一种基于地形起伏度静脉识别的控制系统及控制方法与流程
1.本发明属于智能控制系统技术领域,尤其涉及一种基于地形起伏度静脉识别的控制系统及控制方法。
背景技术:
2.生物识别技术是对人体自身所拥有的生物特征进行自动身份识别的技术,其中,静脉特征识别是生物识别技术中较为常见的一种,其通过提取人体手掌、手指等部位的静脉血管的特征进行识别的技术,是一种安全性很高的身份识别技术,将生物识别技术引入控制系统中,能够保证系统的安全性。
3.目前常用的静脉图像特征提取的方法主要分为纹理特征、细节点特征,基于纹理分析的方法能够有效的描述静脉的纹理特征,因此在静脉识别中有着广泛的应用。如专利号为cn101840511b的中国发明公开的手静脉特征提取与匹配识别方法,该专利公开的特征提取的方法为:对手静脉纹路图进行子块划分,对于每个子块图像采用双向特征值加权分块的双向二维主成分分析的方法进行特征提取;识别分析是将各个子块的特征作为整体采用最近邻分类器进行识别。由于受到现有图像采集设备和环境因素的影响,导致采集的手静脉图像存在对比度低、灰度分布不均等问题,这就降低了静脉特征提取的准确性,进而影响手静脉识别系统的识别率。在上述的静脉图像特征提取的方法过程中,在提取特征时未曾考虑中心点邻域像素点的影响,对于低质量手静脉图像,无法准确地表达静脉图像像素之间的变化情况,导致了静脉特征表达不够精确。
技术实现要素:
4.本发明提供了一种基于地形起伏度静脉识别的控制系统及控制方法,以解决现有静脉识别过程中无法准确地表达静脉细节特征,导致识别出错率高的问题。
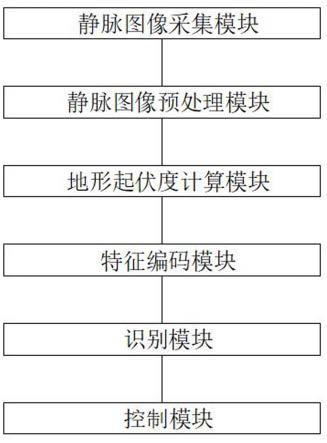
5.为了解决上述技术问题,本发明提供的技术方案为:本发明涉及一种基于地形起伏度静脉识别的控制系统,其包括:静脉图像采集模块,用于采集用户的静脉图像;静脉图像预处理模块,用于对静脉图像进行归一化处理和增强处理,形成静脉灰度图像;地形起伏度计算模块,采用滑动窗口法计算静脉灰度图像的地形起伏度;特征编码模块,用于设定地形起伏度阈值,基于静脉灰度图像的地形起伏度及地形起伏度阈值的大小关系对地形起伏度进行特征编码,形成特征图像;识别模块,采用像素点与区域比对的方式将待比对特征图像和模板特征图像的特征编码进行比对,进而判定相似度,基于相似度对待比对特征图像进行识别;控制模块,当识别结果为“匹配”时,用于给予该用户操作的权限。
6.优选地,所述的静脉图像预处理模块对静脉图像进行增强处理的具体步骤包括:s2.1.对静脉图像进行幂次方差变换;
s2.2.对变换后的静脉图像进行灰度校正,得到去除静脉图像偏移场后的图像;s2.3.对去除静脉图像偏移场后的图像进行去噪处理,得到平滑后的静脉灰度图像。
7.优选地,所述步骤s2.1对静脉图像进行幂次方差变换的变换公式为:公式中,表示变换前静脉图像像素点的坐标,表示点的灰度值,和分别表示变换前静脉图像的均值和方差,和分别表示变换后静脉灰度图像的均值和方差,、均为正数,取值范围为[0,1],表示幂次方差变换后的静脉灰度图像的灰度值;所述步骤s2.2对变换后的静脉图像进行灰度校正的公式为:公式中,为静脉图像的真实信息,为静脉图像的偏移场,为静脉图像的噪声信息,其中,所述的静脉图像的偏移场采用gabor滤波确定,其计算公式为:公式中,表示卷积,表示gabor滤波器;根据公式(2)和(3)可得去除静脉图像偏移场后的图像为:公式中,静脉图像的噪声信息设为0,即去除静脉图像偏移场后的图像表示为:。
[0008]
