基于力反馈的远程操控树障清理机器人设计方法与流程
1.本发明涉及城市电网技术领域,具体涉及基于力反馈的远程操控树障清理机器人设计方法。
背景技术:
2.大、中城市和大型工矿区通过电力网络向用户输送和分配电能。其电力网络称为城市电网,由送、配电线路和变电所、配电所组成。
3.城市供电特点主要有以下特点:城市工业集中,用电量大,负荷密度高而且增长迅速。对未来负荷的增长规划中要留有充分的发展余地;大城市集中了政府机关、重要的科学研究机构、管理单位和各种工厂、市政公共设施,其中重要用户一旦供电中断会造成严重后果。因此,要求电网提供安全可靠、高质量的电能;市区内人口稠密,道路交通拥挤,所以线路走廊和变电所用地受到严格的限制,往往不得不采用地下结构。此外还要考虑与环境保护有关的条件,如防止大气污染、防止噪声干扰、美化市容和搞好绿化等方面对供电设施提出的要求和限制。
4.但由于城市中的绿化区域树木生长,部分输电线缆可能因树木生长的枝丫而阻碍供电,或造成线路故障,在出现这类问题时,人们往往通过人工的方式对树障进行清理,随科技的进一步发展,人们研发出树障清理机器人来代替人工对树障进行清理作业,但目前的树障清理机器人并不具备力反馈功能,从而树障清理机器人所配备的树障剪切、火焰喷射等功能工位可能在运行时对输电线缆造成损伤。
技术实现要素:
5.解决的技术问题
6.针对现有技术所存在的上述缺点,本发明提供了基于力反馈的远程操控树障清理机器人设计方法,解决了上述背景技术中提出的技术问题。
7.技术方案
8.为实现以上目的,本发明通过以下技术方案予以实现:
9.基于力反馈的远程操控树障清理机器人设计方法,包括以下步骤:
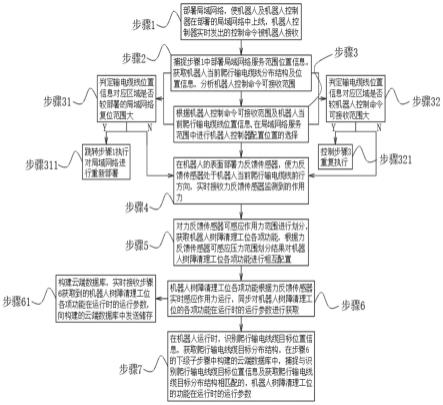
10.步骤1:部署局域网络,使机器人及机器人控制器在部署的局域网络中上线,机器人控制器实时发出的控制命令被机器人接收;
11.步骤2:捕捉步骤1中部署局域网络服务范围位置信息,获取机器人当前爬行输电缆线分布结构及位置信息,分析机器人控制命令可接收范围;
12.步骤3:根据机器人控制命令可接收范围及机器人当前爬行输电缆线位置信息,在局域网络服务范围中进行机器人控制器配置位置的选择;
13.步骤4:在机器人的表面部署力反馈传感器,使力反馈传感器处于机器人当前爬行输电缆线前行方向,实时接收力反馈传感器监测到的作用力;
14.步骤5:对力反馈传感器可感应作用力范围进行划分,获取机器人树障清理工位各
项功能,根据力反馈传感器可感应压力范围划分结果对机器人树障清理工位各项功能进行相互配置;
15.步骤6:机器人树障清理工位各项功能根据力反馈传感器实时感应作用力运行,同步对机器人树障清理工位的各项功能在运行时的运行参数进行获取;
16.步骤7:在机器人运行时,识别爬行输电线缆目标位置信息,获取爬行输电线缆目标分布结构,在步骤6的下级子步骤中构建的云端数据库中,捕捉与识别爬行输电线缆目标位置信息及获取爬行输电线缆目标分布结构相匹配的,机器人树障清理工位的功能在运行时的运行参数。
17.更进一步地,所述步骤1中机器人及机器人控制器在部署的局域网络中上线后,机器人控制器在局域网络中对机器人发出的控制命令在局域网络中实时储存。
18.更进一步地,所述步骤2与步骤3在进行机器人控制器配置位置的选择时,实时获取机器人当前爬行输电缆线位置信息对应输电缆线区域范围,在输电缆线区域范围内捕捉范围中心位置作为机器人控制器配置位置的选择目标。
19.更进一步地,所述步骤2与步骤3下级设置有子步骤,包括以下步骤:
20.步骤31:判定输电缆线位置信息对应区域是否较部署的局域网络复位范围大;
21.步骤311;步骤31判定结果为是,跳转步骤1执行对局域网络进行重新部署;
22.步骤32:判定输电缆线位置信息对应区域是否较机器人控制命令可接收范围大;
23.步骤321:步骤32判定结果为是,控制步骤3重复执行;
24.其中,所述步骤31及步骤32在判定结果为均为否时,在步骤2与步骤3执行结束后,跳转步骤4进一步执行。
25.更进一步地,所述步骤4中在对机器人部署力反馈传感器时对力反馈传感器设置有监测数据反馈阈值,力反馈传感器在实时监测到作用力数据时,同步与设置的监测数据反馈阈值进行比对,将比对结果储存于步骤4中。
