车位识别方法和识别装置、存储介质、车辆与流程
本发明涉及自动驾驶,尤其涉及一种车位识别方法、一种车位识别装置、一种计算机可读存储介质和一种车辆。
背景技术:
1、目前的车位检测方法复杂度过高,且由于常规卷积核的信息聚合能力较差,造成车位识别精度较低,在泊车场景下很难满足用户对于车位高识别率的要求。
技术实现思路
1、本发明旨在至少在一定程度上解决相关技术中的技术问题之一。为此,本发明的第一个目的在于提出一种车位识别方法,通过对车辆的环境图像进行标准化处理,并对处理后的图像进行特征提取,然后进行上采样和下采样后得到采样图,根据采样图获得车位的车位点概率图、车位角度概率图和车位类别概率图,从而确定车位信息,能够有效提高车位识别的精度,且识别速度快。
2、本发明的第二个目的在于提出一种车位识别装置。
3、本发明的第三个目的在于提出一种计算机可读存储介质。
4、本发明的第四个目的在于提出一种车辆。
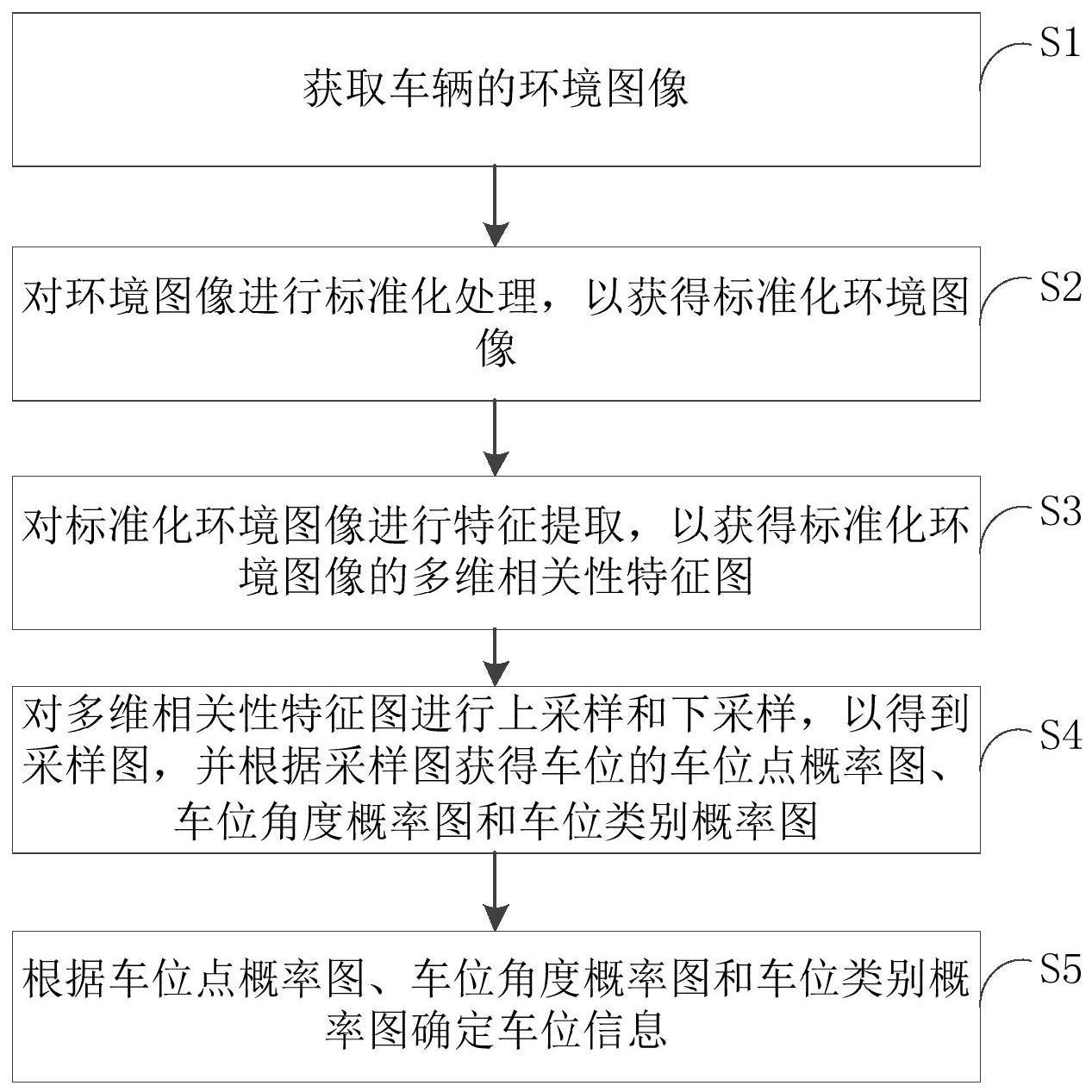
5、为达到上述目的,本发明第一方面实施例提出了一种车位识别方法,包括:获取车辆的环境图像;对环境图像进行标准化处理,以获得标准化环境图像;对标准化环境图像进行特征提取,以获得标准化环境图像的多维相关性特征图;对多维相关性特征图进行上采样和下采样,以得到采样图,并根据采样图获得车位的车位点概率图、车位角度概率图和车位类别概率图;根据车位的车位点概率图、车位角度概率图和车位类别概率图确定车位信息。
6、根据本发明实施例的车位识别方法,首先获取车辆的环境图像,并对环境图像进行标准化处理,以获得标准化环境图像,然后对标准化环境图像进行特征提取,以获得标准化环境图像的多维相关性特征图,接着对多维相关性特征图进行上采样和下采样,以得到采样图,并根据采样图获得车位的车位点概率图、车位角度概率图和车位类别概率图,最后根据车位的车位点概率图、车位角度概率图和车位类别概率图确定车位信息。由此,该方法能够有效提高车位识别的精度,且识别速度快。
7、另外,根据本发明上述实施例的车位识别方法还可以具有如下的附加技术特征:
8、根据本发明的一个实施例,对标准化环境图像进行特征提取,包括:通过三组二维卷积对标准化环境图像进行特征转换,得到三组矩阵;对三组矩阵中的两组矩阵按照预设缩放系数进行缩放处理,并获取缩放后的其中一组矩阵的转置矩阵;根据三组矩阵中的另外一组矩阵和转置矩阵确定相关性矩阵;根据相关性矩阵获得概率矩阵;根据缩放处理后的另一组矩阵和概率矩阵之间的乘积得到特征图。
9、根据本发明的一个实施例,对标准化环境图像进行特征提取,还包括:通过多个自注意力模块对标准化环境图像进行特征提取,以获取多个特征图;对多个特征图进行ln函数标准化处理;采用gelu函数将标准化处理后的多个特征图进行特征聚合,以获得标准化环境图像的多维相关性特征图。
10、根据本发明的一个实施例,对多个特征图进行ln函数标准化处理,包括:获取同一像素下不同通道的像素平均值和标准差;将多个特征图各个通道的像素值减去像素平均值后除以标准差。
11、根据本发明的一个实施例,对多维相关性特征图进行上采样和下采样,以得到采样图,包括:采用预设步长的二维卷积对多维相关性特征图进行下采样,得到多个下采样特征图,其中,多个下采样特征图为多个尺寸按照预设步长的倒数成倍递减的特征图;采用双线性插值对多个上采样特征图进行上采样,得到多个上采样特征图,其中,多个上采样特征图为多个尺寸按照预设步长的倒数成倍递增的特征图;根据上采样特征图与相同尺寸的下采样特征图进行叠加,得到采样图。
