一种基于图像质量的表面流速计算方法与流程
1.本发明涉及时空图像测流技术,特别涉及一种基于图像质量的表面流速计算方法。
背景技术:
2.时空图像测流法利用与水流方向平行的测速线集中的亮度变化随着时间变化产生的时空图,根据时空图上解析纹理的主方向就可以算出河流表面流速,获取时空图纹理主方向是时空图像测流法的关键。目前对于时空图的研究主要集中在提高纹理边缘特征识别精度,包括统计方法、基于图像变换的方法、基于模型的方法等,这些方法在良好的测试环境下都能得到精度较高的结果,但是在实际应用过程中,测流需要在不受约束的环境下开展,由于受到水面倒影、雨、雾、风等因素的影响,合成的时空图中常存在较多的干扰和错误的纹理信息,如果对这些质量较差的图像直接进行边缘特征识别,会由于图像过拟合、信息误导等问题,导致无法准确解析纹理主方向,无法保证测流结果的稳定和可靠性。
技术实现要素:
3.为了解决上述问题,本发明公开了一种基于图像质量的表面流速计算方法。本发明通过对合成的时空图质量进行评估,对流速值的准确性进行判断,剔除不准确的流速值并对剔除的不准确的流速值进行空间插值,为河道流量计算提供准确且精度较高的流速值,从而提高时空图像测流法的稳定性和可靠性。
4.本发明采用的技术方案为一种基于图像质量的表面流速计算方法,包括如下步骤:步骤一,拍摄一段测验河段视频,使得河流水面和岸边标定点在摄像机视野范围内;步骤二,根据拍摄的河流水面视频与岸边标定点,求解共线方程,找到屏幕坐标与物理坐标之间的关系,实现相机的标定;步骤三,利用现场布设的标定点采用像差修正的直接线性变换法对视频图像进行光学畸变校正;步骤四,在采集的视频图像中沿水流方向等间距设置多条检测线,以视频时长为纵坐标、以检测线的长度为横坐标,合成时空图,每条检测线都会产生一个时空图像;步骤五,结合时空图像纹理特征设计三个时空图质量评价指标,包括时空图清晰度、时空图标准性、时空图均匀性;步骤六,将上述质量评价指标作为时空图像质量评估因子,所有检测线合成的时空图的清晰度、标准性和均匀性进行归一化,把每个单因子的评估结果线性加权,计算其评估结果;步骤七,设置质量评估结果阈值σ,剔除时空图像的质量评估结果中小于σ的时空图像及其对应的检测线;
步骤八,根据步骤二得到的屏幕坐标与物理坐标之间的关系,以及时空图像的纹理角度,计算检测线表面流速大小;步骤九,对被剔除的检测线处,向两侧搜索最近的保留检测线,获取检测线对应的流速,通过反距离加权法进行插值,得到剔除位置处的表面流速值。
5.进一步的,步骤一中,标定点不少于6个,在测验河段的两岸分2组布设,单侧不少于3个,每组标定牌呈v型摆放在不同平面和直线。
6.进一步的,步骤二中,共线方程如下:其中(x,y,z)是标定点物理坐标,(x,y)是标定点对应的图像坐标,c是焦距,为已知量;(x0,y0,z0)是投影中心位置的物理坐标,是相机的旋转系数,为未知量。
7.进一步的,步骤五中时空图清晰度的计算公式如下:式中:i(x,t)表示时空图像灰度的大小,x表示合成时空图的检测线的像素长度,t表示合成时空图的视频图像的时长,s表示积分区域,与表示灰度的梯度,c表示时空图像的清晰度,c的取值范围为0至1,参数c的值越大,表明时空图像的纹理越清晰。
8.进一步的,步骤五中时空图标准性的计算方式如下:
