隧道监测方法、系统、计算机设备和存储介质与流程
本技术涉及计算机,特别是涉及一种隧道监测方法、系统、计算机设备和存储介质。
背景技术:
1、隧道是一种空间狭长、结构封闭和照明条件不佳的特殊构造物,在光线环境、横截面形状和路面摩擦系数等综合因素的影响下,对驾驶员的环境感知与驾驶反应造成障碍,从而导致事故发生率高于普通道路,一旦发生事故,往往会造成交通拥堵与隧道内结构的破坏,后果严重。因此,对隧道中的情况进行实时监测非常重要。
2、传统的隧道监测方法中,一般是采用抽象的二维隧道地图和二维车辆图像,监测画面较为抽象,无法真实地展示隧道内部的真实情况。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够提高监测画面的真实性的隧道监测方法、系统、装置、计算机设备、计算机可读存储介质和计算机程序产品。
2、第一方面,本技术提供了一种隧道监测方法。所述方法包括:
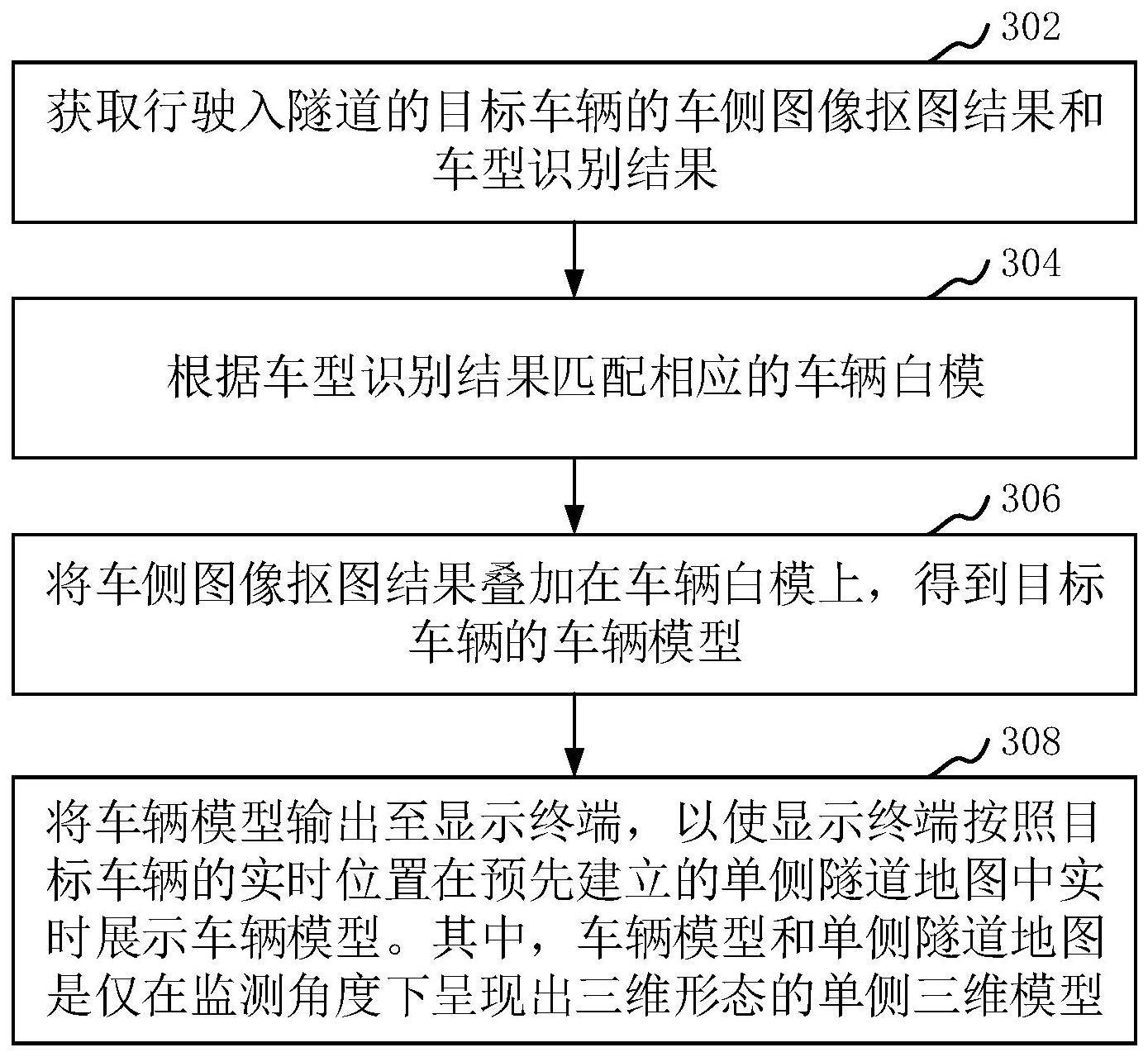
3、获取行驶入隧道的目标车辆的车侧图像抠图结果和车型识别结果;
4、根据所述车型识别结果匹配相应的车辆白模;
5、将所述车侧图像抠图结果叠加在所述车辆白模上,得到所述目标车辆的车辆模型;
6、将所述车辆模型输出至显示终端,以使所述显示终端按照所述目标车辆的实时位置在预先建立的单侧隧道地图中实时展示所述车辆模型;
7、其中,所述车辆模型和所述单侧隧道地图是仅在监测角度下呈现出三维形态的单侧三维模型。
8、第二方面,本技术提供了一种隧道监测系统。所述系统包括第一设备、后台服务器和显示终端,其中:
9、所述第一设备,用于确定行驶入隧道的目标车辆的车侧图像抠图结果和车型识别结果;
10、所述后台服务器,用于根据所述车型识别结果匹配相应的车辆白模;将所述车侧图像抠图结果叠加在所述车辆白模上,得到所述目标车辆的车辆模型;将所述车辆模型输出至显示终端;
11、所述显示终端,用于按照所述目标车辆的实时位置在预先建立的单侧隧道地图中实时展示所述车辆模型;
12、其中,所述车辆模型和所述单侧隧道地图是仅在监测角度下呈现出三维形态的单侧三维模型。
13、在其中一个实施例中,所述后台服务器还用于预先根据所述隧道的二维地图和实地采集数据,建立所述隧道的单侧三维模型;根据隧道中的物体的图像对所述单侧三维模型进行贴图,得到所述预先建立的单侧隧道地图。
14、在其中一个实施例中,所述后台服务器还用于根据隧道中的物体的图像对所述单侧三维模型进行贴图;根据所述实地采集数据,在贴图后的单侧三维模型上绘制车道线,得到所述预先建立的单侧隧道地图,并将所述车辆模型输出至显示终端;
15、所述显示终端还用于按照所述目标车辆的实时位置将所述车辆模型实时展示在预先建立的单侧隧道地图中,使所述车辆模型按照所述车道线在所述单侧隧道地图中移动。
