一种基于机器学习的空地无人系统作战效能评估方法
本发明涉及空地无人系统,具体而言,涉及一种基于机器学习的空地无人系统作战效能评估方法。
背景技术:
1、未未来战争必然是“一域多层、空地一体”的立体攻防战,体系与体系的对抗是其最显著的特征。空地无人系统是由空中无人机与地面无人车组成的空地异构机器人系统,空中无人机和地面无人车各有优劣,形成体系,协同运用可以将装备作战效能最大化,更好地完成使命任务。现代战争中作战理念不断更新,作战环境日趋复杂多变,因此,深入研究空地无人系统的作战效能对其作战使用具有较强的现实指导意义。
2、支持向量机(support vector machine,svm)作为机器学习的研究内容之一,在武器装备等效能评估中运用非常广泛的一种识别方法。例如,陈侠等人研究了一种基于改进型支持向量机的侦察无人机作战效能评估方法(陈侠,胡乃宽.基于改进型支持向量机的侦察无人机作战效能评估[j].火力与指挥控制,2018,43(10):31-34.);李宗晨等人研究了一种基于有监督局部保留投影(slpp)和最小二乘支持向量机(lssvm)的空战效能综合评估模型(李宗晨,姚旭,甘旭升.基于slpp-lssvm的空战效能评估研究[j].火力与指挥控制,2021,46(10):89-95.);杨健为等人以地地导弹武器系统为例,研究了一种基于差分进化支持向量机的作战效能评估方法(杨健为,徐坚,吴小役,鲁玉祥,魏继卿.基于差分进化支持向量机的作战效能评估方法[j].火炮发射与控制学报,2016,37(01):16-20.)
3、在svm训练过程中,svm的惩罚因子c和rbf核函数参数g的选择质量,直接影响最终的作战效能评估结果的精度。智能优化算法是一种有效svm模型参数优化方法。乌燕鸥优化算法(sooty tern optimization algorithm,stoa)是一种模拟乌燕鸥觅食行为的新型智能优化算法,同样可以应用于空地无人系统的作战效能评估问题。但是,乌燕鸥优化算法存仍然存在有一些缺陷,使得算法容易陷入局部最优和收敛精度不高,在进行作战效能评估时,往往达不到准确的作战效能评估效果。但是,乌燕鸥优化算法存仍然存在有一些缺陷,使得算法容易陷入局部最优和收敛精度不高,在进行作战效能评估时,往往达不到准确的作战效能评估效果。现有的乌燕鸥优化算法存在以下三个不足:
4、(1)在确定种群位置时,乌燕鸥个体的位置是随机确定的,这就使得算法具有一定的盲目性和随机性;
5、(2)乌燕鸥优化算法的位置更新是根据目标物的位置,采用螺旋进攻的方式,向最佳位置移动,但是如果只是根据最佳目标位置进行移动,很容易使乌燕鸥陷入局部最优解。
6、(3)乌燕鸥优化算法陷入局部最优解时,没有任何措施能帮助其跳出局部最优解。
7、上述3个不足,导致在采用乌燕鸥优化算法进行空地无人系统的作战效能评估时,不能达到最佳的作战效能评估效果。
技术实现思路
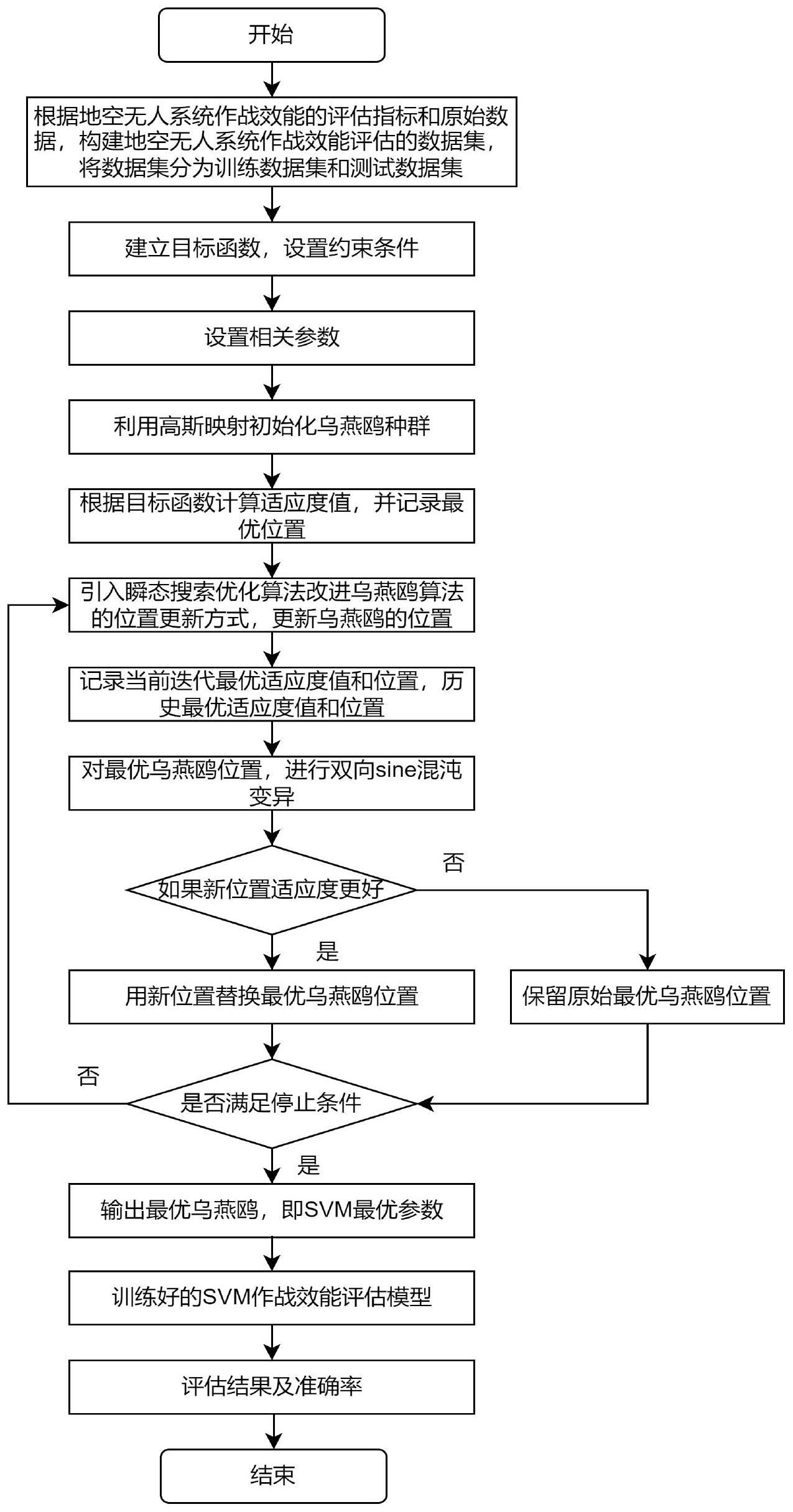
