一种基于接触网与轨道三维模型更新铁路设备状态的方法与流程
1.本发明属于轨道交通三维仿真技术领域,尤其涉及一种基于接触网与轨道三维模型更新铁路设备状态的方法。
背景技术:
2.轨道交通接触网相关的三维仿真系统的开发中,三维模型是整个系统的基础,模型质量的好坏决定了系统最终的展示效果。在整个开发流程中,三维模型的制作占了相当大的工作量,需要大量人力物力。
3.传统建模最普遍使用的两种方案:手工制作和扫描建模。手工建模的人工成本高、工期较长,并且非常容易出错,尤其是接触网这种链式结构的模型,一个小部位的错误,会导致整个大模型都要调整,容错极低,导致工作量巨大;当采用扫描建模时,由于接触网都是大场景模型,一般采用无人机进行扫描建模,其存在的人工和设备成本高、模型精度不足、模型网格过多和对平台硬件性能要求高等问题,建模结果对铁路接触网一杆一档和轨道零部件级别的数据信息管理和竣工交付具有重要意义,基于建模得到的接触网与轨道三维模型实现实时更新现场铁路设备运行状态,能够有效提升铁路四电工程全貌模型与三维全景地貌模型融合呈现,实现对设备状态高效检测,但现有技术直接利用接触网与轨道三维模型对铁路设备运行状态进行更新,其数据精度不足,缺少对于接触网支柱和轨道零部件的非几何信息与几何信息的处理。
技术实现要素:
4.针对现有技术中的上述不足,本发明提供的一种基于接触网与轨道三维模型更新铁路设备状态的方法解决了传统轨道交通接触网相关建模存在的效率低下、成本高、容错低、路线兼容性低以及基于建模结果更新铁路设备运行状态的问题。
5.为了达到上述发明目的,本发明采用的技术方案为:
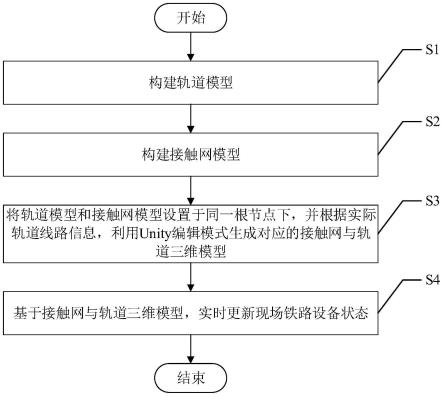
6.本发明提供的一种基于接触网与轨道三维模型更新铁路设备状态的方法,包括如下步骤:
7.s1、构建轨道模型;
8.s2、构建接触网模型;
9.s3、将轨道模型和接触网模型设置于同一根节点下,并根据实际轨道线路数据,利用unity编辑模式生成对应的接触网与轨道三维模型;
10.s4、基于接触网与轨道三维模型,实时更新现场铁路设备状态。
11.本发明的有益效果为:本发明提供的一种基于接触网与轨道三维模型更新铁路设备状态的方法,与传统建模方案相比,采用数据驱动程序自动化生成,极大提升了效率,并节约了人工成本,其中每个零部件都在数据中可控,更易于拓展更多功能,重复模型使用预制件技术,再根据实际轨道信息构建接触网与轨道三维模型,使渲染效率更易于优化,且实现了基于接触网与轨道三维模型,通过绑定支柱和轨道零部件非几何信息和几何信息,实
现实时高精度更新铁路设备运行状态。
12.进一步地,所述步骤s1包括如下步骤:
13.s11、获取轨道线路坐标点、公里标里程数据和线路类型数据;
14.s12、根据线路类型数据获取地基单元模型、桥梁单元模型和隧道单元模型;
15.s13、基于轨道线路坐标点和公里标里程数据,得到若干轨道线路大地坐标点;
16.s14、将各轨道线路大地坐标点转换至unity场景坐标系,得到若干unity场景轨道线路坐标点;
17.s15、基于线路类型数据分别对应选择地基单元模型、桥梁单元模型和隧道单元模型,并依次拼接各unity场景轨道线路坐标点,且利用unity模型加载函数完成轨道模型构建。
18.采用上述进一步方案的有益效果为:通过轨道坐标转换以及对应单元模型的构建与拼接,实现轨道模型的构建。
19.进一步地,所述步骤s15包括如下步骤:
20.s151、拆解初始轨道模型的单元模型网格;
21.s152、将unity场景轨道线路坐标点的起始点作为坐标原点,沿轨道线路方向,依次计算得到顶点位置坐标;
22.s153、基于线路类型数据分别对应选择地基单元模型、桥梁单元模型和隧道单元模型;
