一种直升机辅助着舰装置载荷计算方法及装置与流程
本发明属于综合强度领域,涉及一种直升机辅助着舰装置载荷计算方法及装置。
背景技术:
1、辅助着舰装置可辅助直升机快速系留和回收,通过快速捕捉固定直升机机腹下伸出的探杆实现系留。目前尚无公开的专利或论文介绍相关方法。
技术实现思路
1、本发明的目的:提供一种直升机辅助着舰装置载荷计算方法及装置,为强度计算提供设计依据。
2、技术方案:
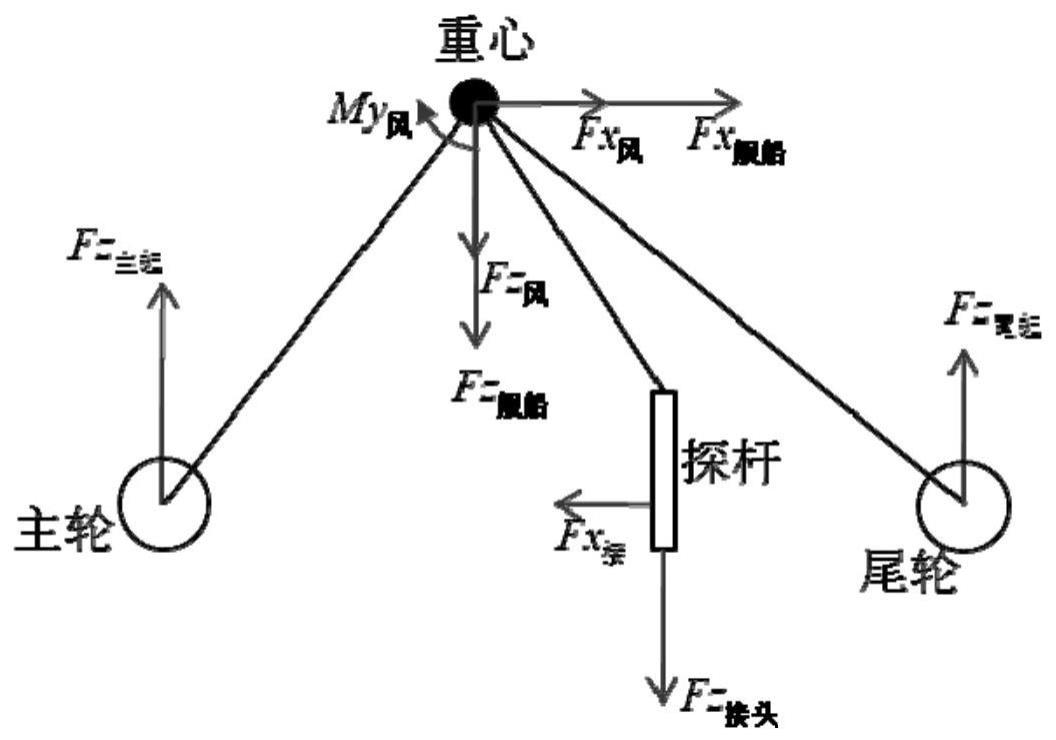
3、一种直升机辅助着舰装置载荷计算方法,直升机在甲板停稳后,舰面装置对探杆下端进行固定,直升机受到的外载包括重力,舰船运动引起的惯性载荷和风载;支反力由轮胎和辅助着舰装置提供;所有摩擦力均由主机轮承担,尾机轮为转向轮不承担摩擦力;该方法包括:
4、对固定后的直升机进行受力分析,建立载荷的平衡方程;
5、依据载荷的平衡方程,求解直升机辅助着舰装置载荷。
6、建立载荷的平衡方程之前,所述方法还包括:
7、判断直升机是否存在倾覆的可能。
8、对固定后的直升机进行受力分析,建立载荷的平衡方程,包括:
9、直升机处于倾覆极限状态时,以一侧的主起落架垂向载荷为0,探杆对直升机有垂向载荷为条件,建立载荷的平衡方程;
10、求解平衡方程,得到探杆下端航向载荷fx接头、探杆下端侧向载荷fy接头、探杆下端垂向载荷fz接头;
11、载荷的平衡方程为:
12、fx=0:fx接头+fx舰船+fx风=0;
13、fy=0:fy接头+fz左主起+fz右主起+fy舰船+fy风=0;
14、fz=0:fz接头+fz左主起+fz右主起+fz尾起+fz舰船+fz风=0;
15、mx=0:(y接头-y主起)fz接头+(y重心-y主起)(fz舰船+fz风)-(z重心-z主起)(fy舰船+fy风)+mx风+(y尾起-y主起)fz尾起=0;
16、
17、
18、其中,直升机航向载荷fx包括fx接头,舰船运动导致的航向惯性载荷fx舰船和航向风载fx风;直升机侧向载荷fy包括fy接头,舰船运动导致的侧向惯性载荷fy舰船和侧向风载fy风,主起摩擦力fy主起,直升机垂向载荷fz包括fz接头,舰船运动导致的垂向惯性载荷fz舰船和垂向风载fz风,主起垂向载荷fz主起,尾起垂向载荷fz尾起;mx风,my风和mz风分别表示风载力矩在航向,侧向和垂向的分量,风载力矩作用点已转换到重心处;x接头和y接头分别表示辅助着舰探杆装置的航向坐标和侧向坐标;x主起,y主起和z主起分别表示受压侧主起的航向坐标、侧向坐标和垂向坐标;x尾起和y尾起分别表示尾起的航向坐标和侧向坐标;x重心,y重心和z重心分别表示重心的航向坐标、侧向坐标和垂向坐标;mx、my、mz为直升机航向、侧向、垂向的力矩。
19、对固定后的直升机进行受力分析,建立载荷的平衡方程,包括:
20、直升机无倾覆风险时,以左右两侧主起落架均承受垂向载荷,探杆对直升机无垂向载荷为条件,建立载荷的平衡方程;
21、求解平衡方程,得到探杆下端航向载荷fx接头、探杆下端侧向载荷fy接头、探杆下端垂向载荷fz接头;
22、fx=0:fx接头+fx舰船+fx风=0;
23、fy=0:fy接头+fy主起+fy舰船+fy风=0;
24、fz=0:fz左主起+fz右主起+fz尾起+fz舰船+fz风=0;
25、
26、
27、
28、fy左主起=fy右主起=fy主起/2;
