同时处理风速时空信息的多点风速预测模型及方法
本发明属于风速预测,具体的为一种同时处理风速时空信息的多点风速预测模型及方法。
背景技术:
1、准确的预测短期风速(分钟~小时)对于提高风电的利用率、风电的供能稳定等方面尤为重要。随着国内陆上风电场选址越来越趋向于山地区域,而由于地形变化等因素的影响,山地区域容易产生尾流效应并出现流动分离再附、剪切流等复杂的流动现象。与此同时,风速本身还存在着较强的随机性与波动性,这种复杂的风场变化对风电场的安全平稳运行带来了巨大的挑战。在风电大规模并入电网系统的背景下,这种不稳定的供能会对电网造成一定的冲击,降低风电的经济效益,甚至出现“弃风”现象。因此,发展准确的预测短期风速的方法至关重要。
2、因描述流体运动的控制方程在时空两个维度均具有连续性,这表明流体不仅具有时间上的相关性,同时还具有空间上的相关性。风作为一种流体,具有相同的物理属性。传统的单点短期风速预测方法往往基于空间单一位置处的风速信号开展预测,忽略了不同测点之间的风速相关性,一定程度上制约了短期风速预测精度的提升。随着风速测量设备的不断更新发展以及风电场规模的扩大,对风速的测量也不再局限于单一位置,已可以实现对三维风场的实时探测,因此空间多点同步的风速测量数据得到了有效的收集与扩充。考虑到空间风速分布是受地形、风向、气温等多变量共同影响的结果,不同位置的风速信息在时间和空间上都具有一定的相关性。因此,挖掘多点位风速信息之间的时空联系是行之有效的提高风速预测精度的途径,此类方法可称为多点风速时空同步预测方法。
3、目前,常见的多点风速同步预测方法常采用深度神经网络来提取不同空间位置的测点风速时程之间的时空相关性,其基本思路是将不同空间位置的测点视为一张图片,多个连续时刻的图片进行排列,就组成了具有时空信息的数据集。对这个时空数据集进行先提取空间信息,后进行时序建模的操作,即可实现多点时空同步预测。这种空间与时间分开的建模策略,又被称为“两阶段”建模。而“两阶段”建模策略利用了测点之间蕴含的空间相关性,很大程度上提高了短期风速的预测精度,但仍存在一些问题,例如在空间信息转化为时间信息的过程中,空间信息需要被展平成一维向量输入时间模型,这个操作破坏了测点之间的空间相对位置关系,削弱了空间相关性。
技术实现思路
1、有鉴于此,为了解决现有技术“两阶段”建模策略破坏了测点之间的空间相对位置关系、削弱了空间相关性的问题,本发明的目的在于提供一种同时处理风速时空信息的多点风速预测模型及方法。
2、为达到上述目的,本发明提供如下技术方案:
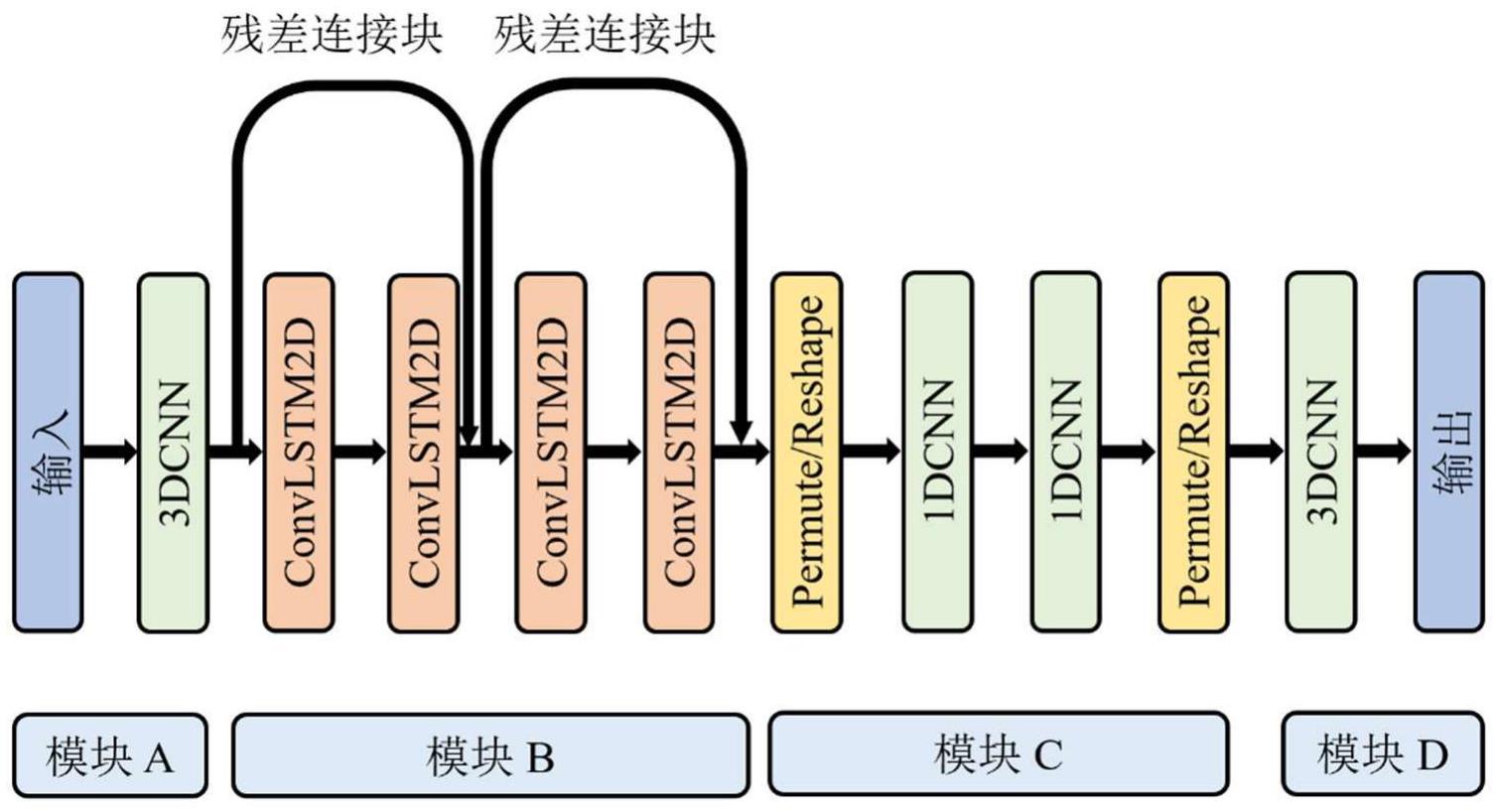
3、本发明首先提出了一种同时处理风速时空信息的多点风速预测模型,包括依次连接的:
