一种通过无人集卡自车感知的水平空箱区作业方法与流程
本发明属于运输车辆的自动作业,特别涉及一种一种通过无人集卡自车感知的水平空箱区作业方法。
背景技术:
1、港口作为海上国门,是重要的交通基础设施,一直以来为国家经济建设和对外贸易的发展提供了强有力的支撑。
2、同时,随着港口业务的不断扩大,港口自动化、无人化已成为减少成本、提高港口作业效率的必然趋势。在港口集装箱堆场中,有重箱区和空箱区两种不同的箱区。重箱区由于重量较大,只能依靠大型机械如龙门吊进行装卸箱作业。空箱区重量不大,采用灵活度更高且价格更低的堆高机即可进行装卸箱作业。目前,依靠地图定位、车端感知识别、云计算以及无线通信等技术,无人集卡已经可以实现在港口龙门吊区场景进行装卸箱自动化作业。而基于堆高机进行空箱区装卸箱作业的系统和流程自动化程度还不够高。
3、港口堆箱区、码头面等作业任务具有强规则作业属性,环境车道线清晰、直道巡线规则单一,龙门吊/岸桥吊特征显著,作业交互方式明确。而空箱区作业任务不同于堆箱区、码头面,具有两大难点:
4、1.场地作业场景复杂,属于弱规则性;
5、2.堆高机交互为人工交互,属于弱自动化;
6、现有技术中,弱规则性表现为非结构化道路无车道线,堆高机装卸箱特征各异,不同箱型作业交互方式不一,混流场景车流复杂,这些都给无人集卡单车智能提出很高挑战。而堆高机弱自动化主要体现在,堆高机与集卡交互时主要靠喇叭提醒或人工语音指挥,此类非常规化自动化的操作给无人集卡交互提出新的难点。或者通过智能化改造后的堆高机在进行作业以后,向港口调度系统上发已完成作业信号,港口调度系统再向无人集卡下发可驶离信号,无人集卡接收到信号后再起步驶离。然而,堆高机智能化改造需要时间和成本,一些港口暂未具备这样的条件,所以还是需要人工介入来确认作业完成,无人集卡再驶离作业箱区,这不仅影响了作业效率,而且无人集卡需要配备驾驶员或安全员,增加了人工成本。
7、故目前港口空箱区装卸箱作业,存在以下缺陷:
8、作业场景弱规则化,整套作业流程弱规则化。
9、需要对堆高机进行改造使其获得与港口调度系统或者无人集卡的通信交互能力、定位能力,人机交互能力,进行这些改造需要时间和成本;需要强绑定对应的堆高机,大大降低了堆高机的灵活度。
10、无人集卡仍需人工参与,增加了人工成本;或者堆高机人工与港口调度系统交互,增加人工误操作风险。
11、公开于该背景技术部分的信息仅仅旨在增加对本发明的总体背景的理解,而不应当被视为承认或以任何形式暗示该信息构成已为本领域一般技术人员所公知的现有技术。
技术实现思路
1、本发明的目的在于提供一种无人集卡空箱区全自动化作业系统,从而克服上述现有技术中的缺陷。
2、为实现上述目的,本发明提供了一种无人集卡空箱区全自动化作业系统,安装在无人集卡上,其特征在于,包括:通信模块,用于无人集卡能够与码头操作系统tos进行实时信息交互;
3、高精定位模块,用于无人集卡能够实时获取自身位置信息;
4、路径规划模块,用于根据获取的目标位置进行车辆到终点的全局路径规划,并且根据实时的环境信息进行局部路径规划;
5、感知模块,通过对堆高机这类目标物进行大量的数据训练能够稳定识别堆高机是否抓箱、检测出堆高机距离无人集卡的距离;
