覆盖有软组织的硬组织的配准方法、装置及系统与流程
本说明书涉及医疗设备,特别涉及覆盖有软组织的硬组织的配准方法、装置及系统。
背景技术:
1、手术导航,是将患者术前或术中影像数据与手术床上患者的解剖结构准确对应,手术中跟踪手术器械并将手术器械的位置在患者影像上以虚拟探针的形式实时更新显示,使医生对手术器械相对患者解剖结构的位置一目了然,使外科手术更快速、更精确、更安全。例如,全膝关节置换手术中,手术导航技术将患者术中的股骨或胫骨与术前ct影像生成的三维模型进行配准,辅助医生确定截骨位置。实现“将患者术前或术中影像数据与手术床上患者的解剖结构准确对应”的操作称为配准。配准是实现手术导航的关键步骤。
2、对于硬组织的配准方案,现有方法是利用硬组织表面的形状特征进行配准,通常需要医生在术中选取硬组织表面上一定数量的特征点(如图1所示,其中的点即为特征点),并采用探针刺穿特征点处的软骨,从而获取到特征点处“硬骨”表面的坐标,将“硬骨”表面的坐标与影像中的骨表面坐标进行配准。
3、由于特征点的数量决定了配准的精度,因此现有方法需要在较多数量(例如十几个、二十几个)的特征点处刺穿软骨,这就导致医生采集硬组织表面坐标的工作量较大。
技术实现思路
1、本技术实施方式的目的是提供覆盖有软组织的硬组织的配准方法、装置及系统,以解决现有配准方法的效率较低的问题。
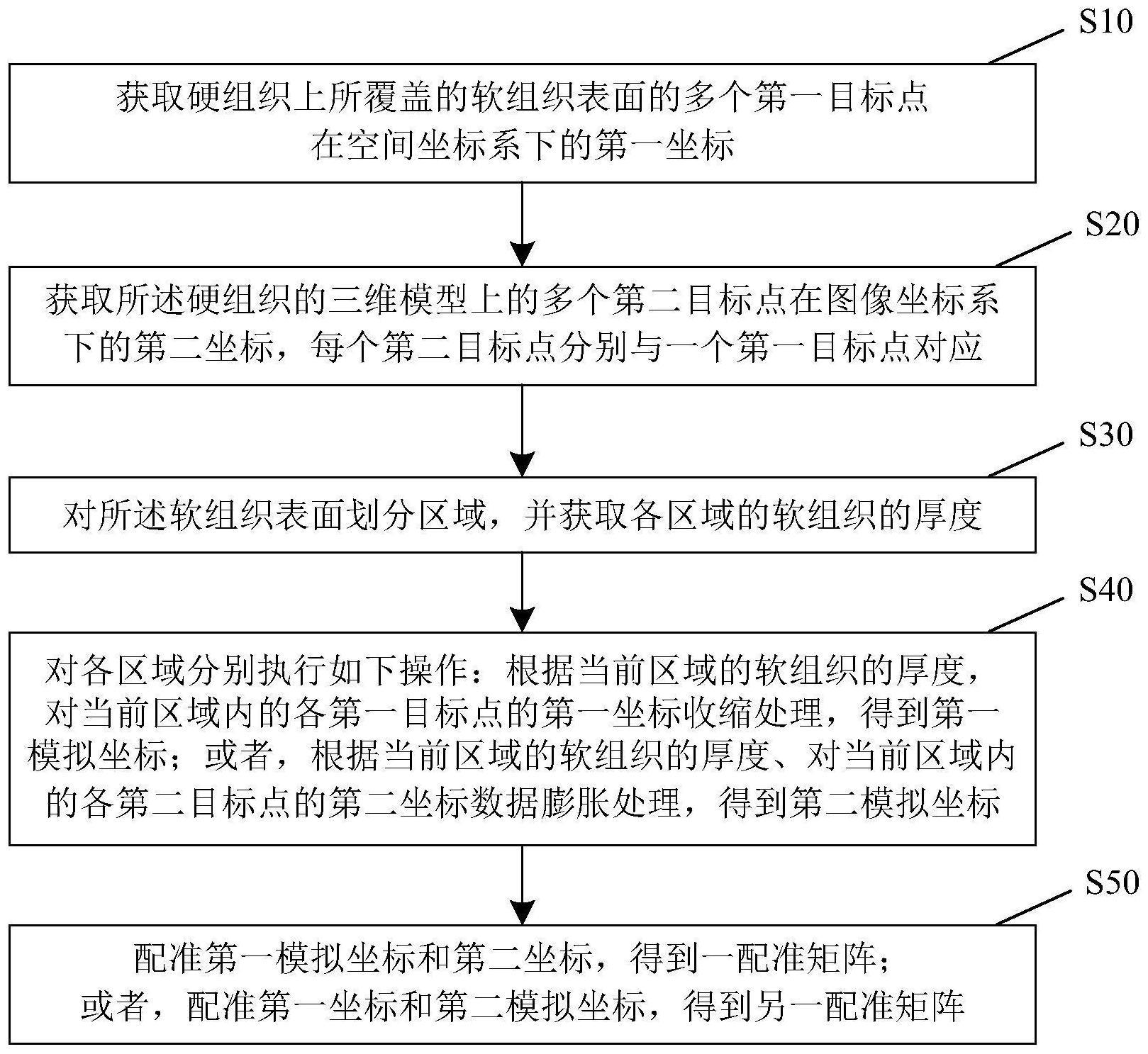
2、本说明书第一方面提供一种覆盖有软组织的硬组织的配准方法,包括:获取硬组织上所覆盖的软组织表面的多个第一目标点在空间坐标系下的第一坐标;获取所述硬组织的三维模型上的多个第二目标点在图像坐标系下的第二坐标,每个第二目标点分别与一个第一目标点对应;对所述软组织表面划分区域,并获取各区域的软组织的厚度;对各区域分别执行如下操作:根据当前区域的软组织的厚度,对当前区域内的各第一目标点的第一坐标收缩处理,得到第一模拟坐标;或者,根据当前区域的软组织的厚度、对当前区域内的各第二目标点的第二坐标数据膨胀处理,得到第二模拟坐标;配准第一模拟坐标和第二坐标,得到一配准矩阵;或者,配准第一坐标和第二模拟坐标,得到另一配准矩阵。
3、在一些实施例中,对所述软组织表面划分区域,并获取各区域的软组织的厚度,包括:将所述软组织表面划分成多个区域;在每个区域中选取特征点,并探测各特征点处的软组织厚度,将各区域中特征点处的软组织厚度作为对应区域的软组织厚度。
4、在一些实施例中,对所述软组织表面划分区域,并获取各区域的软组织的厚度,包括:在所述软组织表面选取多个特征点;探测各特征点处的软组织的厚度;对各特征点执行以下操作:将覆盖有软组织的硬组织表面上以当前特征点为中心、预定距离为半径的范围作为一个区域,并将当前特征点处的软组织的厚度作为所述区域的厚度。
5、在一些实施例中,在对各特征点执行以下操作:将以当前特征点为中心、预定距离为半径的范围作为一个区域,并将当前特征点处的软组织的厚度作为所述区域的厚度之后,还包括:获取覆盖有软组织的硬组织表面上的交叉区域;根据形成所述交叉区域的各区域对应的软组织厚度,确定所述交叉区域的软组织的厚度。
