地下管线管理系统的制作方法
本发明涉及管线管理,尤其涉及一种地下管线管理系统。
背景技术:
1、城市地下管线是城市地下市政基础设施重要组成部分,地下管线的建设是城市安全有序运行的重要基础,是城市高质量发展的重要内容。城市地下管线主要包括供水、雨水、污水、燃气等管线及附属设施等。管线数据是管线分析、可视化应用等的基础。
2、城市地下管网可以抽象为“管线点-管线段”数学模型,现有技术中主要采用“两点一线”的数据结构。管线矢量数据由带有管线段属性、坐标信息的线和带有管线点属性信息、坐标信息的节点数据构成。对于,城市地下管线部分二维矢量数据,存在关键折点未被标记的情况,即在划分管线段时存在将多条连续的有向线划分为一个管线段的情况;同时存在跨线处的关键节点未被标记的情况。
3、现有技术中,针对上述管线数据某些节点未被标记的问题,通常直接忽略未标记的点,或者人工逐条线进行校准。直接忽略某些关键节点必然影响建模效果和分析结果,而人工校准费时费力,效率低,并且换一套新的数据相当于一切从新来做,因此人工逐条校准缺乏可推广性。
技术实现思路
1、鉴于上述的分析,本发明实施例旨在提供一种地下管线管理系统,用以解决现有技术中针对管线数据进行人工逐条校准更新费时费力的问题。
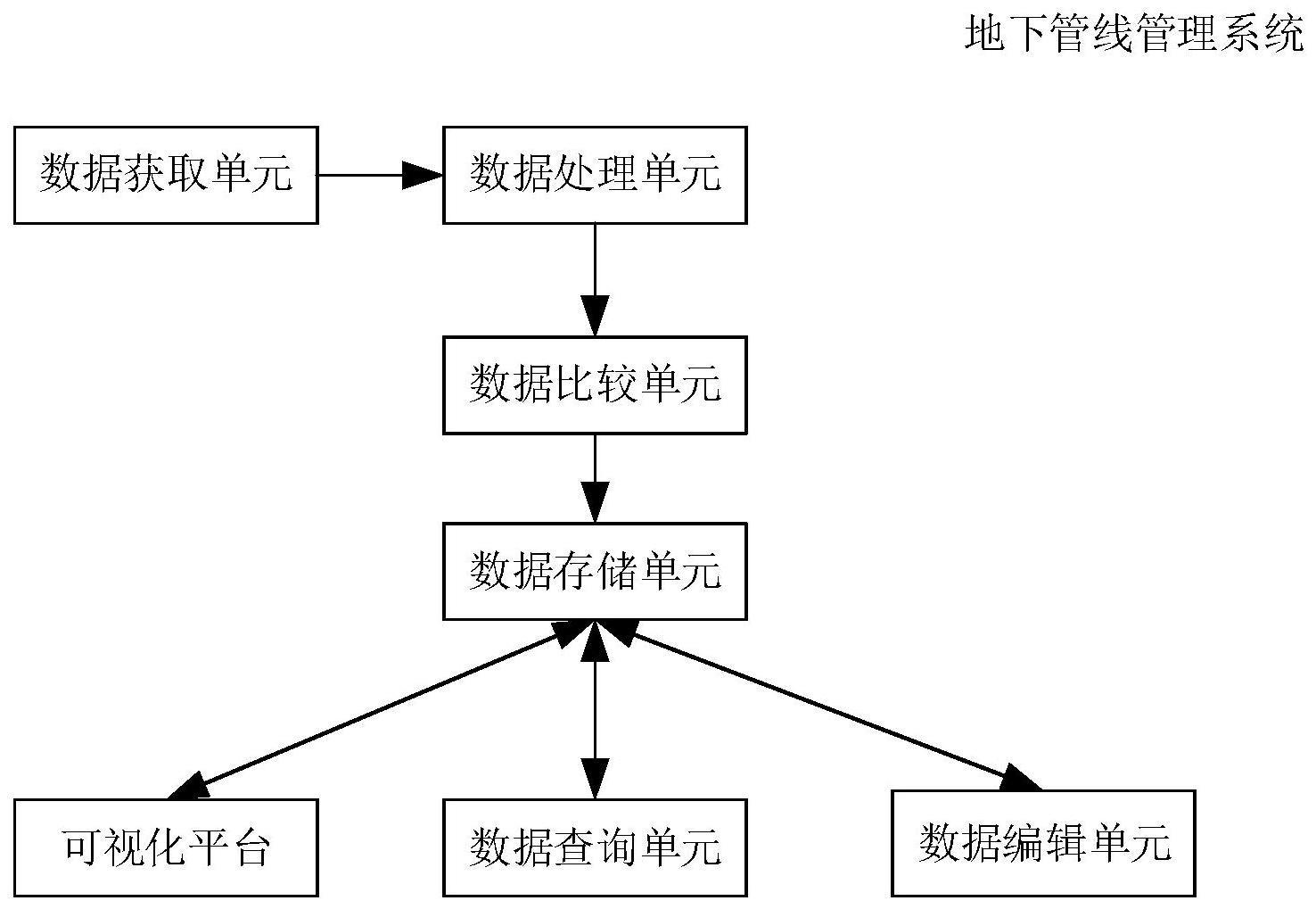
2、本发明实施例提供了一种地下管线管理系统所述管理系统包括:
3、数据获取单元,用于获取新增的折点、跨点;
4、数据存储单元,用于存储原管线数据和更新后的管线数据;管线数据包括管线段矢量数据和管线点矢量数据;
5、数据处理单元,用于利用新增的折点、跨点对原管线段矢量数据中的管线段进行重新划分,并对划分后的所有管线段重新编号,得到第一线矢量数据;基于所述第一线矢量数据,生成与每条管线段对应的两个端点对的数据,即第二点矢量数据;根据原管线点矢量数据对所述第一线矢量数据中的管线点进行编号,获取第三点矢量数据;根据所述第三点矢量数据确定所述第二点矢量数据中每条管线段对应的起终方向,得到所述更新后的管线数据;
6、数据比较单元,用于基于所述原管线数据和所述更新后的管线数据,得到新增的管线数据。
7、基于上述系统的进一步改进,所述管理系统还包括:
8、可视化平台,用于显示所述新增的管线数据供用户查看;还用于接收用户的管线查询信息,并将所述管线查询信息发送至数据查询单元;还用于接收所述数据查询单元发送的管线数据并显示;
9、数据查询单元,用于根据所述管线查询信息在所述数据存储单元中查找相应管线数据发送至所述可视化平台进行显示。
10、基于上述系统的进一步改进,所述管理系统还包括:
11、数据编辑单元,用于根据所述可视化平台发送的删除指令、修改指令对所述数据存储单元中相应的管线数据进行删除、修改。
12、基于上述系统的进一步改进,所述利用新增的折点、跨点对原管线段矢量数据中的管线段进行重新划分,包括:
13、以跨点为分界点,划分所述原管线段矢量数据中存在跨点的管线段;
14、以折点为分界点,划分所述原管线段矢量数据中存在折点的管线段;
15、将划分前的各个管线段的线属性值赋值给划分后的各管线段;所述线属性值包括起点编号和终点编号。
16、基于上述系统的进一步改进,所述将划分前的各个管线段的线属性值赋值给划分后的各管线段,包括:
17、若某个管线段在划分后没有分割,则其线属性值不变;
18、若某个管线段在划分后分割为多个管线段,则将分割前的管线段的线属性值赋值给分割得到的多个管线段。
19、基于上述系统的进一步改进,所述根据原管线点矢量数据对所述第一线矢量数据中的管线点进行编号,获取第三点矢量数据,包括:
20、基于所述第一线矢量数据,利用网络分析工具生成所述第一线矢量数据中所有管线点的数据,得到第一点矢量数据;
21、基于所述原管线点矢量数据,对所述第一点矢量数据进行编号,获取第三点矢量数据。
22、基于上述系统的进一步改进,所述基于所述原管线点矢量数据,对所述第一点矢量数据进行编号,获取第三点矢量数据,包括:
23、在所述第一点矢量数据中找出位置坐标与所述原管线点矢量数据中位置坐标相同的管线点,作为旧管线点,并将原管线点矢量数据中各点的点属性值赋值给各相应的旧管线点,所述点属性值包括物探点编号;
24、将所述第一点矢量数据中除所述旧管线点之外的管线点作为新管线点,对所述新管线点的物探点编号进行编号,得到所述第三点矢量数据。
25、基于上述系统的进一步改进,所述根据所述第三点矢量数据确定所述第二点矢量数据中每条管线段对应的起终方向,得到所述更新后的管线数据,包括:
26、在所述第二点矢量数据中找出位置坐标与所述第三点矢量数据中位置坐标相同的管线点,将所述第三点矢量数据中位置坐标相同的管线点的点属性值映射给第二点矢量数据中各相应的管线点,得到映射后的各管线点的物探点编号;
27、根据映射前的所述第二点矢量数据中各管线段的起点编号、终点编号和映射后的对应的各管线段的两个端点的物探点编号,确定所述第二点矢量数据中各管线段对应的最终的起点编号、终点编号,得到各管线段的管线段编号与其起点编号和终点编号,进一步处理后作为所述更新后的管线数据中的管线段矢量数据;
28、将第三点矢量数据作为所述更新后的管线数据中的管线点矢量数据。
29、基于上述系统的进一步改进,所述根据映射前的所述第二点矢量数据中各管线段的起点编号、终点编号和映射后的对应的各管线段的两个端点的物探点编号,确定所述第二点矢量数据中各管线段对应的最终的起点编号、终点编号,包括:
30、若e_origin[i]=point[i]_1且s_origin[i]=point[i]_2,则end_point[i]=point[i]_1和start_point[i]=point[i]_2;
31、若e_origin[i]=point[i]_2且s_origin[i]=point[i]_1,则end_point[i]=point[i]_2和start_point[i]=point[i]_1;