6、所述通讯模块与远程监控通讯连接,用于协助远程监控实时观察堆高机抓箱状态。通过感知模块,无人集卡可以判断箱子是否已经放好或者被已经被取走。港口堆高机不需要进行任何的升级改造。。
7、优选地,上述技术方案中,感知模块为摄像头、激光雷达以及箱型传感器中的一种或几种。
8、优选地,上述技术方案中,感知模块是通过摄像头、激光雷达以及箱型传感器等感知装置对环境数据进行融合从而获取外界环境信息的模块,针对空箱区弱规则性中的堆高机装卸箱特征各异难点以及混流场景车流复杂难点,采用经典二阶深度卷积神经网络,针对港口码头空箱区场景进行网络的正向推理适配,回归堆高机、内外集卡不同障碍物的2d、3d信息,并利用图像增强技术,实现不同角度下的堆高机、内外集卡感知;同时在视觉基础上融合激光、毫米波等多种传感器信息,通过滤波器进行预测跟踪,在行驶预测线上以及车辆侧向安全距离范围内可准确感知不同障碍物,并对堆高机是否抓取集装箱进行属性判断输出,无人集卡感知系统通过对堆高机这类目标物进行大量的数据训练能够稳定识别堆高机是否抓箱、检测出堆高机距离无人集卡的距离;无人集卡通过激光雷达传感器能够提取相应的垂线特征识别集装箱与集装箱之间的箱线位置,通过对齐集装箱箱线位置实现目标位置的精准停车,这样堆高机不需要进行过多的横向调整便可以进行放箱作业,大大提高作业效率。
9、优选地,上述技术方案中,高精定位模块是通过全球导航卫星系统、实时动态载波相位差分技术、惯性导航等技术多种融合实现自车定位的模块;根据自车传感器获取的数据进行处理、融合后得到自车位置信息,所述定位模块使无人集卡能够实时获取自身位置信息。路径规划模块能够根据获取的目标位置进行车辆到终点的全局路径规划,并且可以根据实时的环境信息进行局部路径规划。
10、一种通过无人集卡自车感知的水平空箱区作业方法,其特征在于:包括如下步骤:
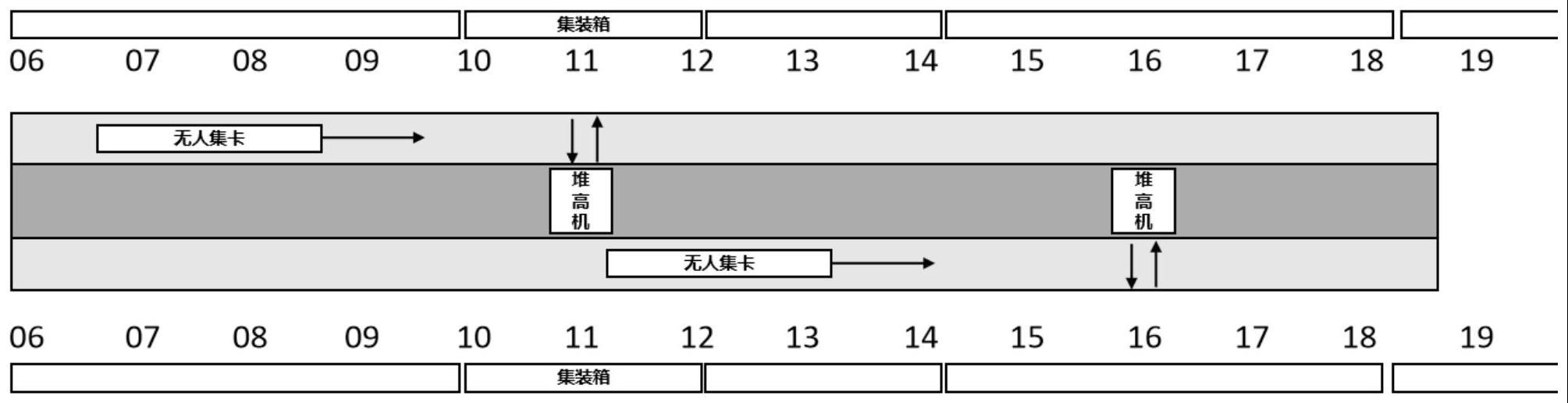
11、s1:无人集卡获取目标任务终点位置、任务类型、任务箱型,无人集卡根据目标贝位自主规划行驶路径,并结合地图定位、感知融合信息自动驾驶到达目标贝位进行粗停车。在到达目标贝位进行停车前,无人集卡会先在中间位置进行停车等待,停车等待的目的是为了让堆高机先进行抓箱作业。中间位置由无人集卡结合当前空箱区任务目标贝位确定,若目标贝位为小于等于x贝位时则中间位置则为入栏后某一固定位置,若目标贝位为大于x贝位则中间位置为目标贝位的前三个贝位;
12、s2:无人集卡在中间位置停车等待期间,会自主判断环境是否达到前进条件,若满足条件,则车辆往目标任务终点位置向前行驶;
13、s3:无人集卡前进至目标任务终点位置,并根据集装箱的箱线特征在目标贝位附近进行精准停车;
14、s4:无人集卡等待堆高机进行放箱作业,同时自主判断放箱是否完成;
15、s5:无人集卡获取下一个任务
16、s6:无人集卡收到任务后会判断当前任务是否是同贝位任务,并同时查询上一任务是否为小型任务。
17、优选地,上述技术方案中,s2中自主判断能否前进的步骤如下:
18、2.1无人集卡通过感知模块检测堆高机离自车的横向距离是否大于x米,若满足则进行下一个判断;
19、2.2无人集卡通过感知模块识别堆高机是否处于完成抓箱状态,若满足则进行下一个判断;
