一种均化机理下的密珠轴系回转误差建模方法
1.本发明涉及轴系回转误差建模技术领域,具体为一种均化机理下的密珠轴系回转误差建模方法。
背景技术:
2.密珠轴系是精密仪器的核心部件,其回转精度直接影响仪器的精度和工作性能。密珠轴系采用过盈配合,钢球数量多,可通过误差均化效应来提高轴系的回转精度。目前对于密珠轴系的结构设计,均依赖设计人员的工作经验;对于密珠轴系的精度提升,直至目前还是采取盲目提高工艺精度的方法,导致密珠轴系设计制造缺乏主动性和科学性。密珠轴系误差均化机理迄今尚不明确,误差均化值的精确求解一直没有得到解决,均化效果未进行定量分析,存在理论缺失,限制了密珠轴系的应用推广。
技术实现要素:
3.(一)解决的技术问题
4.针对现有技术的不足,本发明提供了一种均化机理下的密珠轴系回转误差建模方法,能够精确求解密珠轴系误差均化系数,定量揭示组成构件各因素对回转误差的影响规律,为密珠轴系的结构优化设计和精度提升提供理论依据。
5.(二)技术方案
6.为实现以上目的,本发明通过以下技术方案予以实现:
7.第一方面,提供了一种均化机理下的密珠轴系回转误差建模方法,包括:
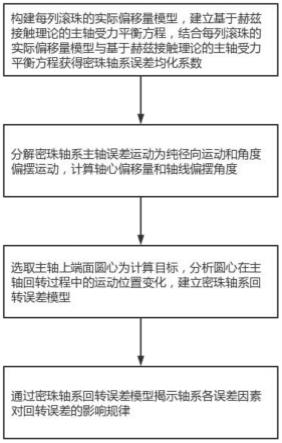
8.构建每列滚珠的实际偏移量模型,建立基于赫兹接触理论的主轴受力平衡方程,结合每列滚珠的实际偏移量模型与基于赫兹接触理论的主轴受力平衡方程获得密珠轴系误差均化系数;
9.分解密珠轴系主轴误差运动为纯径向运动和角度偏摆运动,计算轴心偏移量和轴线偏摆角度;
10.选取主轴上端面圆心为计算目标,分析圆心在主轴回转过程中的运动位置变化,建立密珠轴系回转误差模型;
11.通过密珠轴系回转误差模型揭示轴系各误差因素对回转误差的影响规律。
12.优选的,所述每列滚珠的实际偏移量模型,具体为:
[0013][0014]
其中,da为主轴轴颈外径,δ为第1列滚珠误差引起的主轴轴心实际偏移量;为第j列滚珠所在初始角度;δj是其第j列滚珠误差引起的主轴轴心实际偏移量。
[0015]
优选的,所述基于赫兹接触理论的主轴受力平衡方程,具体为:
[0016][0017]
其中,m为滚珠排数,n为每象限滚珠列数,j为滚珠所在列数,δ0为初始过盈量,e
δ
为滚珠与轴颈、轴套接触时的赫兹接触系数,σρi为滚珠与轴颈接触时的曲率和,δ为第1列滚珠所在初始位置处的总误差。
[0018]
优选的,所述结合每列滚珠的实际偏移量模型与基于赫兹接触理论的主轴受力平衡方程,获得密珠轴系误差均化系数,具体包括:
[0019]
联立每列滚珠的实际偏移量模型与基于赫兹接触理论的主轴受力平衡方程,得由δ引起的密珠轴系实际轴心偏距δ,密珠轴系实际轴心偏距δ和滚珠排数m有关,定义密珠轴系误差均化系数λm:
[0020][0021]
优选的,所述分解密珠轴系主轴误差运动为纯径向运动和角度偏摆运动,计算轴心偏移量和轴线偏摆角度,具体包括:
[0022]
采用全点法计算主轴误差运动带来的轴心偏移量和轴线偏摆角度;
[0023]
所述全点法包括计算第j列滚珠中总误差最大滚珠fj与第j列中所有其他各滚珠之间,由误差差值所引起的偏转角度α
ij
,并进行比较,将|α
ij
|最小值所在的滚珠记为sj,利用滚珠sj计算第j列滚珠引起的纯径向运动下的轴心偏距,利用滚珠fj和sj计算轴线偏摆角度;
[0024]
纯径向运动误差由滚珠sj处的总误差δ
sj
引起,沿滚珠sj的对径方向偏移,所述总误差引起的轴心偏距δ
sj
为:
[0025]
δ
sj
=λm×
δ
sj
[0026]