12、根据本发明的一个实施例,根据采样图获得车位的车位点概率图、车位角度概率图和车位类别概率图,包括:通过sigmoid函数对采样图进行计算,以获得车位点概率图;通过双曲正切函数对采样图进行计算,以获得车位角度概率图;通过softmax函数对采样图进行计算,以获得车位类别概率图。
13、根据本发明的一个实施例,根据车位点概率图、车位角度概率图和车位类别概率图确定车位信息,包括:根据车位点概率图确定车位的入口中心点坐标,并根据车位角度概率图确定车位的入口中心点角度,以及根据车位类别概率图确定车位类别;根据车位的入口中心点坐标、车位的入口中心点角度和车位类别对环境图像进行可视化渲染,确定车位信息。
14、根据本发明的一个实施例,根据车位点概率图确定车位的入口中心点坐标,包括:获取车位点概率图中概率值大于车位点阈值时对应的像素点,将该像素点作为车位的入口中心点坐标。
15、根据本发明的一个实施例,根据车位角度概率图确定车位的入口中心点角度,包括:获取车位角度概率图中每个像素点的正弦值,根据每个像素点的正弦值所处的范围确定车位的入口中心点角度。
16、根据本发明的一个实施例,根据车位类别概率图确定车位类别,包括:获取车位类别概率图中所有概率值;根据所有概率值中的最大概率值确定车位类别。
17、根据本发明的一个实施例,对环境图像进行标准化处理,包括:对环境图像进行归一化处理;获取环境图像在各个通道的像素平均值和标准差;将归一化处理后的环境像素减去像素平均值后除以标准差,得到标准化环境图像。
18、为达到上述目的,本发明第二方面实施例提出了一种车位识别装置,包括:获取模块,用于获取车辆的环境图像;处理模块,用于对环境图像进行标准化处理,以获得标准化环境图像;特征提取模块,用于对标准化环境图像进行特征提取,以获得标准化环境图像的多维相关性特征图;采样模块,用于对多维相关性特征图进行上采样和下采样,以得到采样图,并根据采样图获得车位的车位点概率图、车位角度概率图和车位类别概率图;确定模块,用于根据车位的车位点概率图、车位角度概率图和车位类别概率图确定车位信息。
19、根据本发明实施例的车位识别装置,获取模块获取车辆的环境图像,处理模块对环境图像进行标准化处理,以获得标准化环境图像,特征提取模块对标准化环境图像进行特征提取,以获得标准化环境图像的多维相关性特征图,采样模块对多维相关性特征图进行上采样和下采样,以得到采样图,并根据采样图获得车位的车位点概率图、车位角度概率图和车位类别概率图,确定模块根据车位的车位点概率图、车位角度概率图和车位类别概率图确定车位信息。由此,该装置能够有效提高车位识别的精度,且识别速度快。
20、为达到上述目的,本发明第三方面实施例提出了一种计算机可读存储介质,其上存储有车位识别程序,该车位识别程序处理器执行时实现上述的车位识别方法。
21、根据本发明实施例的计算机可读存储介质,通过执行时实现上述的车位识别方法,能够有效提高车位识别的精度,且识别速度快。
22、为达到上述目的,本发明第四方面实施例提出的一种车辆,包括存储器、处理器及存储在存储器上并可在处理器上运行的车位识别程序,处理器执行车位识别程序时,实现上述的车位识别方法。
23、根据本发明实施例的车辆,通过执行上述的车位识别方法,能够有效提高车位识别的精度,且识别速度快。
24、本发明附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!