4、模块a:包括输入层和1×1卷积的3dcnn层i,所述输入层用于输入形式为(j,x,y,fi)的四维数据;所述3dcnn层i的卷积核为(1,1,1)并用于实现特征通道fi的扩展;其中,j表示时间维度;x和y表示空间维度上两个方向的尺寸;fi表示特征通道;
5、模块b:包括依次连接的两个resnet-convlstm模块,每个resnet-convlstm模块包括两个convlstm层和一个残差连接块,用于捕捉数据中心蕴含的非线性时空信息;
6、模块c:包括两个permute/reshape层,两个permute/reshape层之间设有两个1dcnn层;与模块b相连的permute/reshape层用于调换模块b输出数据中的时间维度与特征通道维度,并将数据变形为(x×y×ff,j),其中,ff表示上一层神经网络所使用的卷积核个数;两个1dcnn层依次用于对时间维度升维和降维,使时间步长符合预测步数k;k为任意正整数;另一个permute/reshape层用于数据调换为原始顺序;
7、模块d:包括1×1卷积的3dcnn层ii和输出层,所述3dcnn层ii的卷积核个数为所需输出特征通道的个数fo,并通过输出层输出最终的时空风速预测结果。
8、进一步,所述convlstm层的原理为:
9、ft=σ(wxf*xt+whf*ht-1+bf)
10、gt=tanh(wxg*xt+whg*ht-1+bg)
11、it=σ(wxi*xt+whi*ht-1+bi)
12、ct=ft⊙ct-1+it⊙gt
13、ot=σ(wxo*xt+who*ht-1+bo)
14、yt=ht=ot⊙tanh(ct)
15、其中,t和t-1分别是当前和先前时刻;ft、gt、it和ot分别表示遗忘门的控制器、lstm网络的中间输出、输入门的控制器、输出门的控制器;其中xt为输入向量,ct为长期状态,ht为短期状态,yt为输出向量,wxf,wxg,wxi,wxo为分别与xt连接的权重矩阵,whf,whg,whi,who为分别与ht-1连接的权重矩阵,bf,bg,bi,bo为偏置项;σ(·)表示激活函数,*代表卷积层的卷积运算,⊙表示数组元素依次相乘。
16、进一步,所述残差连接块的原理为:
17、h(x)=f(x)-x
18、其中,f(x)表示残差连接块的输出;x表示残差连接块的输入;h(x)表示残差。
19、本发明还提出了一种同时处理风速时空信息的多点风速预测方法,包括如下步骤:
20、步骤一:获取原始时空风速序列,并对原始时空风速序列进行预处理,得到四维风速数据(time steps,row,column,features),其中,time steps表示四维风速数据共有多少个时刻的图片信息,代表时间维度;row和column分别代表图片的高和宽,代表空间维度;features代表风速分量的个数,代表特征通道;
21、步骤二:构建并训练如权利要求1所述的多点风速预测模型;