优选地,所述的地形起伏度计算模块采用滑动窗口法计算静脉灰度图像的地形起伏度的具体步骤为:s3.1.为静脉灰度图像设置一个固定长度的窗口,统计该窗口的最大和最小灰度值,计算该窗口的初始地形起伏度,循环移动窗口,完成静脉灰度图像初始地形起伏度的计算;s3.2.根据初始地形起伏度计算对应窗口内的平地面积;
s3.3.根据窗口内的平地面积完成静脉灰度图像地形起伏度的计算,计算公式为:公式中,和表示所要计算的像素点的行、列坐标,为像素点的地形起伏度,为像素点所在窗口区域内的静脉灰度图像的灰度平均值,为静脉灰度图像的灰度平均值,、分别为窗口区域内的静脉灰度图像的最大灰度值和最小灰度值;、分别为静脉灰度图像的最大灰度值和最小灰度值,和分别为窗口的长和宽,为窗口内的平地面积。
[0009]
优选地,所述的静脉灰度图像的灰度平均值的计算公式为:公式中,和分别表示静脉灰度图像的行列数,表示静脉灰度图像像素点的灰度值。
[0010]
优选地,所述的像素点所在窗口区域内的静脉灰度图像的灰度平均值的计算公式为:公式中,和分别为窗口的长和宽,表示窗口区域内的静脉灰度图像像素点的灰度值,为像素点所在窗口区域内的静脉灰度图像的灰度平均值。
[0011]
优选地,所述初始地形起伏度的计算公式为:;所述窗口内的平地面积为窗口内初始地形起伏度值小于设定阈值的个数,阈值根据采集的指静脉图像进行跑批得到,窗口内的平地面积的计算公式为:公式中,和分别为窗口的长和宽。
[0012]
优选地,所述特征编码模块基于静脉灰度图像的地形起伏度及地形起伏度阈值s的大小关系对地形起伏度进行特征编码的具体方式如下:若满足以下条件:,则设置该像素点的特征编码为0;若满足以下条件:
,则设置该像素点的特征编码为1;若满足以下条件:,则设置该像素点的特征编码为2;若满足以下条件:,则设置该像素点的特征编码为3;若满足以下条件: ,则设置该像素点的特征编码为4;若满足以下条件:,则设置该像素点的特征编码为5;若满足以下条件:,则设置该像素点的特征编码为6;若满足以下条件:,则设置该像素点的特征编码为7;为像素点的地形起伏度,地形起伏度阈值s的大小根据采集的指静脉图像进行跑批得到。
[0013]
优选地,所述识别模块采用像素点与区域比对的方式将待比对特征图像和模板特征图像的特征编码进行比对,进而判定相似度的具体步骤为:s5.1.计算待比对特征图像上的像素点与模板特征图像上对应区域块的比对值,计算公式为:s5.2.计算模板特征图像上的像素点与待比对特征图像上对应区域块的比对值,计算公式为:s5.3.计算待比对特征图像与模板特征图像的比对值,计算公式为:公式中,为待比对特征图像上的像素点与模板特征图像上对应区域块的比对值,为模板特征图像上的像素点与待比对特征图像上对应区域块的比对值,
为待比对特征图像与模板特征图像的比对值,为待比对特征图像,为模板特征图像,为待比对特征图像上的坐标为的像素点的特征编码,为模板特征图像中与待比对特征图像上的坐标为的像素点对应的点所在的矩形区域的特征编码,为模板特征图像上的坐标为的像素点的特征编码,为带对比特征图像中与模板特征图像上的坐标为的像素点对应的点所在的矩形区域的特征编码,为待比对特征图像和模板特征图像的大小。
[0014]
本发明还涉及一种基于地形起伏度静脉识别的控制方法,其包括以下步骤:s1.采集用户的静脉图像;s2.对静脉图像进行归一化处理和增强处理,形成静脉灰度图像;s3.采用滑动窗口法计算静脉灰度图像的地形起伏度;s4.设定地形起伏度阈值,基于静脉灰度图像的地形起伏度及地形起伏度阈值的大小关系对地形起伏度进行特征编码,形成特征图像;s5.采用像素点与区域比对的方式将待比对特征图像和模板特征图像的特征编码进行比对,进而判定相似度,基于相似度对待比对特征图像进行识别;s6.当识别结果为“匹配”时,给予该用户操作的权限。