6、在一些实施例中,探测各特征点处的软组织的厚度,包括:对各特征点分别执行如下操作:在探针尖端接触当前特征点处的软组织表面时,采集探针尖端的第一数据;在探针尖端穿过软组织表面且接触硬组织时,采集探针尖端的第二数据;根据所述第一数据和所述第二数据计算所述特征点处的软组织的厚度。
7、在一些实施例中,根据当前区域的软组织的厚度,对当前区域内的各第一目标点的第一坐标收缩处理,得到第一模拟坐标,包括:对当前区域内的各第一目标点分别执行如下操作:根据当前第一目标点及周边的多个第一目标点确定第一虚拟平面,并确定所述第一虚拟平面的第一法线;将当前第一目标点的第一坐标沿所述第一法线方向朝向所述硬组织的质心收缩,得到第一模拟坐标,其中收缩的距离等于当前区域的软组织的厚度。
8、在一些实施例中,根据当前区域的软组织的厚度、对当前区域内的各第二目标点的第二坐标数据膨胀处理,得到第二模拟坐标,包括:对当前区域的各第二目标点分别执行如下操作:根据当前第二目标点及周边的多个第二对应点确定第二虚拟平面,并确定所述第二虚拟平面的第二法线;将当前第二目标点的第二坐标沿所述第二法线的方向朝向远离所述硬组织的质心的方向膨胀,得到第二模拟坐标,其中膨胀的距离等于当前区域的软组织的厚度。
9、本说明书第二方面提供一种覆盖有软组织的硬组织的配准装置,包括:第一获取单元,用于获取硬组织上所覆盖的软组织表面的多个第一目标点在空间坐标系下的第一坐标;第二获取单元,用于获取所述硬组织的三维模型上的多个第二目标点在图像坐标系下的第二坐标,每个第二目标点分别与一个第一目标点对应;第三获取单元,用于对所述软组织表面划分区域,并获取各区域的软组织的厚度;处理单元,用于对各区域分别执行如下操作:根据当前区域的软组织的厚度,对当前区域内的各第一目标点的第一坐标收缩处理,得到第一模拟坐标;或者,根据当前区域的软组织的厚度、对当前区域内的各第二目标点的第二坐标数据膨胀处理,得到第二模拟坐标;第一配准单元,用于配准第一模拟坐标和第二坐标,得到配准矩阵;或者,配准第一坐标和第二模拟坐标,得到配准矩阵。
10、在一些实施例中,所述第三获取单元包括:划分子单元,用于将所述软组织表面划分成多个区域;第一探测子单元,用于在每个区域中选取特征点,并探测各特征点处的软组织厚度,将各区域中特征点处的软组织厚度作为对应区域的软组织厚度。
11、在一些实施例中,所述第三获取单元包括:选取子单元,用于在所述软组织表面选取多个特征点;第二探测子单元,用于探测各特征点处的软组织的厚度;第一确定子单元,用于对各特征点执行以下操作:将覆盖有软组织的硬组织表面上以当前特征点为中心、预定距离为半径的范围作为一个区域,并将当前特征点处的软组织的厚度作为所述区域的厚度。
12、在一些实施例中,所述第三获取单元还包括:获取子单元,用于获取覆盖有软组织的硬组织表面上的交叉区域;第二确定子单元,用于根据形成所述交叉区域的各区域对应的软组织厚度,确定所述交叉区域的软组织的厚度。