角度偏摆运动误差的计算:
[0027][0028]
其中,αj为第j列滚珠引起的偏摆角度,δ
fj
为第j列中滚珠fj处的总误差,δ
sj
为第j列中滚珠sj处的总误差,i
fj
为第j列中滚珠fj所在的排数,i
sj
为第j列中滚珠sj所在的排数,k为象限数,取值为1-4;
[0029]
角度偏摆误差运动引起主轴绕主轴与sj的接触点qj偏摆,接触点qj的计算:
[0030][0031][0032]
其中,x
qj
、y
qj
、z
qj
分别为接触点qj沿x、y、z方向的位置坐标,la为保持架同列中相邻两排滚珠圆心之间的z向距离,lb为同排相邻两列滚珠圆心之间的z向距离,lc为第1排第1列滚珠距保持架顶端距离。
[0033]
优选的,所述选取某端面圆心为计算目标,分析圆心在主轴回转过程中的运动位置变化,建立密珠轴系回转误差模型,具体包括:
[0034]
第j列滚珠所在位置处误差引起某端面圆心o
p
点位置变动,位置变动量建立模型为:
[0035][0036]
其中,δp
jx
(β)、δp
jy
(β)、δp
jz
(β)分别为第j列滚珠所在位置处误差引起的o
p
点沿x、y、z方向的位置变动量,x
p0
、y
p0
、z
p0
分别为o
p
点沿x、y、z方向初始坐标值;
[0037]
第j列滚珠引起的密珠轴系回转误差的计算为:
[0038][0039]
其中,r为顶尖最大圆半径;
[0040]
建立密珠轴系回转误差模型为:
[0041][0042]
第二方面,提供了一种存储一个或多个程序的计算机可读存储介质,所述一个或多个程序包括指令,所述指令当由计算设备执行时,使得所述计算设备执行所述的方法中的任一方法。
[0043]
第三方面,提供了一种计算设备,包括:
[0044]
一个或多个处理器、存储器以及一个或多个程序,其中一个或多个程序存储在所述存储器中并被配置为由所述一个或多个处理器执行,所述一个或多个程序包括用于执行所述的方法中的任一方法的指令。
[0045]
(三)有益效果
[0046]
本发明一种均化机理下的密珠轴系回转误差建模方法,精确求解了密珠轴系误差均化系数,揭示了密珠轴系误差均化机理,所述模型可用于定量分析组成构件各因素对回
转误差的影响规律,弥补了密珠轴系结构设计理论及误差均化机理方面的不足,为提高密珠轴系回转精度提供了理论依据。
附图说明
[0047]
图1为本发明方法流程图;
[0048]
图2为本发明实施例中轴系回转误差计算流程图;
[0049]
图3为本发明实施例中存在误差时的主轴偏移图;
[0050]
图4为本发明实施例中误差均化系数与滚珠排数的变化趋势图;
[0051]
图5为本发明实施例中径向轴承保持架展开示意图;
[0052]
图6为本发明实施例中径向轴承保持架俯视示意图;
[0053]
图7为本发明实施例中回转误差均值随滚珠排数的变化趋势图;
[0054]
图8为本发明实施例中回转误差均值随滚珠尺寸误差范围的变化趋势图;
[0055]
图9为本发明实施例中回转误差均值随过盈量的变化趋势图。
具体实施方式
[0056]
下面将结合本发明的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0057]
实施例
[0058]
如图1所示,本发明实施例提供一种均化机理下的密珠轴系回转误差建模方法,包括:
[0059]
构建每列滚珠的实际偏移量模型,建立基于赫兹接触理论的主轴受力平衡方程,结合每列滚珠的实际偏移量模型与基于赫兹接触理论的主轴受力平衡方程获得密珠轴系误差均化系数;