对于尺寸为n*m的时空图像灰度图i(x,t),其灰阶为k,为k个灰阶的归一化后的统计直方图的频率向量,则图像的熵e(i)为:时空图像灰度图i(x,t) 尺寸为n*m,n≥m,x表示合成时空图的检测线的像素长度,t表示合成时空图的视频图像的时长,将图像取大小为的正方形区域为滑动窗口,遍历时空图像灰度图,a为自然数,a≥2;窗口内的子图像记为a
i,j
,i,j为子图像左上角元素在时空图像灰度图中的位置标号,,a
i,j
的熵与灰度图的熵的距离记为:给定阈值,记录距离小于阈值δ的子图像的标号集:相应子图像的个数记为|j|,时空图像灰度图的标准性系数r(i)为:。
9.进一步的,步骤五中时空图均匀性的计算公式如下:对时空图像灰度图i(x,t)进行二维离散傅里叶变换得到频谱图像,x表示合成时空图的检测线的像素长度,t表示合成时空图的视频图像的时长,令频谱图中心点为坐标原点,以纹理周期数为半径,提取纹理垂直的方向上的频谱数值,可得到对称特征峰,计算出特征峰处幅值相对于对称特征峰之间幅值之和的比值d,作为周期性结构纹理均匀性误差的评价指标;式中:d为计算得到的均匀性误差;β为归一化比例系数;(x0,y0)为频谱特征峰的位置,坐标分子是对称特征峰之间幅值之和;分母z(x0,0)表示特征峰高度值,即z0。
10.进一步的,步骤六中评估结果的计算公式如下:
其中,qn为第n条检测线合成的时空图像的质量评估值,cn为第n条检测线合成的时空图像的清晰度,rn为第n条检测线合成的时空图像的标准性,dn为第n条检测线合成的时空图像的均匀性。
11.进一步的,步骤八的具体实现方式如下;对剩余的尺寸大小为n*m的时空图像灰度图i(x,t)进行二维傅里叶变换,n≥m,x表示合成时空图的检测线的像素长度,t表示合成时空图的视频图像的时长,得到幅度谱|f(u,v)|,u、v为频谱图的像素坐标,其功率谱为,在功率谱中以图像中心为原点,为半径设置搜索线,以0.1
°
为步长,在0
°‑
180
°
的区间上建立极坐标,r为极径,θ为极角,计算能量-角度分布:,s(θ)取最大值时的为功率谱主方向,则时空图像的纹理角度;根据步骤二得到的屏幕坐标与物理坐标之间的关系,求解检测线的像素物理尺度l
x
其中(xs,ys)、(xe,y
e )为检测线首尾像素的屏幕坐标,(xs,ys)、(xe,ye)为检测线首尾像素的物理坐标;在物理坐标下沿检测线的水面运动特征在时间t内沿着检测线运动的距离为l,视频图像中运动特征像素点在k帧内运动了b个像素,则检测线表面流速大小为;其中l
x
为像素代表的空间尺度,l
t
为每帧图像的时间间隔,tanφ为时空图像纹理角的正切值。
12.进一步的,步骤九的具体实现方式如下;
其中,vo为剔除位置处表面流速值,v
p
、vq为剔除位置处左右两侧搜索到的保留检测线的表面流速,λ
p
、λq为左右两侧搜索到的保留检测线的权重,d
op
、d
oq
为左右两侧搜索到的保留检测线首像素与剔除位置处检测线首像素的物理坐标距离,(xo,yo)为剔除位置处检测线首像素的物理坐标,(x
p
,y
p
)为剔除位置处左侧搜索到的保留检测线首像素的物理坐标,(xq,yq)为剔除位置处右侧搜索到的保留检测线首像素的物理坐标。
13.与现有技术相比,本发明的优点和有益效果:(1)从时空图像的纹理特征出发,提出清晰度、标准性和均匀性三项量化指标对时空图像质量进行定量计算,解决现有时空图像法测流直接对时空图像进行边缘特征识别容易引入干扰和错误纹理信息的问题。
