一种基于CCD相机的产品定位方法与流程
一种基于ccd相机的产品定位方法
技术领域
1.本发明涉及芯片定位技术领域,尤其涉及基于ccd相机的产品定位方法。
背景技术:
2.现有技术中,通过ccd相机对放料台中的例如芯片位置进行拍照定位,确定料盒中是否有芯片,以及芯片的具体位置的定位方法通常需要保证ccd相机与芯片静止不动才能够实现精确定位,然后在满足ccd相机与芯片静止不动的条件下对芯片位置进行定位会影响效率。如果ccd相机一边运动一边拍摄则可以提高效率,然而ccd相机如果一边运动一边拍摄,会由于运动速度快以及信号传输的延时,导致实际拍摄地址与期望的拍摄地址有偏移。
技术实现要素:
3.本发明的目的在于提供一种基于ccd相机的产品定位方法,其旨在解决现有的ccd相机定位方法不能同时兼顾精确定位和高效率的技术问题。
4.为达到上述目的,本发明提供的方案是:
5.根据产品位置设定第一预设位置;
6.根据第一预设位置、ccd相机的运动速度以及ccd相机的反应速度设定第二预设位置,所述第二预设位置表示为:
7.s
′
=-vt
[0008][0009]
式中,s表示第一预设位置,s
′
表示第二预设位置,t表示为反应时间,x表示提前量,δt为0.01s;
[0010]
使ccd相机移动,直至ccd相机移动到所述第二预设位置,ccd相机启动,且ccd相机的爆闪光源启动;
[0011]
使ccd相机继续移动,直至ccd相机移动到所述第一预设位置,ccd相机开始拍摄,获取定位图像;
[0012]
根据所述定位图像判断产品位置是否有产品以及产品的图像坐标。
[0013]
优选地,通过传感器感应ccd相机的位置,从而判断ccd相机是否移动到所述第二预设位置,以及判断ccd相机是否移动到所述第一预设位置。
[0014]
优选地,所述传感器为红外传感器或者磁性传感器或者编码器。
[0015]
优选地,ccd相机安装在运动机构上,所述运动机构带动ccd相机移动。
[0016]
优选地,根据所述定位图像判断产品位置是否有产品以及产品的坐标的方法包括判断所述定位图像中是否存在产品,若否,则判定无产品,若是,则进一步确定产品的图像坐标。
[0017]
优选地,确定产品的图像坐标的方法包括:
[0018]
通过标定板标定ccd相机以将所述定位图像的像素坐标映射到实际毫米级坐标;
[0019]
将所述定位图像的中心点映射到所述运动机构的坐标,以获得所述定位图像任意像素点转换到所述运动机构的坐标,并根据转换后的坐标确定产品的图像坐标。
[0020]
优选地,还包括:在使ccd相机移动前实施以下步骤:在产品位置附近设置辅助定位点,并记录所述辅助定位点的实际坐标;确定所述产品的图像坐标的方法还包括:
[0021]
在所述定位图像中找到辅助定位点,并计算得到辅助定位点的图像坐标;
[0022]
比较辅助定位点的图像坐标和辅助定位点的实际坐标,得到辅助定位点的偏移量,从而得到定位图像的偏移量;
[0023]
将产品的图像坐标减去偏移量得到产品的实际坐标。
[0024]
本发明提供的基于ccd相机的产品定位方法根据第一预设位置、ccd相机的运动速度以及ccd相机的反应速度设定第二预设位置,使得ccd相机在运动到第二预设位置时,提前进行启动,启动后ccd相机继续运动,直至到达根据产品位置设定的第一预设位置,该位置刚好为最佳拍摄位置,ccd相机开始拍摄,该方法通过提前触发ccd相机,然后在最佳拍摄位置拍摄,使得ccd相机在运动过程中仍能够对产品进行精确定位,从而打破了需要保持ccd相机与产品静止不动的限定,而通过运动的ccd相机对产品定位能够提高效率,即通过该方法对产品进行定位能够同时兼顾高定位精度和高效率。
附图说明
[0025]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图示出的结构获得其他的附图。
[0026]
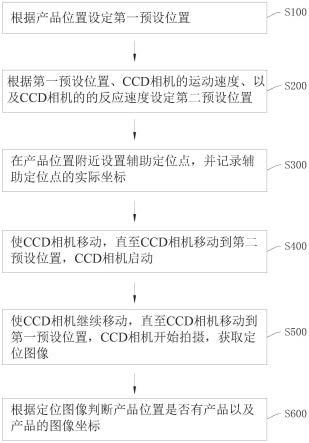
图1是本发明实施例提供的基于ccd相机的产品定位方法。
具体实施方式
[0027]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0028]
需要说明,本发明实施例中所有方向性指示(诸如上、下、左、右、前、后
……
)仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
[0029]
还需要说明的是,当元件被称为“固定于”或“设置于”另一个元件上时,它可以直接在另一个元件上或者可能同时存在居中元件。当一个元件被称为是“连接”另一个元件,它可以是直接连接另一个元件或者可能同时存在居中元件。
[0030]
另外,在本发明中涉及“第一”、“第二”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。另外,各个实施例之间的技术方案可
以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本发明要求的保护范围之内。
[0031]
如图1所示,其为本发明的一种实施例的基于ccd相机的产品定位方法,该方法通过ccd相机对放料台中的产品位置进行拍照定位,确定料盒中是否有产品(例如芯片),以及产品的具体位置。