22、步骤三:将四维风速数据输入多点风速预测模型,得到时空风速预测结果。
23、进一步,所述步骤一中,对原始时空风速序列进行归一化处理,方法为:
24、将原始时空风速序列任意时间和位置的风速矢量分解为u,v,w三个风速分量,并分别对u,v,w三个风速分量进行归一化处理:
25、u/uref,v/uref,w/uref
26、其中,uref表示远场来流风速。
27、进一步,所述步骤二中,训练多点风速预测模型的方法为:
28、21)将经预处理后得到的四维风速数据uch按6:2:2划分训练集、验证集和测试集;
29、22)将训练集数据输入多点风速预测模型并得到时空风速预测值,计算时空风速预测值相较于时空风速真实值的损失函数;
30、23)判断损失函数是否小于设定阈值:若是,则多点风速预测模型训练完成,执行步骤26);若否,则迭代次数加1,执行步骤24);
31、24)判断迭代次数是否达到设定的最大迭代次数:若是,则多点风速预测模型训练完成,执行步骤26);若否,则执行步骤25);
32、25)更新多点风速预测模型中的超参数,执行步骤22);
33、26)分别利用验证机和测试集对多点风速预测模型的预测性能进行验证和测试。
34、进一步,所述步骤23)中,损失函数采用mape、mae或rmse。
35、进一步,所述步骤25)中,以adam为优化器更新多点风速预测模型中的超参数。
36、本发明的有益效果在于:
37、本发明同时处理风速时空信息的多点风速预测模型,通过设置依次连接的模块a、模块b、模块c和模块d,利用模块a中的1×1卷积的3dcnn层ⅰ特征通道fi维度的扩展,仅增加了特征通道的维数,并没有对空间与时间维度进行信息提取,可以尽可能的保存原始输入数据的时间与空间信息;如此,通过模块b中的两个resnet-convlstm模块可更完整地同时捕捉数据中蕴含的非线性时空信息;模块c的第一个permute/reshape层调换时间维度与特征通道维度,两个1dcnn层用于对时间维度升维和降维,使时间步长符合预测步数k,第二个permute/reshape层将数据维度调换为原始数据;最后利用模块d中的3dcnn层ⅱ将特征通道回复为输出特征通道的个数fo,从而最终得到预测结果,并具有以下优点:
38、1)克服了现有多点风速同步预测方法的“两阶段”建模策略破坏了测点之间的空间相对位置关系、削弱了空间相关性的缺点;
39、2)克服了传统多点风速同步预测方法预测的空间风速矩阵分辨率较大或需要同时预测多个风速分量(即预测三维风速矢量)时,导致参数量过多,难以训练的缺点;
40、3)通过融合convlstm、残差网络(resnet)以及1×1三维卷积各自的优点,能够同时处理风速时空信息的预测模型,不会削弱破坏测点之间的空间相对性,并能够利用四维时空风速数据开展多点风速风向同步预测的工作。
- 还没有人留言评论。精彩留言会获得点赞!