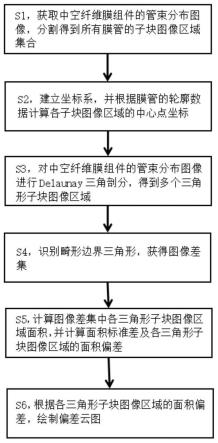
6.s1,获取中空纤维膜组件的管束分布图像,分割管束分布图像得到所有膜管的子块图像区域集合;
7.s2,建立中空纤维膜组件管束分布图像坐标系,并根据膜管的轮廓数据计算各子块图像区域的中心点坐标;
8.s3,对中空纤维膜组件的管束分布图像进行delaunay三角剖分,得到多个三角形子块图像区域;
9.s4,识别畸形边界三角形,获得图像差集;
10.s5,计算图像差集中各三角形子块图像区域面积,并计算面积标准差及各三角形子块图像区域的面积偏差;
11.s6,根据各三角形子块图像区域的面积偏差,绘制偏差云图。
12.优选地,在s1中,在s1中,利用图像识别技术识别膜管轮廓并分割管束分布图像得到所有膜管的子块图像区域集合rs,rs={m1,m2,m3,
…
,m
t
,
…
,m
t
},t∈[1,t],m
t
为rs中的子块图像区域,t为子块图像区域集合rs中的图像个数,也是膜管根数。
[0013]
优选地,在s2中,rs中各子块图像区域的中心点坐标形成坐标集合fs,fs={(xm1,ym1),(xm2,ym2),(xm3,ym3),
…
,(xm
t
,ym
t
)},(xm
t
,ym
t
)为子块图像区域m
t
的中心点坐标。
[0014]
优选地,在s3中,基于坐标集合fs得到的三角形子块图像区域集合ra,ra={q1,q2,q3,
…
,qj,
…
,qj},j∈[1,j],qj为ra中的三角形子块图像区域,j为三角形子块图像区域集合ra中三角形子块图像区域个数。
[0015]
优选地,每个三角形的外切圆不包含其他中心坐标点,在所有可能的三角剖分中,delaunay三角剖分形成的三角形的最小角度是最大的。
[0016]
优选地,在s4中,畸形边界三角形应同时满足以下两个条件:1)存在一条边只属于该三角形,而不被其他三角形共用;2)三角形的最大角大于150
°
。
[0017]
优选地,识别ra中所有同时满足上述两个条件的三角形子块图像区域,得到畸形边界三角形子块图像区域集合rb,rb={w1,w2,
…
,wk,
…
,wk},k∈[1,k],wk为rb中的三角形子块图像区域,k为畸形边界三角形子块图像区域集合rb中三角形个数。
[0018]
优选地,用rc表示图像差集,rc=r
a-rb={v1,v2,
…
,v
l
…
,v
l
},l∈[1,l],其中v
l
是rc中的三角形子块图像区域,l=j-k为图像差集rc中三角形个数。
[0019]
优选地,在s5中,计算公式如下:
[0020][0021][0022][0023][0024]
其中,ai是rc中的第i个三角形子块图像区域的面积,s0是rc中的总面积,l是个数,si是rc中的第i个三角形子块图像区域的标准化面积,s
av
是rc中的所有三角形子块图像区域的标准化平均面积,σ是所有三角形子块图像区域的面积标准差,p
avi
是rc中的第i个三角形子块图像区域的面积偏差。σ可以反映组件分布的整体均匀性,其值越小均匀性越好。p
avi
可以反映局部紧凑性,当它大于零,其值越大说明此处分布越稀疏,当它小于零,其值越小说明此处分布越密集。
[0025]
优选地,畸形边界三角形的p
avi
等于0。
[0026]
本发明的有益效果为:
[0027]
1、本发明通过σ反映组件分布的整体均匀性,p
avi
反映局部紧凑性,可以获取分布特征的定量评价指标。
[0028]
2、本发明还可以得到体现均匀度的偏差云图,为改善中空纤维膜组件的加工工艺提供帮助。
附图说明
[0029]
图1是本发明的步骤流程图;
[0030]
图2是本发明三角剖分及偏差云图绘制示意图。
具体实施方式
[0031]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0032]