26.更进一步地,所述步骤5在完成力反馈传感器可感应作用力范围划分结果与机器人树障清理工位各项功能相互配置后,机器人表面部署的力反馈传感器实时监测到的作用力首先与步骤4设置的反馈阈值进行比对,在力反馈传感器监测到的作用力处于反馈阈值范围内后进一步步骤5发送,步骤5将力反馈传感器监测到的作用力与划分的力反馈传感器可感应作用力范围进行匹配,根据匹配结果触发相应的机器人树障清理工位的对应功能运行。
27.更进一步地,所述步骤6下级设置有子步骤,包括以下步骤:
28.步骤61:构建云端数据库,实时接收步骤6获取到的机器人树障清理工位各项功能在运行时的运行参数,向构建的云端数据库中发送储存。
29.更进一步地,所述步骤6中对机器人运行参数的获取内容包括:机器人当前爬行输电缆线位置信息、机器人当前清理树障工位所使用的功能;
30.步骤6在获取机器人运行参数后,对各项运行参数进行相互匹配后打包,步骤61向构建的云端数据库中发送储存的运行参数为步骤6完成打包处理后的运行参数。
31.更进一步地,所述步骤7在捕捉到匹配项时,驱动机器人树障清理工位的响应功能驱动运行,步骤7在捕捉到匹配项后,机器人被机器人控制器控制运行时,步骤7捕捉到的匹配项于步骤6的子步骤61所构建的云端数据库中删除,并以当前机器人被机器人控制器所
控制运行的运行参数数据作为替换目标向云端数据库中发送。
32.有益效果
33.采用本发明提供的技术方案,与已知的公有技术相比,具有如下有益效果:
34.1、本发明提供一种基于力反馈的远程操控树障清理机器人设计方法,通过该方法中的步骤执行,能够为机器人及机器人控制器配置独立的局域网络用于机器人在运行过程中的控制命令的收发,以此有效的维护了机器人运行的稳定,同时通过设定阈值的方式,使得机器人在配置力反馈传感器的状态下不会因大风天气的风级过大而出现机器人树障清理工位功能出现误触发的情况。
35.2、本发明中方法在步骤的执行过程中,进一步的设定阈值使得力反馈传感器的各感应作用力数值与机器人树障清理工位功能进相互匹配,从而通过力反馈传感器实时感应的作用力数值来对机器人树障清理工位功能进行触发,使得机器人具备一定程度的自主运行能力,以此使得树障清理机器人的使用更加智能。
36.3、本发明中方法在步骤的执行过程中还能够对机器人的运行参数进行储存,并在储存时对机器人运行参数时的位置信息进行记录,使得机器人在重复应用于同一输电线缆表面的树障清理工作时,能够完全自主运行,无需人工操作管理,从而使得及树障清理机器人的施工更加高效快捷。
附图说明
37.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍。显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
38.图1为基于力反馈的远程操控树障清理机器人设计方法的流程示意图。
具体实施方式
39.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
40.下面结合实施例对本发明作进一步的描述。
41.实施例1
42.本实施例的基于力反馈的远程操控树障清理机器人设计方法,如图1所示,包括以下步骤:
43.步骤1:部署局域网络,使机器人及机器人控制器在部署的局域网络中上线,机器人控制器实时发出的控制命令被机器人接收;
44.步骤2:捕捉步骤1中部署局域网络服务范围位置信息,获取机器人当前爬行输电缆线分布结构及位置信息,分析机器人控制命令可接收范围;
45.步骤3:根据机器人控制命令可接收范围及机器人当前爬行输电缆线位置信息,在局域网络服务范围中进行机器人控制器配置位置的选择;
46.步骤4:在机器人的表面部署力反馈传感器,使力反馈传感器处于机器人当前爬行输电缆线前行方向,实时接收力反馈传感器监测到的作用力;
47.步骤5:对力反馈传感器可感应作用力范围进行划分,获取机器人树障清理工位各项功能,根据力反馈传感器可感应压力范围划分结果对机器人树障清理工位各项功能进行相互配置;
48.步骤6:机器人树障清理工位各项功能根据力反馈传感器实时感应作用力运行,同步对机器人树障清理工位的各项功能在运行时的运行参数进行获取;