[0032]
请参阅图1所示,本发明实施例的基于ccd相机的产品定位方法包括:
[0033]
步骤s100,根据产品位置设定第一预设位置;
[0034]
步骤s200,根据第一预设位置、ccd相机的运动速度以及ccd相机的反应速度设定第二预设位置,所述第二预设位置表示为:
[0035]s′
=-vt
[0036][0037]
式中,s表示第一预设位置,s
′
表示第二预设位置,t表示为反应时间,x表示提前量,δt为0.01s;
[0038]
步骤s400,使ccd相机移动,直至ccd相机移动到第二预设位置,ccd相机启动,且ccd相机的爆闪光源启动;
[0039]
步骤s500,使ccd相机继续移动,直至ccd相机移动到第一预设位置,ccd相机开始拍摄,获取定位图像;
[0040]
步骤s600,根据定位图像判断产品位置是否有产品以及产品的图像坐标。
[0041]
可以理解地,第一预设位置即为产品位置,上述产品位置为放料台中的产品位置,即产品本应该放置的位置,但是在实际生产中,由于芯片太小,在料盘中的位置有可能发生偏移,因此需要通过ccd相机拍照确定其精确位置坐标。需要说明的是,ccd相机的爆闪光源功率为30瓦,电压为24v,光源亮度约60000lux。
[0042]
需要说明的是,可以通过传感器感应ccd相机的位置,从而判断ccd相机是否移动到第二预设位置,是否移动到第一预设位置。
[0043]
传感器通过plc与ccd相机通信,当传感器感应到ccd相机移动到第二预设位置,传感器反馈给plc,plc输出命令给ccd相机,ccd相机启动,同时ccd相机的爆闪光源同时启动,当传感器感应到ccd相机移动到第一预设位置,传感器反馈给plc,plc输出命令给ccd相机,ccd相机开始拍摄。
[0044]
传感器为红外传感器或者磁性传感器或者编码器或者其他传感器。
[0045]
红外传感器或者磁性传感器设置在ccd相机的运动的路径上。
[0046]
需要说明的是,ccd相机安装在运动机构上,运动机构带动ccd相机移动,如果在ccd相机经过的路径上,无法安装传感器,则通过设置在运动机构上的编码器进行对比输出,设置触发坐标,即第二预设位置,当运动机构运动到该坐标时进行触发相机启动。
[0047]
需要说明的是,红外传感器或者磁性传感器适用于运动机构以固定路径在料盘上方运动的情况下,如果运动机构随机在料盘上方运动,则需要通过设置在运动机构上的编码器进行对比输出,设置触发坐标,即第二预设位置,当运动机构运动到该坐标时进行触发
相机启动。
[0048]
可选地,运动机构通过伺服马达进行驱动,编码器为马达的转动指示器,通过plc控制马达的转动圈数,进而控制运动机构的位置。
[0049]
本发明实施例的基于ccd相机的产品定位方法根据第一预设位置、ccd相机的运动速度以及ccd相机的反应速度设定第二预设位置,使得ccd相机在运动到第二预设位置时,提前进行启动,且ccd相机的爆闪光源同时启动,启动后ccd相机继续运动,直至到达根据产品位置设定的第一预设位置,该位置刚好为最佳拍摄位置,ccd相机开始拍摄,ccd相机从第二预设位置运动到第一预设位置的时间为信号传输与反应时间,该方法通过提前触发ccd相机,然后在最佳拍摄位置拍摄,使得ccd相机在运动过程中仍能够对产品进行精确定位,从而打破了需要保持ccd相机与产品静止不动的限定,而通过运动的ccd相机对产品定位能够提高效率,即通过该方法对产品进行定位能够同时兼顾高定位精度和高效率。而且,ccd相机启动的同时,ccd相机的爆闪光源启动,使得ccd相机在第一预设位置拍摄时,为ccd相机提供瞬间超高亮度,使拍到的定位图像更清晰。
[0050]
优选地,根据定位图像判断产品位置是否有产品以及产品的坐标的方法包括判断定位图像中是否存在产品,若否,则判定无产品,若是,则进一步确定产品的图像坐标。
[0051]
优选地,确定产品的图像坐标的方法包括:
[0052]
通过标定板标定ccd相机以将定位图像的像素坐标映射到实际毫米级坐标;
[0053]
将定位图像的中心点映射到运动机构的坐标,以获得定位图像任意像素点转换到运动机构的坐标,并根据转换后的坐标确定产品的图像坐标。
[0054]
进一步地,基于ccd相机的产品定位方法还包括:
[0055]
在使ccd相机移动前实施以下步骤:步骤s300,在产品位置附近设置辅助定位点,并记录辅助定位点的实际坐标;
[0056]
确定产品的图像坐标的方法还包括:
[0057]
在定位图像中找到辅助定位点,并计算得到辅助定位点的图像坐标;
[0058]
比较辅助定位点的图像坐标和辅助定位点的实际坐标,得到辅助定位点的偏移量,从而得到定位图像的偏移量;
[0059]
将产品的图像坐标减去偏移量得到产品的实际坐标。
[0060]
该方法中,通过埋设辅助定位点来对定位图像的坐标进行二次校准,能够进一步提高定位精度,能够避免ccd相机拍照的不稳定。
[0061]
以上所述仅为本发明的优选实施例,并非因此限制本发明的专利范围,凡是在本发明的发明构思下,利用本发明说明书及附图内容所作的等效结构变换,或直接/间接运用在其他相关的技术领域均包括在本发明的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1