23.s154、针对同一类型轨道线路超过单元模型网格长度,则重复拼接对应的单元模型;
24.s155、基于顶点位置坐标计算得到法线、三角面和uv数据;
25.s156、基于顶点位置、法线、三角面和uv数据,依次拼接各unity场景轨道线路坐标点;
26.s157、根据拼接后的unity场景轨道线路坐标点,利用unity模型加载函数构建完整轨道模型,完成轨道模型的构建。
27.采用上述进一步方案的有益效果为:提供基于线路类型数据分别对应选择地基单元模型、桥梁单元模型和隧道单元模型,并依次拼接各unity场景轨道线路坐标点,且利用unity模型加载函数完成轨道模型构建的具体方法,为生成接触网与轨道三维模型提供基础。
28.进一步地,步骤s151中初始轨道模型的单元模型网格的计算表达式如下:
[0029][0030][0031]
其中,zf和z
l
分别表示沿轨道线路方向单元模型前端坐标值和后端坐标值,l表示单元模型网格大小,l表示轨道线路总长度,n表示单元模型总数,n表示第n个单元模型,
表示向下取整。
[0032]
采用上述进一步方案的有益效果为:提供初始轨道模型的单元模型网格的计算方法,为在同一类型轨道线路超过单元模型网格长度,则重复拼接对应的单元模型提供拼接的数据基础。
[0033]
进一步地,所述步骤s2包括如下步骤:
[0034]
s21、构建接触网支柱模型;
[0035]
s22、基于接触网支柱模型构建接触网腕臂模型;
[0036]
s23、基于接触网腕臂模型构建接触网悬挂模型;
[0037]
s24、拼接接触网支柱模型、接触网腕臂模型和接触网悬挂模型,完成接触网模型的构建。
[0038]
采用上述进一步方案的有益效果为:提供接触网模型的构建方法,通过依次构建支柱模型、接触网腕臂模型和接触网悬挂模型,并根据其对应的坐标位置关系进行模型构建与拼接,完成接触网模型的构建,为生成接触网与轨道三维模型提供基础。
[0039]
进一步地,所述步骤s21包括如下步骤:
[0040]
s211、获取轨道线路的中心点坐标、侧面限界和轨道支柱数据;
[0041]
s212、根据轨道线路的中心点坐标、侧面限界和轨道支柱数据,得到轨道支柱坐标点;
[0042]
s213、基于轨道支柱坐标点和轨道支柱垂直于线路切线方向,得到轨道支柱旋转值;
[0043]
s214、根据轨道支柱数据选择对应的支柱类型,并设置选择支柱类型对应的轨道支柱坐标点和支柱旋转值;
[0044]
s215、重复步骤s211至步骤s214,直至轨道线路沿线接触网支柱模型构建完成。
[0045]
采用上述进一步方案的有益效果为:提供接触网支柱模型的构建方法,通过支柱类型对应的轨道支柱坐标点和支柱旋转值依次拼接实现构建接触网支柱模型,为接触网腕臂模型的构建提供基础。
[0046]
进一步地,所述步骤s22包括如下步骤:
[0047]
s221、获取腕臂类型数据、腕臂结构数据、腕臂零部件型号数据、腕臂尺寸数据和腕臂高度数据;
[0048]
s222、基于腕臂零部件型号数据构建对应零部件型号的腕臂零部件模型;
[0049]
s223、根据腕臂类型数据、腕臂结构数据腕臂尺寸数据和腕臂高度数据,并基于腕臂零部件模型和对应的接触网支柱模型,得到腕臂结构模型;
[0050]
s224、利用腕臂三角结构函数计算得到腕臂结构模型的位置坐标信息和旋转角度;
[0051]
s225、基于腕臂结构模型的位置坐标信息和旋转角度,将腕臂结构模型置于接触网支柱模型对应的位置坐标处,完成接触网腕臂模型的构建。
[0052]
采用上述进一步方案的有益效果为:提供接触网腕臂模型的构建方法,基于获取腕臂类型数据、腕臂结构数据、腕臂零部件型号数据、腕臂尺寸数据和腕臂高度数据,并利用腕臂三角结构函数计算得到腕臂结构模型的位置坐标信息和旋转角度,实现接触网腕臂模型的构建,为接触网悬挂模型的构建提供基础。