13、在一些实施例中,所述第一探测子单元和/或所述第二探测子单元,对各特征点分别执行如下操作:在探针尖端接触当前特征点处的软组织表面时,采集探针尖端的第一数据;在探针尖端穿过软组织表面且接触硬组织时,采集探针尖端的第二数据;根据所述第一数据和所述第二数据计算所述特征点处的软组织的厚度。
14、在一些实施例中,根据当前区域的软组织的厚度,对当前区域内的各第一目标点的第一坐标收缩处理,得到第一模拟坐标,包括:对当前区域内的各第一目标点分别执行如下操作:根据当前第一目标点及周边的多个第一目标点确定第一虚拟平面,并确定所述第一虚拟平面的第一法线;将当前第一目标点的第一坐标沿所述第一法线方向朝向所述硬组织的质心收缩,得到第一模拟坐标,其中收缩的距离等于当前区域的软组织的厚度。
15、在一些实施例中,根据当前区域的软组织的厚度、对当前区域内的各第二目标点的第二坐标数据膨胀处理,得到第二模拟坐标,包括:对当前区域的各第二目标点分别执行如下操作:根据当前第二目标点及周边的多个第二对应点确定第二虚拟平面,并确定所述第二虚拟平面的第二法线;将当前第二目标点的第二坐标沿所述第二法线的方向朝向远离所述硬组织的质心的方向膨胀,得到第二模拟坐标,其中膨胀的距离等于当前区域的软组织的厚度。
16、本说明书第二方面提供一种覆盖有软组织的硬组织的配准装置,包括:
17、第一获取单元,用于获取硬组织上所覆盖的软组织表面的多个第一目标点在空间坐标系下的第一坐标;
18、第二获取单元,用于获取所述硬组织的三维模型上的多个第二目标点在图像坐标系下的第二坐标,每个第二目标点分别与一个第一目标点对应;
19、第三获取单元,用于对所述软组织表面划分区域,并获取各区域的软组织的厚度;
20、处理单元,用于对各区域分别执行如下操作:根据当前区域的软组织的厚度,对当前区域内的各第一目标点的第一坐标收缩处理,得到第一模拟坐标;或者,根据当前区域的软组织的厚度、对当前区域内的各第二目标点的第二坐标数据膨胀处理,得到第二模拟坐标;
21、第一配准单元,用于配准第一模拟坐标和第二坐标,得到配准矩阵;或者,配准第一坐标和第二模拟坐标,得到配准矩阵。
22、本说明书第三方面提供一种图像台车,执行第一方面任一项所述的覆有软组织的硬组织的配准方法。
23、本说明书第四方面提供一种覆盖有软组织的硬组织的配准系统,包括:探针及光学追踪系统,用于获取空间坐标系下软组织表面点云中各目标点的坐标;控制器,用于执行第一方面任一项所述的硬组织的配准方法。
24、本说明书提供的覆盖有软组织的硬组织的配准方法、装置及系统,针对覆盖有软骨的硬组织,基于手术中获取的软组织实体表面的多个第一目标点在空间坐标系下的第一坐标、三维模型图像中硬组织表面的多个第二坐标点在图像坐标系下的第二坐标和分区域获取的软组织厚度进行配准,无需在软组织表面大面积穿刺以获取软组织的厚度,在每个区域只需要选取一个特征点进行穿刺以获取软组织“厚度”即可,需要穿刺的特征点数量显著减少,降低了医生采集在硬组织表面进行数据采集的工作量。此外,需要配准的点的数量也相应较少,降低了配准计算的难度。
- 还没有人留言评论。精彩留言会获得点赞!