20、2.3无人集卡通过感知模块检测前进方向环境情况,规划模块判断是否影响本车前进到达目标位置,若不影响,则当前环境满足车辆前行至目标位置;
21、其中x值为可标定值,可以根据实际作业要求更改。
22、优选地,上述技术方案中,步骤s3中,无人集卡在目标位置精准停车的具体步骤如下:3.1无人集卡根据目标位置的经纬度坐标在目标贝位附近进行粗停车,粗停车的停车精度在 x m左右
23、3.2无人集卡获取侧方集装箱点云数据
24、3.3根据垂直边缘箱线特征提取出箱线
25、3.4计算出本车距离箱线纵向距离x米
26、3.5无人集卡前进或者后退x米使车头与集装箱边缘平齐,方便堆高机进行装卸箱操作
27、3.6无人集卡在目标贝位附近精准停车,停车精度可达到xcm内。
28、优选地,上述技术方案中,步骤s4中,自主判断装箱任务是否完成应包含一下三个步骤:
29、4.1箱型传感器感知集装箱是否已经在无人集卡安装到位;
30、4.2通过感知模块的摄像头和激光雷达检测堆高机是否无人集卡在侧向距离3米以外;
31、4.3识别堆高机机爪是否抓箱;
32、当上述三个条件都满足时,即箱型感知传感器识别出箱子已在无人集卡上安装完完成、堆高机在无人集卡侧方3米以外,堆高机机爪未抓箱,则判断已经完成装箱任务。
33、优选地,上述技术方案中,根据箱型任务的不同,会有两种不同的作业情况择一选择:
34、情况一:
35、s7:如果当前任务不是同贝位任务,则无人集卡自主规划路径,结合地图定位、感知模块自动驾驶驶离当前贝位,前往下一任务地点。
36、情况二:
37、s7:如果当前任务是同贝位任务且上一任务是小箱任务,则无人集卡向前移动三个贝位后停车等待。
38、s8:无人集卡驶离当前贝位后,在中间位置停车等待,并按相同方法判断堆高机是否取箱完成,车辆行进方向是否可以行驶。
39、s9:无人集卡具备双向行驶功能,当无人集卡检测到行驶方向满足后退条件时,无人集卡重新后退三个贝位至目标贝位。无人集卡根据相同逻辑判断装箱任务是否完成,当判断任务完成后,无人集卡获取下一任务,自主规划路径,结合地图定位、感知模块自动驾驶驶离当前贝位,前往下一任务地点;大箱任务为40寸箱子任务,小箱任务为小于40寸箱子任务或者20寸箱子任务。
40、大箱任务为40寸箱子任务,小箱任务为小于40寸箱子任务或者20寸箱子任务。在港口作业任务中,港口集装箱型号一般包括40寸集装箱和20寸集装箱,一辆无人集卡可以装一个40寸的箱子和两个20寸的箱子。当作业任务的箱型为40寸集装箱时,无人集卡只需进行一次装卸箱作业即可前往下一贝位进行下一任务。当作业任务的箱型为20寸时,无人集卡需要在同一相同贝位进行两次装卸作业,即第一次装卸箱完成后,需要前进几个贝位,待确认堆高机完成取箱或者放箱后,无人集卡后退进入上一个作业贝位继续进行装卸箱作业。故无人集卡还具备双向行驶功能,即无人集卡前进行驶还是后退行驶其感知能力,车辆运行能力都是一致的。
41、与现有技术相比,本发明具有如下有益效果:
42、结合自车周边环境感知与车端箱型感知能力能够自主判断装卸箱作业是否完成,完全实现全自动化装卸箱作业。
43、不需要改造港区堆高机设备,便可完成无人集卡自动化装卸箱整套作业流程。
44、无人集卡具备双向行驶能力,可以实现适配不同箱型的空箱区全自动化作业。
- 还没有人留言评论。精彩留言会获得点赞!