请参阅图1,本发明揭示了一种随机分布中空纤维膜组件的分布特征定量分析方法,包括以下步骤:首先获取中空纤维膜组件分布图像,分割得到所有膜管的子块图像区域集合,并计算各子块图像区域的中心点坐标;其次对中空纤维膜组件的管束分布图像进行delaunay三角剖分多个三角形子块图像区域,并识别畸形边界三角形,获得图像差集;最后计算面积标准差及各三角形的面积偏差,绘制偏差云图。
[0033]
为了对本发明有个更清楚的认识,如图2所示,下面对本发明做进一步的详细说明,所述是对本发明的解释而不是限定。
[0034]
以一个含有20根膜管的中空纤维膜组件为例,如图2所示。
[0035]
步骤1,获取中空纤维膜组件的管束分布图像,如图2(a)所示;利用图像识别技术识别膜管轮廓并分割得到所有膜管的子块图像区域集合,rs={m1,m2,m3,
…
,m
t
,
…
,m
t
},t∈[1,t],m
t
为rs中的子块图像区域,t为子块图像区域集合rs中的图像个数,如图2(b)所示。
[0036]
步骤2,建立中空纤维膜组件管束分布图像坐标系,并根据膜管的轮廓数据计算rs中各子块图像区域的中心点坐标,形成坐标集合fs={(xm1,ym1),(xm2,ym1),(xm3,ym3),
…
,(xm
t
,ym
t
)},(xm
t
,ym
t
)为子块图像区域m
t
的中心点坐标,如图2(c)所示。
[0037]
步骤3,基于坐标集合fs进行delaunay三角剖分,获得多个三角形子块图像区域,得到三角形子块图像区域集合,ra={q1,q2,q3,
…
,qj,
…
,qj},j∈[1,j],qj为ra中的三角形子块图像区域,j为三角形子块图像区域集合ra中三角形子块图像区域个数,如图2(d)所示。
[0038]
步骤4,在三角形图像区域中,存在一些畸形的边界三角形,会引起指标计算的失真,应该予以剔除。畸形三角应同时满足以下两个条件:1)存在一条边只属于该三角形,而不被其他三角形共用,2)三角形的最大角大于150
°
。根据这两个条件识别ra中所有满足要求的三角形,得到畸形边界三角形集合,rb={w1,w2,
…
,wk,
…
,wk},k∈[1,k],wk为rb中的三角形子块图像区域,k为畸形边界三角形子块图像区域集合rb中三角形个数,如图2(e)所示。获得ra和rb的图像差集,用rc表示图像差集,rc=r
a-rb={v1,v2,
…
,v
l
…
,v
l
},l∈[1,l],其中v
l
是rc中的三角形子块图像区域,l=j-k为图像差集rc中三角形个数。
[0039]
步骤5,计算子块图像区域集合rc中三角形各子块图像区域面积,并根据以下公式计算rc的面积标准差σ,以及各个三角形各子块图像区域的面积偏差p
avi
。
[0040][0041][0042]
[0043][0044]
其中,其中,ai是rc中的第i个三角形子块图像区域的面积,s0是rc中的总面积,l是个数,si是rc中的第i个三角形子块图像区域的标准化面积,s
av
是rc中的所有三角形子块图像区域的标准化平均面积,σ是所有三角形子块图像区域的面积标准差,p
avi
是rc中的第i个三角形子块图像区域的面积偏差。
[0045]
σ可以反映组件分布的整体均匀性,其值越小均匀性越好。p
avi
可以反映局部紧凑性,当它大于零,其值越大说明此处分布越稀疏,当它小于零,其值越小说明此处分布越密集。通过计算得到σ=0.638。
[0046]
步骤6,根据各三角形子块图像区域的面积偏差p
avi
,绘制图像区域集合ra的偏差云图,其中畸形边界三角形的p
avi
等于0,如图2(f)所示。
[0047]
以上详细描述了本发明的较佳具体实施例。应当理解,本领域的普通技术无需创造性劳动就可以根据本发明的构思作出诸多修改和变化。因此,凡本技术领域中技术人员依本发明的构思在现有技术的基础上通过逻辑分析、推理或者有限的试验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。