14.(2)采用线性加权法对时空图像质量进行综合量化评价,通过设定阈值剔除低质量的时空图像及对应的检测线,来获得包含准确流速信息的时空图像,解决现有时空图像测流法基于质量较差图像进行特征识别后容易产生不准确流速值的问题。
15.(3)采用考虑距离因素的空间插值方法计算剔除检测线位置的表面流速,能够为后续河道流量计算提供准确且精度较高的流速值。
附图说明
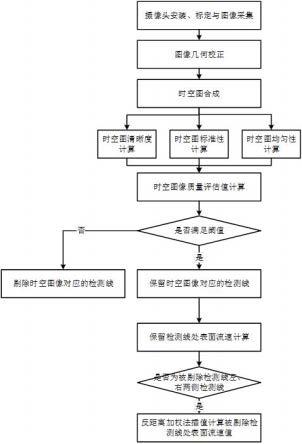
16.图1为本发明流程图。
具体实施方式
17.下面结合说明书附图对本发明的技术方案做进一步描述。
18.如图1所示,本发明提供的一种基于图像质量的表面流速准确性判断方法,包括如下步骤:步骤一:视频图像采集。
19.拍摄一段测验河段视频,使得河流水面和岸边标定点在摄像机视野范围内。所有标定点不少于6个,在测验河段的两岸分2组布设(单侧不少于3个),每组标定牌呈v型摆放在不同平面和直线;步骤二:相机标定。
20.根据拍摄的河流水面视频与岸边标定点,求解共线方程,找到屏幕坐标与物理坐标之间的关系。
21.共线方程如下:其中(x,y,z)是标定点物理坐标,(x,y)是标定点对应的图像坐标,c是焦距,为已知量;(x0,y0,z0)是投影中心位置的物理坐标,是相机的旋转系数,为未知量。
22.通过岸边的标定点(不少于6个),可以求解上述方程中的未知量,即可完成屏幕像素点坐标与物理坐标的变换。
23.步骤三:图像几何校正。
24.利用现场布设的标定点采用像差修正的直接线性变换法对视频图像进行光学畸变校正。
25.步骤四:时空图合成。
26.在采集的视频图像中沿水流方向等间距设置多条检测线,每条检测线的宽度为1像素,以视频时长为纵坐标、以检测线的长度为横坐标,合成时空图。每条检测线都会产生一个时空图像。
27.结合时空图纹理特征设计三个时空图质量评价指标,包括时空图清晰度、时空图标准性、时空图均匀性,指标的具体计算如下:步骤五:时空图清晰度计算。
28.清晰度计算公式如下:
式中:i(x,t)表示时空图像灰度的大小,x表示合成时空图的检测线的像素长度,t表示合成时空图的视频图像的时长,s表示积分区域,与表示灰度的梯度,c表示时空图像的清晰度,c的取值范围为0至1,参数c的值越大,表明时空图像的纹理越清晰。
29.步骤六:时空图标准性计算。
30.时空图像灰度图i(x,t)的纹理标准性越强,图像中任意两个形状及大小都相同的纹理块a1与a2之间的任意匹配性越好。鉴于时空图像灰度图i(x,t)的熵(这里用e(i)表示)反映了时空图像灰度图i所包含的信息量,时空图像灰度图i(x,t)任一子块a的熵e(a)都应与整幅图像的熵e(i)近似相等。因此时空图像局部熵e(a)与整体图像熵e(i)之间的接近程度可以反映纹理图像的标准性强弱,两者越接近,纹理的标准性越强,反之亦然。为此引入描述图像纹理标准性强度的一个度量: 标准性系数r。
31.对于尺寸为n*m的时空图像灰度图i(x,t),其灰阶为k,为k个灰阶的归一化后的统计直方图的频率向量,则图像的熵e(i)为:时空图像灰度图i(x,t) 尺寸为n*m,n≥m,x表示合成时空图的检测线的像素长度,t表示合成时空图的视频图像的时长,将图像取大小为的正方形区域为滑动窗口,遍历时空图像灰度图,a为自然数,a≥2;窗口内的子图像记为a
i,j
,i,j为子图像左上角元素在时空图像灰度图中的位置标号,,a