[0053]
进一步地,所述腕臂结构模型包括单腕臂结构型和双腕臂结构型;
[0054]
所述单腕臂结构型为单个接触网腕臂设置于其对应的接触网支柱模型;所述双腕臂结构型为两个接触网腕臂横担设置于其对应的接触网支柱模型。
[0055]
采用上述进一步方案的有益效果为:提供腕臂结构模型的两种类型,单腕臂结构型和双腕臂结构型能够适应实际的轨道线路项目仿真,且生成的接触网与轨道三维模型更加准确。
[0056]
进一步地,所述步骤s23包括如下步骤:
[0057]
s231、沿轨道线路起点依次获取接触网腕臂模型中相邻腕臂结构模型、及其吊弦间隔长度数据和吊弦长度数据;
[0058]
s232、基于相邻腕臂结构模型,获取unity中对应的接触线单元模型、承力索单元模型和吊弦单元模型;
[0059]
s234、基于相邻腕臂结构模型的吊弦间隔长度数据和吊弦长度数据,计算得到接触线单元模型的缩放值;
[0060]
s235、根据接触线单元模型的缩放值,利用接触线单元模型、承力索单元模型和吊弦单元模型对相邻腕臂结构模型依次进行连线,完成接触网悬挂模型的构建。
[0061]
采用上述进一步方案的有益效果为:提供接触网悬挂模型的构建方法,基于相邻腕臂结构模型、及其吊弦间隔长度数据和吊弦长度数据,通过缩放处理,并根据吊弦间隔长度数据和吊弦长度数据依次连线,实现接触网悬挂模型的构建,为接触网模型的构建和接触网与轨道三维模型的生成提供基础。
[0062]
进一步地,所述步骤s4包括如下步骤:
[0063]
s41、基于接触网与轨道三维模型,绑定接触网各支柱非几何信息与几何信息,其中,各支柱的非几何信息包括支柱号、支柱类型、支柱用途、侧面限界、和外轨超高,各支柱的几何信息包括中间柱、转换柱、道岔柱、12号单开线岔、18号无交分线岔、软横跨生成、隧道上下锚、中心锚结、硬横梁、八跨电分相、分段绝缘器、分相绝缘器和绝缘/非绝缘锚段关节;
[0064]
s42、基于接触网与轨道三维模型,绑定轨道零部件的非几何信息与几何信息,其中,轨道零部件的非几何信息包括道岔的线别、车站名、行别、道岔编号、种类、左右开、轨型、辙叉号、尖轨类型和左键尖轨长,轨道零部件的几何信息包括道岔、轨枕、道床、焊缝和钢轨;
[0065]
s43、基于非几何信息和几何信息绑定后的接触网与轨道三维模型,实时更新现场铁路设备的运行状态。
[0066]
采用上述进一步方案的有益效果为:通过分别对接触网的每根支柱和轨道零部件的非几何信息与几何信息进行绑定后,实现高精度对现场铁路设备的运行状态实时更新,为有效提升铁路四电工程全貌模型与三维全景地貌模型融合呈现,实现对设备状态高效检测提供基础。
附图说明
[0067]
图1为本发明实施例中一种基于接触网与轨道三维模型更新铁路设备状态的方法的步骤流程图。
[0068]
图2为本发明实施例中轨道模型的示意图。
[0069]
图3为本发明实施例中接触网模型的示意图。
[0070]
图4为本发明实施例中数据驱动生成接触网与轨道三维模型的示意图。
具体实施方式
[0071]
下面对本发明的具体实施方式进行描述,以便于本技术领域的技术人员理解本发明,但应该清楚,本发明不限于具体实施方式的范围,对本技术领域的普通技术人员来讲,只要各种变化在所附的权利要求限定和确定的本发明的精神和范围内,这些变化是显而易见的,一切利用本发明构思的发明创造均在保护之列。
[0072]
如图1所示,在本发明的一个实施例中,本发明提供一种基于接触网与轨道三维模型更新铁路设备状态的方法,包括如下步骤:
[0073]
s1、构建轨道模型;
[0074]
所述步骤s1包括如下步骤:
[0075]