32、其中,e_origin[i]表示映射前第i个管线段的终点编号,s_origin[i]表示映射前第i个管线段的起点编号;point[i]_1表示映射后第i个管线段的一个端点物探点编号,point[i]_2表示映射后第i个管线段另一个端点物探点编号;end_point[i]表示第i个管线段的最终的终点编号,strart_point[i]表示第i个管线段的最终的起点编号。
33、基于上述系统的进一步改进,所述根据映射前的所述第二点矢量数据中各管线段的起点编号、终点编号和映射后的对应的各管线段的两个端点的物探点编号,确定所述第二点矢量数据中各管线段对应的最终的起点编号、终点编号,还包括:
34、若e_origin[i]=point[i]_1且s_origin[i]≠point[i]_2,则end_point[i]=point[i]_1和start_point[i]=point[i]_2;
35、若e_origin[i]≠point[i]_1且s_origin[i]=point[i]_2,则end_point[i]=point[i]_1和start_point[i]=point[i]_2;
36、若e_origin[i]≠point[i]_2且s_origin[i]=point[i]_1,则end_point[i]=point[i]_2和start_point[i]=point[i]_1;
37、若e_origin[i]=point[i]_2且s_origin[i]≠point[i]_1,则end_point[i]=point[i]_2和start_point[i]=point[i]_1;
38、若e_origin[i]≠point[i]_2且s_origin[i]≠point[i]_1,则根据拓扑关系规律确定end_point[i]和start_point[i]。
39、与现有技术相比,本发明至少可实现如下有益效果之一:
40、1、本发明通过数据处理单元,利用新增的折点、跨点对原管线段矢量数据中的管线段进行重新划分,并对划分后的每条管线段的管线段编号进行重新编号和确定划分后的每条管线段对应的起终方向,实现了对原管线数据的校准更新。
41、2、本发明通过智能化生成原管线数据中未被标记的重要节点,避免了人工逐条对管线段进行检查,提高了数据处理的效率,提供了一种智能化的、高效的、可复制、可推广的地下管线管理系统。
42、本发明中,上述各技术方案之间还可以相互组合,以实现更多的优选组合方案。本发明的其他特征和优点将在随后的说明书中阐述,并且,部分优点可从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过说明书以及附图中所特别指出的内容中来实现和获得。
- 还没有人留言评论。精彩留言会获得点赞!