[0015]
采用本发明提供的技术方案,与现有技术相比,具有如下有益效果:1.本发明涉及的基于地形起伏度静脉识别的控制系统引入了地形起伏度计算模块和特征编码模块,地形起伏度计算模块采用滑动窗口法计算静脉灰度图像的地形起伏度,特征编码模块基于静脉灰度图像的地形起伏度及地形起伏度阈值的大小关系对地形起伏度进行特征编码,进而提取静脉特征,该方法考虑到静脉图像的静脉血管灰度和背景灰度的差异,能够更加准确的表达静脉细节之间的变化,进而使静脉特征描述更加准确。
[0016]
2.本发明涉及的基于地形起伏度静脉识别的控制系统中的识别模块,采用像素点与区域比对的方式对待比对特征图像和模板特征图像的灰度值进行比对,进而判定相似度,基于相似度对待比对特征图像进行识别,通过该方式计算两幅静脉图像的静脉特征的相似度,可以更准确的计算相似度,进而降低误识率。
[0017]
3.本发明涉及的基于地形起伏度静脉识别的控制系统在对静脉图像进行增强处理时,先去除静脉图像偏移场,再进行去噪处理,避免了去噪过程中可能导致的特征灰度信息的丢失。
附图说明
[0018]
图1为本发明涉及的地形起伏度静脉识别的控制系统的结构框架图。
具体实施方式
[0019]
为进一步了解本发明的内容,结合实施例对本发明作详细描述,以下实施例用于说明本发明,但不用来限制本发明的范围。
[0020]
参照附图1所示,本发明涉及的基于地形起伏度静脉识别的控制系统包括:静脉图像采集模块,用于采集用户的静脉图像;
静脉图像预处理模块,用于对静脉图像进行归一化处理和增强处理,形成静脉灰度图像;地形起伏度计算模块,采用滑动窗口法计算静脉灰度图像的地形起伏度;特征编码模块,用于设定地形起伏度阈值,基于静脉灰度图像的地形起伏度及地形起伏度阈值的大小关系对地形起伏度进行特征编码,形成特征图像;识别模块,采用像素点与区域比对的方式将待比对特征图像和模板特征图像的特征编码进行比对,进而判定相似度,基于相似度对待比对特征图像进行识别;控制模块,当识别结果为“匹配”时,用于给予该用户操作的权限。
[0021]
基于地形起伏度静脉识别的控制系统可用于门禁系统、电梯控制系统、电子设备的控制系统等场景中,本实施例以运用于门禁系统的场景进行说明。
[0022]
采用上述基于地形起伏度静脉识别的控制系统的控制方法,其包括以下步骤:s1.门禁系统中的静脉图像采集模块采集用户的静脉图像,静脉图像可以是指静脉图像,也可以是掌静脉图像;s2.对静脉图像进行归一化处理和增强处理,形成静脉灰度图像,具体步骤为:s2.1.对静脉图像进行幂次方差变换,变换公式为:公式中,表示变换前静脉图像像素点的坐标,表示点的灰度值,和分别表示变换前静脉图像的均值和方差,和分别表示变换后静脉灰度图像的均值和方差,、均为正数,取值范围为[0,1],表示幂次方差变换后的静脉灰度图像的灰度值;s2.2.对变换后的静脉图像进行灰度校正,得到去除静脉图像偏移场后的图像,灰度校正的公式为:公式中,为静脉图像的真实信息,为静脉图像的偏移场,为静脉图像的噪声信息,其中,所述的静脉图像的偏移场采用gabor滤波确定,其计算公式为:公式中,表示卷积,表示gabor滤波器;根据公式(2)和(3)可得去除静脉图像偏移场后的图像为:
由于静脉图像的噪声较小,提前对图像进行去噪可能会丢失特征灰度信息,因此,这里将公式中的噪声信息设为0,其目的是为了在去除静脉图像偏移场后再进行噪声处理,则去除静脉图像偏移场后的图像表示为:;s2.3.对去除静脉图像偏移场后的图像进行去噪处理,去噪处理的方法为采用小窗口的模板对图像进行高斯滤波,得到平滑后的静脉灰度图像。
[0023]