1、本发明旨针对上述问题,提出一种基于机器学习的空地无人系统作战效能评估方法,它克服了乌燕鸥优化算法存在的几点不足,能够显著提升空地无人系统作战效能评估的效果,具体而言,本发明的基于机器学习的空地无人系统作战效能评估方包括:步骤1:根据空地无人系统作战效能的评估指标和原始数据,构建空地无人系统作战效能评估的数据集,将数据集分为训练数据集和测试数据集;步骤2:建立基于改进乌燕鸥优化算法的地空无人平台作战效能评估的目标函数,同时设置相应的约束条件;步骤3:进行参数设置;步骤4:利用高斯映射初始化乌燕鸥种群位置;步骤5:计算并确定乌燕鸥的迁移行为;步骤6:计算并确定乌燕鸥的攻击行为,包括引入瞬态搜索优化算法的位置更新机制来改进乌燕鸥位置更新方式;步骤7:基于步骤2的目标函数,并基于步骤5、6的计算结果,计算当次迭代最优适应度值;步骤8:记录当次迭代中的最优乌燕鸥位置;步骤9:对于所述最优乌燕鸥位置,进行逐维度双向sine变异,得到变异后的当次迭代最优乌燕鸥位置;步骤10:记录变异后的当次迭代最优乌燕鸥位置;步骤11:重复执行步骤5~10,达到最大迭代次数后,输出最优乌燕鸥结果,即得到svm的最优参数cbest和gbest;其中,cbest为最优惩罚因子,gbest为最优rbf核函数参数;步骤12:以输出的所述最优参数为svm参数建立建立空地无人系统作战效能评估模型,并将测试数据集输入该模型中,得到空地无人系统作战效能的评估结果和评估准确率。
2、优选地是,在所述步骤2中,所述目标函数为训练数据集的5折交叉验证svm的分类准确率,所述约束条件为svm的惩罚因子c和rbf核函数参数g的上下限。
3、优选地是,在所述步骤4中,所述高斯映射初始化乌燕鸥种群位置包括:
4、高斯映射随机数产生:
5、
6、利用产生的高斯随机数初始化乌燕鸥位置:
7、ps(t)=(ub-lb)×xt+lb
8、其中,乌燕鸥寻优下边界lb;乌燕鸥寻优上边界ub,ps(t)表示当前第t次迭代的乌燕鸥的位置。
9、优选地是,所述引入瞬态搜索优化算法的位置更新机制来改进乌燕鸥位置更新方式,具体包括:
10、
11、其中:
12、ct=k·z·λ3+1
13、t=2·z·λ2-z
14、
15、
16、其中,ps(t+1)为更新后的第t+1次迭代的乌燕鸥位置;pbs(t)表示第t次迭代的最佳位置;ps(t)为当前乌燕鸥的位置;α和β为[0,1]之间的随机数;ct和t为随机的热阻系数;z为衰减系数,随着迭代次数从2逐渐减小为0;k为常数(k=0,1,2…);λ1、λ2和λ3为[0,1]内的随机数;pr1(t)、pr2(t)和pr3(t)是表示第t次迭代时随机选择的三个乌燕鸥个体,r1≠r2≠r3;pavg(t)是pr1(t)、pr2(t)和pr3(t)的平均值。
17、优选地是,,所述计算当次迭代最优适应度值采用如下公式:
18、fitness(t)=ff(ps(t+1))
19、式中,ff(·)为计算适应度值时的适应度函数。
20、优选地是,所述进行逐维度双向sine变异的步骤包括:
21、sinvalue=sin(πx0)
22、
23、然后对当次最优位置进行变异扰动
24、pbs(j)(t+1)'=pbs(j)(t+1)+sinvalue×pbs(j)(t+1)
25、式中:pbs(j)(t+1)表示第t+1次迭代的最优位置pbs(t+1)的第j维。
26、优选地是,所述进行逐维度双向sine变异的步骤还包括判断新位置适应度是否更好,采用下式:
27、
28、如果新位置适应度更好,则用新位置替换当次最优乌燕鸥位置,如果不是,保留原始最优乌燕鸥位置。
29、优选地是,在所述计算并确定乌燕鸥的迁移行为步骤中,包括冲突避免,聚集和更新。
- 还没有人留言评论。精彩留言会获得点赞!