s11、获取轨道线路坐标点、公里标里程数据和线路类型数据;
[0076]
s12、根据线路类型数据获取地基单元模型、桥梁单元模型和隧道单元模型;
[0077]
s13、基于轨道线路坐标点和公里标里程数据,得到若干轨道线路大地坐标点;
[0078]
s14、将各轨道线路大地坐标点转换至unity场景坐标系,得到若干unity场景轨道线路坐标点;
[0079]
s15、基于线路类型数据分别对应选择地基单元模型、桥梁单元模型和隧道单元模型,并依次拼接各unity场景轨道线路坐标点,且利用unity模型加载函数完成轨道模型构建;
[0080]
所述步骤s15包括如下步骤:
[0081]
s151、拆解初始轨道模型的单元模型网格;
[0082]
步骤s151中初始轨道模型的单元模型网格的计算表达式如下:
[0083][0084][0085]
其中,zf和z
l
分别表示沿轨道线路方向单元模型前端坐标值和后端坐标值,l表示单元模型网格大小,l表示轨道线路总长度,n表示单元模型总数,n表示第n个单元模型,表示向下取整;
[0086]
s152、将unity场景轨道线路坐标点的起始点作为坐标原点,沿轨道线路方向,依次计算得到顶点位置坐标;
[0087]
s153、基于线路类型数据分别对应选择地基单元模型、桥梁单元模型和隧道单元模型;
[0088]
s154、针对同一类型轨道线路超过单元模型网格长度,则重复拼接对应的单元模
型;
[0089]
s155、基于顶点位置坐标计算得到法线、三角面和uv数据;
[0090]
s156、基于顶点位置、法线、三角面和uv数据,依次拼接各unity场景轨道线路坐标点;
[0091]
s157、根据拼接后的unity场景轨道线路坐标点,利用unity模型加载函数构建完整轨道模型,完成轨道模型的构建,如图2所示;
[0092]
s2、构建接触网模型;
[0093]
所述步骤s2包括如下步骤:
[0094]
s21、构建接触网支柱模型;
[0095]
所述步骤s21包括如下步骤:
[0096]
s211、获取轨道线路的中心点坐标、侧面限界和轨道支柱数据;
[0097]
s212、根据轨道线路的中心点坐标、侧面限界和轨道支柱数据,得到轨道支柱坐标点;
[0098]
s213、基于轨道支柱坐标点和轨道支柱垂直于线路切线方向,得到轨道支柱旋转值;
[0099]
s214、根据轨道支柱数据选择对应的支柱类型,并设置选择支柱类型对应的轨道支柱坐标点和支柱旋转值;
[0100]
s215、重复步骤s211至步骤s214,直至轨道线路沿线接触网支柱模型构建完成;
[0101]
s22、基于接触网支柱模型构建接触网腕臂模型;
[0102]
所述步骤s22包括如下步骤:
[0103]
s221、获取腕臂类型数据、腕臂结构数据、腕臂零部件型号数据、腕臂尺寸数据和腕臂高度数据;
[0104]
s222、基于腕臂零部件型号数据构建对应零部件型号的腕臂零部件模型;
[0105]
s223、根据腕臂类型数据、腕臂结构数据腕臂尺寸数据和腕臂高度数据,并基于腕臂零部件模型和对应的接触网支柱模型,得到腕臂结构模型;
[0106]
所述腕臂结构模型包括单腕臂结构型和双腕臂结构型;
[0107]
所述单腕臂结构型为单个接触网腕臂设置于其对应的接触网支柱模型;所述双腕臂结构型为两个接触网腕臂横担设置于其对应的接触网支柱模型;
[0108]
s224、利用腕臂三角结构函数计算得到腕臂结构模型的位置坐标信息和旋转角度;
[0109]
s225、基于腕臂结构模型的位置坐标信息和旋转角度,将腕臂结构模型置于接触网支柱模型对应的位置坐标处,完成接触网腕臂模型的构建;
[0110]
s23、基于接触网腕臂模型构建接触网悬挂模型;
[0111]
所述步骤s23包括如下步骤:
[0112]
s231、沿轨道线路起点依次获取接触网腕臂模型中相邻腕臂结构模型、及其吊弦间隔长度数据和吊弦长度数据;
[0113]
s232、基于相邻腕臂结构模型,获取unity中对应的接触线单元模型、承力索单元模型和吊弦单元模型;
[0114]
s234、基于相邻腕臂结构模型的吊弦间隔长度数据和吊弦长度数据,计算得到接
触线单元模型的缩放值;
[0115]
s235、根据接触线单元模型的缩放值,利用接触线单元模型、承力索单元模型和吊弦单元模型对相邻腕臂结构模型依次进行连线,完成接触网悬挂模型的构建;
[0116]
s24、拼接接触网支柱模型、接触网腕臂模型和接触网悬挂模型,完成接触网模型的构建,如图3所示;
[0117]
s3、将轨道模型和接触网模型设置于同一根节点下,并根据实际轨道线路数据,利用unity编辑模式生成对应的接触网与轨道三维模型,如图4所示;
[0118]
接触网+轨道算法提高了建模效率,减少了工时,降低了人为操作产生的模型误差等,使接触网几何参数更精准,铁路接触网零部件模型库运用建模软件还原零部件几何结构和物理光学特性,实现了专业族库模型可重复利用,后续模型优化与修改也更高效,无需人工修改,导入数据即可实现模型实时动态变化;
[0119]
s4、基于接触网与轨道三维模型,实时更新现场铁路设备状态;
[0120]
所述步骤s4包括如下步骤:
[0121]
s41、基于接触网与轨道三维模型,绑定接触网各支柱非几何信息与几何信息,其中,各支柱的非几何信息包括支柱号、支柱类型、支柱用途、侧面限界、和外轨超高,各支柱的几何信息包括中间柱、转换柱、道岔柱、12号单开线岔、18号无交分线岔、软横跨生成、隧道上下锚、中心锚结、硬横梁、八跨电分相、分段绝缘器、分相绝缘器和绝缘/非绝缘锚段关节;
[0122]
s42、基于接触网与轨道三维模型,绑定轨道零部件的非几何信息与几何信息,其中,轨道零部件的非几何信息包括道岔的线别、车站名、行别、道岔编号、种类、左右开、轨型、辙叉号、尖轨类型和左键尖轨长,轨道零部件的几何信息包括道岔、轨枕、道床、焊缝和钢轨;
[0123]
s43、基于非几何信息和几何信息绑定后的接触网与轨道三维模型,实时更新现场铁路设备的运行状态。
[0124]
以构建的接触网与轨道三维模型为中心实时更新实际现场设备的运行状态,并将该功能主要放在网页端系统中,以便不同层级用户查找、导出所需要的信息;可应用于实现铁路四电工程全貌模型与三维全景地貌模型融合呈现,实现对设备状态检测,利用数据库编程技术和物联网技术,实时更新接触网工程结构数据,驱动模型自动位移,使bim模型结构状态与现场同步,为后续工程运营模型机械载荷、受力状态等分析提供开发基础;还可实现千公里级别铁路接触网系统模型轻量化承载,根据视角的不同自动调用专业族库中不同精度的零部件模型,实现数千公里级别的线性铁路模型和大场景加载;该功能在网页端、客户端的部署模式还降低了铁路四电工程全貌bim模型的使用门槛,使得模型在项目部得到大规模应用成为可能,为推动铁路施工项目全电子化竣工交付给运维单位起到了至关重要的作用。
[0125]
本发明的有益效果为:本发明提供的一种基于接触网与轨道三维模型更新铁路设备状态的方法,与传统建模方案相比,采用数据驱动程序自动化生成,极大提升了效率,并节约了人工成本,其中每个零部件都在数据中可控,更易于拓展更多功能,重复模型使用预制件技术,再根据实际轨道信息构建接触网与轨道三维模型,使渲染效率更易于优化,且实现了基于接触网与轨道三维模型,通过绑定支柱和轨道零部件非几何信息和几何信息,实
现实时高精度更新铁路设备运行状态。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1