s3.采用滑动窗口法计算静脉灰度图像的地形起伏度,其具体步骤为:s3.1.为静脉灰度图像设置一个固定长度的窗口,窗口的大小为w1*w2,统计该窗口的最大和最小灰度值,计算该窗口的初始地形起伏度,所述初始地形起伏度的计算公式为:;循环移动窗口,完成静脉灰度图像初始地形起伏度的计算;s3.2.根据初始地形起伏度计算对应窗口内的平地面积,所述窗口内的平地面积为窗口内初始地形起伏度值小于设定阈值的个数,阈值根据采集的指静脉图像进行跑批得到,窗口内的平地面积的计算公式为:公式中,和分别为窗口的长和宽;s3.3.根据窗口内的平地面积完成静脉灰度图像地形起伏度的计算,计算公式为:公式中,和表示所要计算的像素点的行、列坐标,为像素点的地形起伏度,为像素点所在窗口区域内的静脉灰度图像的灰度平均值,为静脉灰度图像的灰度平均值,、分别为窗口区域内的静脉灰度图像的最大灰度值和最小灰度值;、分别为静脉灰度图像的最大灰度值和最小灰度值,和分别为窗口的长和宽,为窗口内的平地面积;其中,静脉灰度图像的灰度平均值的计算公式为:;公式中,和分别表示静脉灰度图像的行列数,表示静脉灰度图像像素点的灰度值;
像素点所在窗口区域内的静脉灰度图像的灰度平均值的计算公式为:公式中,和分别为窗口的长和宽,表示窗口区域内的静脉灰度图像像素点的灰度值,为像素点所在窗口区域内的静脉灰度图像的灰度平均值。
[0024]
s4.设定地形起伏度阈值为s,基于静脉灰度图像的地形起伏度及地形起伏度阈值的大小关系对地形起伏度进行特征编码,获取像素点的灰度值,特征编码的具体方式如下:,则设置该像素点的特征编码为0;若满足以下条件:,则设置该像素点的特征编码为1;若满足以下条件:,则设置该像素点的特征编码为2;若满足以下条件:,则设置该像素点的特征编码为3;若满足以下条件:,则设置该像素点的特征编码为4;若满足以下条件:,则设置该像素点的特征编码为5;若满足以下条件:,则设置该像素点的特征编码为6;若满足以下条件:,则设置该像素点的特征编码为7;为像素点的地形起伏度,地形起伏度阈值s的大小根据采集的指静脉图像进行跑批得到。
[0025]
s5.采用像素点与区域比对的方式将待比对特征图像和模板特征图像的特征编码进行比对,其具体步骤为:
s5.1.计算待比对特征图像上的像素点与模板特征图像上对应区域块的比对值,计算公式为:s5.2.计算模板特征图像上的像素点与待比对特征图像上对应区域块的比对值,计算公式为:s5.3.计算待比对特征图像与模板特征图像的比对值,计算公式为:公式中,为待比对特征图像上的像素点与模板特征图像上对应区域块的比对值,为模板特征图像上的像素点与待比对特征图像上对应区域块的比对值,为待比对特征图像与模板特征图像的比对值,为待比对特征图像,为模板特征图像,为待比对特征图像上的坐标为的像素点的特征编码,为模板特征图像中与待比对特征图像上的坐标为的像素点对应的点所在的矩形区域的特征编码,为模板特征图像上的坐标为的像素点的特征编码,为带对比特征图像中与模板特征图像上的坐标为的像素点对应的点所在的矩形区域的特征编码,为待比对特征图像和模板特征图像的大小;通过比对值的大小判定相似度,基于相似度判定待比对特征图像与模板特征图像是否“匹配”,进而完成识别;s6.当识别结果为“匹配”时,给予该用户操作的权限,即解除门禁,允许用户进入。
[0026]
以上结合实施例对本发明进行了详细说明,但所述内容仅为本发明的较佳实施例,不能被认为用于限定本发明的实施范围。凡依本发明申请范围所作的均等变化与改进等,均应仍属于本发明的专利涵盖范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1