[0060]
分解密珠轴系主轴误差运动为纯径向运动和角度偏摆运动,计算轴心偏移量和轴线偏摆角度;
[0061]
选取主轴上端面圆心为计算目标,分析圆心在主轴回转过程中的运动位置变化,建立密珠轴系回转误差模型;
[0062]
通过密珠轴系回转误差模型揭示轴系各误差因素对回转误差的影响规律。
[0063]
该方法计算流程图参见附图2所示,步骤如下:
[0064]
第一步,参见附图3,第1列滚珠所在初始位置处的总误差(包含滚珠尺寸误差、轴颈和轴套的圆度误差)为δ,所述总误差为正,此时主轴轴心向左偏移,偏移量为δ,通过以下公式获得每列滚珠的实际偏移量模型:
[0065][0066]
其中,da为主轴轴颈外径,δ为第1列滚珠误差引起的主轴轴心实际偏移量;为第j列滚珠所在初始角度,参加附图6;δj是其第j列滚珠误差引起的主轴轴心实际偏移量。
[0067]
第二步,根据赫兹接触理论,滚珠与主轴或轴套接触时发生弹性变形,对主轴产生
作用力,主轴受所有滚珠作用力后达到平衡状态,通过以下公式构建主轴受力平衡方程:
[0068][0069]
其中,m为滚珠排数,n为每象限滚珠列数,j为滚珠所在列数,δ0为初始过盈量,e
δ
为滚珠与轴颈、轴套接触时的赫兹接触系数,σρi为滚珠与轴颈接触时的曲率和,δ为第1列滚珠所在初始位置处的总误差。
[0070]
第三步,联立每列滚珠的实际偏移量模型、主轴受力平衡方程获得误差δ引起的密珠轴系实际轴心偏距δ,其与滚珠排数m有关。
[0071]
第四步,定义密珠轴系误差均化系数λm:
[0072][0073]
取δ0=5μm,n=6,δ=1μm。当m取值为1~15时,根据上述公式可求得误差均化系数λm与滚珠排数m之间的关系趋势图参见附图4所示,可看出误差均化效果。
[0074]
第五步,参见图7,求解每个滚珠坐标位置。
[0075]
第六步,比较每列滚珠中总误差最大滚珠fj与此列中所有其他各滚珠之间,由误差差值所引起的偏转角度α
ij
,并进行比较,将|α
ij
|最小值所在的滚珠记为sj,然后利用滚珠sj来计算第j列滚珠引起的纯径向运动下的轴心偏距:
[0076]
δ
sj
=λm×
δ
sj
[0077]
第七步,角度偏摆运动是由没类滚珠大小不一致引起,利用滚珠fj和sj,通过以下公式来计算轴线偏摆角度:
[0078][0079]
其中,αj为第j列滚珠引起的偏摆角度,δ
fj
为第j列中滚珠fj处的总误差,δ
sj
为第j列中滚珠sj处的总误差,i
fj
为第j列中滚珠fj所在的排数,i
sj
为第j列中滚珠sj所在的排数,k为象限数,取值为1-4。
[0080]
第八步,所述角度偏摆误差运动引起主轴绕主轴与sj的接触点qj偏摆,计算所述接触点qj的位置坐标:
[0081]
[0082]
其中:
[0083][0084]
式中,x
qj
、y
qj
、z
qj
分别为偏转点qj沿x、y、z方向的位置坐标,la为保持架同列中相邻两排滚珠圆心之间的z向距离,lb为同排相邻两列滚珠圆心之间的z向距离,lc为第1排第1列滚珠距保持架顶端距离,参见附图5。
[0085]
第九步,选取某端面圆心o
p
为计算目标,求解由第j列滚珠所在位置处误差引起的顶尖上点o
p
的位置变动量:
[0086][0087]
式中,δp
jx
(β)、δp
jy
(β)、δp
jz
(β)分别为误差引起的o
p
点沿x、y、z方向的位置变动量,x
p0
、y
p0
、z
p0
分别为o
p
点沿x、y、z方向初始坐标值。
[0088]