i,j
的熵与灰度图的熵的距离记为:
给定阈值,记录距离小于阈值δ的子图像的标号集:相应子图像的个数记为|j|,时空图像灰度图的标准性系数r(i)为:。
32.步骤七:时空图均匀性计算。
33.均匀性计算公式如下:对时空图像灰度图i(x,t)进行二维离散傅里叶变换得到频谱图像,x表示合成时空图的检测线的像素长度,t表示合成时空图的视频图像的时长,令频谱图中心点为坐标原点,以纹理周期数为半径,提取纹理垂直的方向上的频谱数值,可得到对称特征峰,计算出特征峰处幅值相对于对称特征峰之间幅值之和的比值d,作为周期性结构纹理均匀性误差的评价指标;式中:d为计算得到的均匀性误差;β为归一化比例系数;(x0,y0)为频谱特征峰的位置,坐标分子是对称特征峰之间幅值之和;分母z(x0,0)表示特征峰高度值,即z0。
34.步骤八:时空图像质量评估。
35.将上述质量评价指标作为时空图像质量评估因子,所有检测线合成的时空图的清晰度、标准性和均匀性进行归一化,把每个单因子的评估结果线性加权,计算其评估结果。
36.其中,qn为第n条检测线合成的时空图像的质量评估值,cn为第n条检测线合成的时空图像的清晰度,rn为第n条检测线合成的时空图像的标准性,dn为第n条检测线合成的时空图像的均匀性。
37.步骤九:检测线剔除。
38.设置质量评估结果阈值σ,剔除时空图像的质量评估值qn中小于σ的时空图像及其对应的检测线。
39.步骤十:检测线表面流速计算。
40.对剩余的尺寸大小为n*m的时空图像灰度图i(x,t)进行二维傅里叶变换,n≥m,x表示合成时空图的检测线的像素长度,t表示合成时空图的视频图像的时长,得到幅度谱|f
(u,v)|,u、v为频谱图的像素坐标,其功率谱为,在功率谱中以图像中心为原点,为半径设置搜索线,以0.1
°
为步长,在0
°‑
180
°
的区间上建立极坐标,r为极径,θ为极角,计算能量-角度分布:,s(θ)取最大值时的为功率谱主方向,则时空图像的纹理角度;根据步骤二得到的屏幕坐标与物理坐标之间的关系,求解检测线的像素物理尺度l
x
其中(xs,ys)、(xe,y
e )为检测线首尾像素的屏幕坐标,(xs,ys)、(xe,ye)为检测线首尾像素的物理坐标;在物理坐标下沿检测线的水面运动特征在时间t内沿着检测线运动的距离为l,视频图像中运动特征像素点在k帧内运动了b个像素,则检测线表面流速大小为;其中l
x
为像素代表的空间尺度,l
t
为每帧图像的时间间隔,tanφ为时空图像纹理角的正切值。
41.步骤十一:被剔除检测线的表面流速计算。
42.对被剔除的检测线处,向两侧搜索最近的保留检测线,获取检测线对应的流速,通过反距离加权法进行插值,得到剔除位置处的表面流速值。
43.其中,vo为剔除位置处表面流速值,v
p
、vq为剔除位置处左右两侧搜索到的保留检测线的表面流速,λ
p
、λq为左右两侧搜索到的保留检测线的权重,d
op
、d
oq
为左右两侧搜索到的保留检测线首像素与剔除位置处检测线首像素的物理坐标距离,(xo,yo)为剔除位置处检测线首像素的物理坐标,(x
p
,y
p
)为剔除位置处左侧搜索到的保留检测线首像素的物理坐标,(xq,yq)为剔除位置处右侧搜索到的保留检测线首像素的物理坐标。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1