16、在其中一个实施例中,所述第一设备还用于拍摄行驶入隧道的目标车辆的车侧图像,根据所述车侧图像进行抠图处理得到车侧图像抠图结果,并根据所述车侧图像进行车型识别得到车型识别结果;
17、所述后台服务器还用于从安装在所述隧道的入口处的所述第一设备获取行驶入隧道的目标车辆的车侧图像抠图结果和车型识别结果。
18、在其中一个实施例中,所述系统还包括第二设备,其中:
19、所述第二设备用于确定行驶入隧道的目标车辆的车牌识别结果;
20、所述后台服务器还用于根据所述车牌识别结果确定车牌相匹配的车辆的实时位置,将所述车辆模型输出至显示终端;
21、所述显示终端还用于按照相匹配的车辆的实时位置将所述车辆模型实时展示在预先建立的单侧隧道地图中。
22、在其中一个实施例中,所述第二设备还用于拍摄行驶入隧道的目标车辆的车头图像或车尾图像,并根据所述车头图像或车尾图像进行车牌识别,得到车牌识别结果;
23、所述后台服务器还用于从安装在所述隧道的入口处的所述第二设备获取行驶入隧道的目标车辆的车牌识别结果。
24、在其中一个实施例中,若未根据所述车牌识别结果确定出车牌相匹配的车辆,则所述后台服务器还用于将所述车辆模型输出至显示终端;所述显示终端还用于按照与所述目标车辆的进入隧道时间最相近的车辆的实时位置,将所述车辆模型实时展示在预先建立的单侧隧道地图中;
25、在其中一个实施例中,若所述隧道中存在未匹配到车牌识别结果的未匹配车辆,则所述后台服务器还用于确定与所述未匹配车辆的进入隧道时间最相近的车辆的目标车辆模型,并将所述目标车辆模型输出至显示终端;所述显示终端还用于按照所述未匹配车辆的实时位置将所述目标车辆模型实时展示在预先建立的单侧隧道地图中。
26、第三方面,本技术还提供了一种隧道监测装置。所述装置包括:
27、获取模块,用于获取行驶入隧道的目标车辆的车侧图像抠图结果和车型识别结果;
28、白模匹配模块,用于根据所述车型识别结果匹配相应的车辆白模;
29、车辆模型生成模块,用于将所述车侧图像抠图结果叠加在所述车辆白模上,得到所述目标车辆的车辆模型;
30、输出模块,用于将所述车辆模型输出至显示终端,以使所述显示终端按照所述目标车辆的实时位置在预先建立的单侧隧道地图中实时展示所述车辆模型;
31、其中,所述车辆模型和所述单侧隧道地图是仅在监测角度下呈现出三维形态的单侧三维模型。
32、在其中一个实施例中,所述装置还包括:
33、地图建立模块,用于预先根据所述隧道的二维地图和实地采集数据,建立所述隧道的单侧三维模型;根据隧道中的物体的图像对所述单侧三维模型进行贴图,得到所述预先建立的单侧隧道地图。
34、在其中一个实施例中,地图建立模块还用于根据隧道中的物体的图像对所述单侧三维模型进行贴图;根据所述实地采集数据,在贴图后的单侧三维模型上绘制车道线,得到所述预先建立的单侧隧道地图;
35、所述输出模块还用于将所述车辆模型输出至显示终端,以使所述显示终端按照所述目标车辆的实时位置将所述车辆模型实时展示在预先建立的单侧隧道地图中,使所述车辆模型按照所述车道线在所述单侧隧道地图中移动。