29、其中,直升机航向载荷fx包括装置航向载荷fx接头,舰船运动导致的航向惯性载荷fx舰船和航向风载fx风;直升机侧向载荷fy包括装置侧向载荷fy接头,舰船运动导致的侧向惯性载荷fy舰船和侧向风载fy风,主起摩擦力fy主起;直升机垂向载荷fz包括舰船运动导致的垂向惯性载荷fz舰船和垂向风载fz风,左侧主起垂向载荷fz左主起,右侧主起垂向载荷fz右主起,尾起垂向载荷fz尾起。
30、一种直升机辅助着舰装置载荷计算装置,直升机在甲板停稳后,舰面装置对探杆下端进行固定,直升机受到的外载包括重力,舰船运动引起的惯性载荷和风载;支反力由轮胎和辅助着舰装置提供;所有摩擦力均由主机轮承担,尾机轮为转向轮不承担摩擦力;该装置包括:
31、建立模块,用于对固定后的直升机进行受力分析,建立载荷的平衡方程;
32、求解模块,用于依据载荷的平衡方程,求解直升机辅助着舰装置载荷。
33、所述装置还包括:
34、判断模块,用于判断直升机是否存在倾覆的可能。
35、建立模块具体用于:
36、直升机处于倾覆极限状态时,以一侧的主起落架垂向载荷为0,探杆对直升机有垂向载荷为条件,建立载荷的平衡方程;
37、求解平衡方程,得到探杆下端航向载荷fx接头、探杆下端侧向载荷fy接头、探杆下端垂向载荷fz接头;
38、载荷的平衡方程为:
39、fx=0:fx接头+fx舰船+fx风=0;
40、fy=0:fy接头+fz左主起+fz右主起+fy舰船+fy风=0;
41、fz=0:fz接头+fz左主起+fz右主起+fz尾起+fz舰船+fz风=0;
42、
43、
44、
45、其中,直升机航向载荷fx包括fx接头,舰船运动导致的航向惯性载荷fx舰船和航向风载fx风;直升机侧向载荷fy包括fy接头,舰船运动导致的侧向惯性载荷fy舰船和侧向风载fy风,主起摩擦力fy主起,直升机垂向载荷fz包括fz接头,舰船运动导致的垂向惯性载荷fz舰船和垂向风载fz风,主起垂向载荷fz主起,尾起垂向载荷fz尾起;mx风,my风和mz风分别表示风载力矩在航向,侧向和垂向的分量,风载力矩作用点已转换到重心处;x接头和y接头分别表示辅助着舰探杆装置的航向坐标和侧向坐标;x主起,y主起和z主起分别表示受压侧主起的航向坐标、侧向坐标和垂向坐标;x尾起和y尾起分别表示尾起的航向坐标和侧向坐标;x重心,y重心和z重心分别表示重心的航向坐标、侧向坐标和垂向坐标;mx、my、mz为直升机航向、侧向、垂向的力矩。
46、建立模块还用于:
47、直升机无倾覆风险时,以左右两侧主起落架均承受垂向载荷,探杆对直升机无垂向载荷为条件,建立载荷的平衡方程;
48、求解平衡方程,得到探杆下端航向载荷fx接头、探杆下端侧向载荷fy接头、探杆下端垂向载荷fz接头;
49、fx=0:fx接头+fx舰船+fx风=0;
50、fy=0:fy接头+fy主起+fy舰船+fy风=0;
51、fz=0:fz左主起+fz右主起+fz尾起+fz舰船+fz风=0;
52、
53、
54、
55、fy左主起=fy右主起=fy主起/2;
56、其中,直升机航向载荷fx包括装置航向载荷fx接头,舰船运动导致的航向惯性载荷fx舰船和航向风载fx风;直升机侧向载荷fy包括装置侧向载荷fy接头,舰船运动导致的侧向惯性载荷fy舰船和侧向风载fy风,主起摩擦力fy主起;直升机垂向载荷fz包括舰船运动导致的垂向惯性载荷fz舰船和垂向风载fz风,左侧主起垂向载荷fz左主起,右侧主起垂向载荷fz右主起,尾起垂向载荷fz尾起。
57、本发明的有益效果:本方法可准确计算直升机辅助着舰装置载荷,可以为直升机强度设计提供输入。
- 还没有人留言评论。精彩留言会获得点赞!