第十步,求解第j列滚珠引起的密珠轴系回转误差:
[0089][0090]
第十一步,建立密珠轴系回转误差模型为:
[0091][0092]
依据模型,可为密珠轴系结构设计提供建议。
[0093]
参见附图7,为根据模型计算的回转误差均值随滚珠排数的变化趋势图;可见滚珠排数对回转误差影响很大,当滚珠排数取1~5时,随着滚珠排数的增多,回转误差值呈剧烈下降趋势,误差均化效应有效抑制了尺寸误差对回转精度的影响。但当滚珠排数大于6时,回转误差下降不再明显,特别是滚珠排数大于10排时,滚珠排数的增加对回转精度的影响微乎其微。同时随着滚珠数量的增加,摩擦力矩会增加,降低轴系的灵活性和稳定性,因此为同时兼顾轴系精度和灵活性、稳定性,建议密珠轴系可根据尺寸大小选择6~10排滚珠。
[0094]
参见附图8,为根据模型计算的回转误差均值随滚珠尺寸误差范围的变化趋势图;可以看出随着滚珠误差范围δd的增加,回转误差均值整体呈线性上升趋势,且δd对回转误差影响较大。为保证轴系回转精度,应对滚珠进行预先甄选,严格控制δd值,尽可能选择尺寸一致性高的滚珠。
[0095]
参见附图9,为根据模型计算的回转误差均值随过盈量的变化趋势图;可以看出,随着过盈量的增加,回转误差均值整体呈下降趋势,过盈量增加有利于提高主轴的回转精度。当δ0≤3μm时,随着过盈量的增加,回转误差下降趋势较大;但当δ0>3μm时,回转误差趋于平稳。综合考虑轴系的精度要求和实际情况,建议可根据滚珠及轴系尺寸及误差大小选择过盈量为3~8μm左右。
[0096]
利用本发明的密珠轴系回转误差建模方法能够获得误差均化机理下的回转误差模型,利用所述模型可揭示轴系各误差因素对回转误差的影响规律,进而提出回转精度的保证策略,为设计人员确定密珠轴系的优化设计原则和精度提升提供主动性和科学性。
[0097]
本技术的实施例可提供为方法或计算机程序产品。因此,本技术可采用完全硬件实施例、完全软件实施例、或结合软件和硬件方面的实施例的形式。而且,本技术可采用在一个或多个其中包含有计算机可用程序代码的计算机可用存储介质(包括但不限于磁盘存储器、cd-rom、光学存储器等)上实施的计算机程序产品的形式。本技术实施例中的方案可以采用各种计算机语言实现,例如,面向对象的程序设计语言java和直译式脚本语言javascr ipt等。
[0098]
本技术是参照根据本技术实施例的方法、设备(系统)、和计算机程序产品的流程图和/或方框图来描述的。应理解可由计算机程序指令实现流程图和/或方框图中的每一流程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的装置。
[0099]
这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令装置的制造品,该指令装置实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能。
[0100]
这些计算机程序指令也可装载到计算机或其他可编程数据处理设备上,使得在计算机或其他可编程设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程设备上执行的指令提供用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的步骤。
[0101]
需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1