36、在其中一个实施例中,所述获取模块还用于从安装在所述隧道的入口处的第一设备获取行驶入隧道的目标车辆的车侧图像抠图结果和车型识别结果;所述第一设备用于拍摄行驶入隧道的目标车辆的车侧图像,根据所述车侧图像进行抠图处理得到车侧图像抠图结果,并根据所述车侧图像进行车型识别得到车型识别结果。
37、在其中一个实施例中,所述获取模块还用于获取行驶入隧道的目标车辆的车牌识别结果;
38、所述输出模块还用于根据所述车牌识别结果确定车牌相匹配的车辆的实时位置;将所述车辆模型输出至显示终端,以使所述显示终端按照相匹配的车辆的实时位置将所述车辆模型实时展示在预先建立的单侧隧道地图中。
39、在其中一个实施例中,所述获取模块还用于从安装在所述隧道的入口处的第二设备获取行驶入隧道的目标车辆的车牌识别结果;所述第二设备用于拍摄行驶入隧道的目标车辆的车头图像或车尾图像,并根据所述车头图像或车尾图像进行车牌识别,得到车牌识别结果。
40、在其中一个实施例中,所述输出模块还用于若未根据所述车牌识别结果确定出车牌相匹配的车辆,则将所述车辆模型输出至显示终端,以使所述显示终端按照与所述目标车辆的进入隧道时间最相近的车辆的实时位置,将所述车辆模型实时展示在预先建立的单侧隧道地图中。
41、在其中一个实施例中,所述输出模块还用于若所述隧道中存在未匹配到车牌识别结果的未匹配车辆,则确定与所述未匹配车辆的进入隧道时间最相近的车辆的目标车辆模型,并将所述目标车辆模型输出至显示终端,以使所述显示终端按照所述未匹配车辆的实时位置将所述目标车辆模型实时展示在预先建立的单侧隧道地图中。
42、第四方面,本技术还提供了一种计算机设备。所述计算机设备包括存储器和处理器,所述存储器中存储有计算机程序,所述计算机程序被所述处理器执行时,使得所述处理器执行本技术各实施例所述的隧道监测方法中的步骤。
43、第五方面,本技术还提供了一种计算机可读存储介质。所述计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时,使得所述处理器执行本技术各实施例所述的隧道监测方法中的步骤。
44、第六方面,本技术还提供了一种计算机程序产品。所述计算机程序产品,包括计算机程序,该计算机程序被处理器执行时,使得所述处理器执行本技术各实施例所述的隧道监测方法中的步骤。
45、上述隧道监测方法、系统、装置、计算机设备、存储介质和计算机程序产品,预先建立仅在监测角度下呈现出三维形态的单侧隧道地图,根据车型识别结果匹配相应的车辆白模,将车侧图像抠图结果叠加在车辆白模上得到目标车辆的车辆模型,且车辆模型也是单侧三维模型,显示终端按照目标车辆的实时位置在预先建立的单侧隧道地图中实时展示车辆模型,由于单侧隧道地图和车辆模型都是仅在监测角度下呈现出三维形态的单侧三维模型,所以,相较于二维的监测画面而言更加真实,提高了针对隧道进行监测的监测画面的真实性。
- 还没有人留言评论。精彩留言会获得点赞!