一种基于多域融合特征的窄带雷达空中目标分类方法与流程
本发明属于雷达。
背景技术:
1、微多普勒效应是目标或者其部件的振动、旋转等微运动形式对回波的频率调制特性,它可以表征一些目标独有的细节。近年来,利用微多普勒效应对空中目标进行分类是雷达目标分类领域的一个研究热点。针对直升机、螺旋桨飞机、喷气式飞机这三类飞机目标,其微动部件的结构,如旋翼长度、转速、个数均有明显区别,导致其窄带雷达回波中的微多普勒调制特性各不相同。
2、目前,利用微动分量特性的差异性来区分不同目标,积累了大量的研究成果。这些研究成果主要集中于两个方面:一是基于物理驱动的分类特征提取,二是基于数据驱动的分类特征提取。无论是哪种方法,特征方面研究都是分类的基础与关键,如杜兰等发表的《基于时域回波相关性特征的飞机目标分类方法》,根据时域回波相关性提取了特征向量,实现了喷气式飞机、螺旋桨飞机和直升机三类飞机目标的分类,如赵越等发表的《一种基于时频分析的窄带雷达飞机目标分类特征提取方法》,提取了多种时域与频域的调制特征进行目标分类。目前大部分研究都仅仅使用单一域的特征,不能够全面反映目标的内在信息,目标分类准确率有限,而某些研究虽然采用了多个域的特征,但未对多域特征进行处理,只是简单地将多域特征送入分类器中对目标进行分类,然而不同域的特征在分类时的贡献度是不同的,而且不同的特征之间并不是完全的独立,存在一定的信息冗余,会影响目标分类的准确性。
技术实现思路
1、本发明提出了一种基于多域融合特征的窄带雷达空中目标分类方法,不仅提取了多种不同域的特征,还对提取的多域特征进行融合处理,使得不同特征之间可以优势互补,从而能够有效地提高空中目标分类的准确率。
2、本发明提出的技术方案具体包括以下步骤:
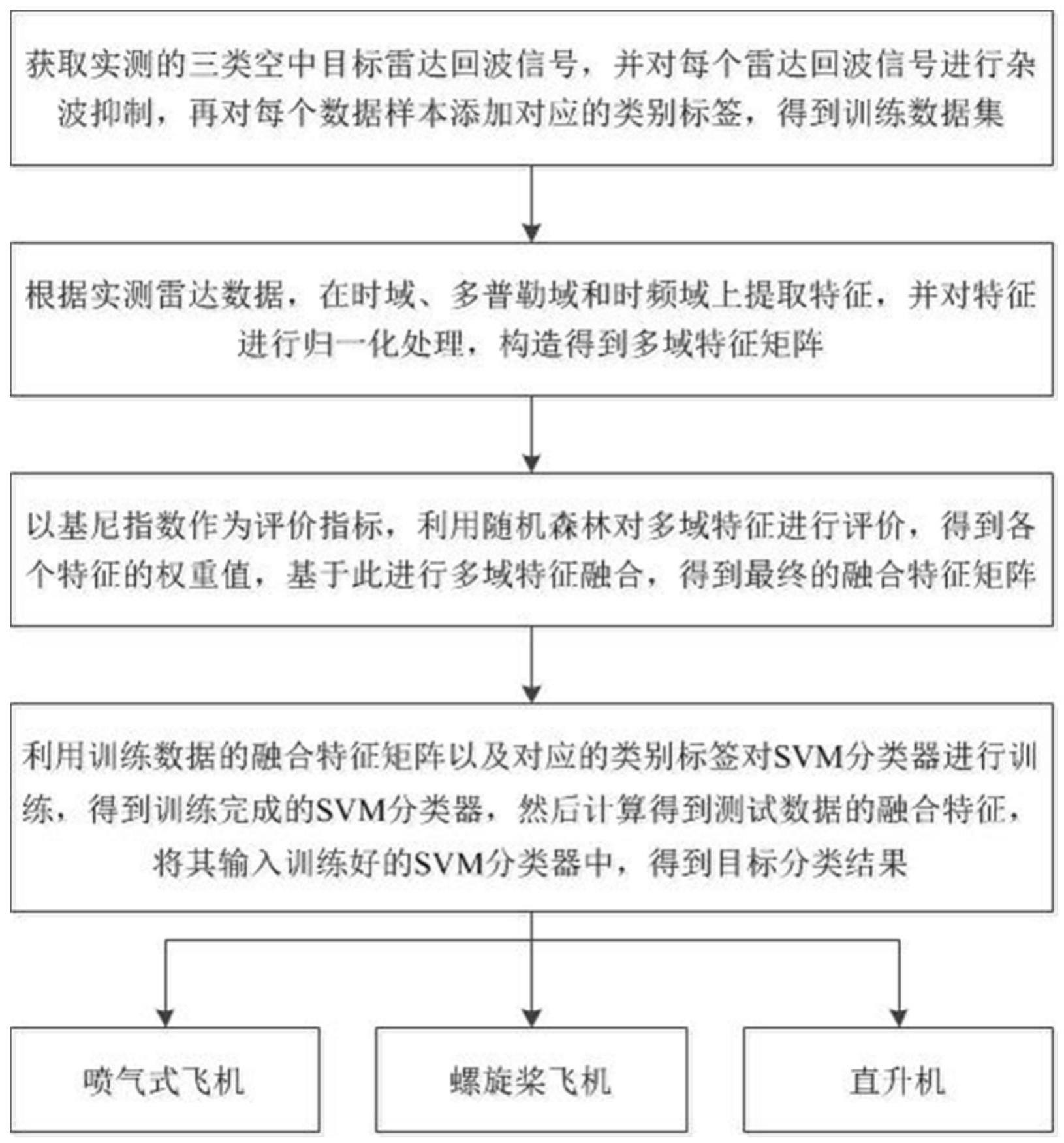
3、步骤1、获取训练数据集:获取实测的三类空中目标雷达回波信号,并对每个雷达回波信号进行杂波抑制,再对每个数据样本添加对应的类别标签,得到训练数据集。
4、步骤2、多域特征提取:根据实测雷达数据,在时域、多普勒域和时频域上提取特征,并对特征进行归一化处理,构造得到多域特征矩阵。
5、步骤3、多域特征融合:以基尼指数作为评价指标,利用随机森林对多域特征进行评价,得到各个特征的权重值,基于此进行多域特征融合,得到最终的融合特征矩阵。