49.步骤7:在机器人运行时,识别爬行输电线缆目标位置信息,获取爬行输电线缆目标分布结构,在步骤6的下级子步骤中构建的云端数据库中,捕捉与识别爬行输电线缆目标位置信息及获取爬行输电线缆目标分布结构相匹配的,机器人树障清理工位的功能在运行时的运行参数。
50.实施例2
51.在具体实施层面,在实施例1的基础上,本实施例参照图1所示对实施例1中基于力反馈的远程操控树障清理机器人设计方法做进一步具体说明:
52.步骤1中机器人及机器人控制器在部署的局域网络中上线后,机器人控制器在局域网络中对机器人发出的控制命令在局域网络中实时储存。
53.如图1所示,步骤2与步骤3在进行机器人控制器配置位置的选择时,实时获取机器人当前爬行输电缆线位置信息对应输电缆线区域范围,在输电缆线区域范围内捕捉范围中心位置作为机器人控制器配置位置的选择目标。
54.如图1所示,步骤2与步骤3下级设置有子步骤,包括以下步骤:
55.步骤31:判定输电缆线位置信息对应区域是否较部署的局域网络复位范围大;
56.步骤311;步骤31判定结果为是,跳转步骤1执行对局域网络进行重新部署;
57.步骤32:判定输电缆线位置信息对应区域是否较机器人控制命令可接收范围大;
58.步骤321:步骤32判定结果为是,控制步骤3重复执行;
59.其中,步骤31及步骤32在判定结果为均为否时,在步骤2与步骤3执行结束后,跳转步骤4进一步执行。
60.实施例3
61.在具体实施层面,在实施例1的基础上,本实施例参照图1所示对实施例1中基于力反馈的远程操控树障清理机器人设计方法做进一步具体说明:
62.步骤4中在对机器人部署力反馈传感器时对力反馈传感器设置有监测数据反馈阈值,力反馈传感器在实时监测到作用力数据时,同步与设置的监测数据反馈阈值进行比对,将比对结果储存于步骤4中。
63.如图1所示,步骤5在完成力反馈传感器可感应作用力范围划分结果与机器人树障清理工位各项功能相互配置后,机器人表面部署的力反馈传感器实时监测到的作用力首先与步骤4设置的反馈阈值进行比对,在力反馈传感器监测到的作用力处于反馈阈值范围内后进一步步骤5发送,步骤5将力反馈传感器监测到的作用力与划分的力反馈传感器可感应作用力范围进行匹配,根据匹配结果触发相应的机器人树障清理工位的对应功能运行。
64.如图1所示,步骤6下级设置有子步骤,包括以下步骤:
65.步骤61:构建云端数据库,实时接收步骤6获取到的机器人树障清理工位各项功能
在运行时的运行参数,向构建的云端数据库中发送储存。
66.如图1所示,步骤6中对机器人运行参数的获取内容包括:机器人当前爬行输电缆线位置信息、机器人当前清理树障工位所使用的功能;
67.步骤6在获取机器人运行参数后,对各项运行参数进行相互匹配后打包,步骤61向构建的云端数据库中发送储存的运行参数为步骤6完成打包处理后的运行参数。
68.如图1所示,步骤7在捕捉到匹配项时,驱动机器人树障清理工位的响应功能驱动运行,步骤7在捕捉到匹配项后,机器人被机器人控制器控制运行时,步骤7捕捉到的匹配项于步骤6的子步骤61所构建的云端数据库中删除,并以当前机器人被机器人控制器所控制运行的运行参数数据作为替换目标向云端数据库中发送。
69.综上而言,通过上述实施例中方法的步骤执行,能够为机器人及机器人控制器配置独立的局域网络用于机器人在运行过程中的控制命令的收发,以此有效的维护了机器人运行的稳定,同时通过设定阈值的方式,使得机器人在配置力反馈传感器的状态下不会因大风天气的风级过大而出现机器人树障清理工位功能出现误触发的情况;并且通过进一步的设定阈值使得力反馈传感器的各感应作用力数值与机器人树障清理工位功能进相互匹配,从而通过力反馈传感器实时感应的作用力数值来对机器人树障清理工位功能进行触发,使得机器人具备一定程度的自主运行能力,以此使得树障清理机器人的使用更加智能;此外该方法在步骤的执行过程中还能够对机器人的运行参数进行储存,并在储存时对机器人运行参数时的位置信息进行记录,使得机器人在重复应用于同一输电线缆表面的树障清理工作时,能够完全自主运行,无需人工操作管理,从而使得及树障清理机器人的施工更加高效快捷。
70.以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不会使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1