6、步骤4、分类器训练与测试:利用训练数据的融合特征矩阵以及对应的类别标签对svm分类器进行训练,得到训练完成的svm分类器,然后计算得到测试数据的融合特征,将其输入训练好的svm分类器中,得到目标分类结果。
7、进一步的,所述步骤2还包括以下步骤:
8、步骤2.1,计算训练样本中时域回波信号的峰值函数peak(τ),然后提取样本中的峰值函数方差特征f1和峰值函数熵特征f2:
9、
10、式中,s(n)为归一化后的雷达回波数据幅值,最长为nt,时域平移变量可以取值为τ=1,2,...,fix(nt/2),mod(n+τ,nt)表示取整数n+τ除以整数nt后的余数;
11、
12、式中,表示峰值函数的幅值概率,表示峰值函数的均值;
13、
14、式中,表示峰值函数的能量概率;
15、步骤2.2,对每个训练样本中时域回波信号,进行快速傅里叶变换,得到对应的多普勒域回波信号,计算每个训练样本中多普勒域回波信号的波形熵特征f3、方差特征f4和二阶中心距特征;
16、
17、式中,表示在雷达目标的多普勒谱u=(u1,u2,...,uof)中第l个频点上的幅度ul出现的概率,of是多普勒谱点数;
18、
19、式中,表示多普勒域的均值;
20、
21、步骤2.3,对每个训练样本中时域回波信号,进行短时傅里叶变换,得到对应的时频域回波信号,计算每个训练样本中时频域回波信号的方差特征f6和波形熵特征f7;
22、
23、式中,gf,t表示信号进行短时傅里叶变换的幅度,nf表示频率维长度,nt表示时间维长度,表示时频谱的均值;
24、
25、式中,表示幅度归一化时频谱;
26、步骤2.4,将提取的时域特征、频域特征和时频域特征组合生成多域特征矩阵ftrain=[f1…fi…fn]t,fi表示提取的第i个数据样本的特征向量,n为数据样本个数,并对特征矩阵进行归一化处理得到归一化后的特征矩阵归一化处理公式如下:
27、
28、式中,αi表示特征矩阵中的某个特征的一个特征值,αmin为这个特征值中最小值,αmax为这个特征值中最大值。
29、进一步的,所述步骤3还包括以下步骤:
30、步骤3.1、利用随机森林计算特征权值,以基尼指数作为评价指标对步骤2中提取的各个特征进行评价,具体步骤如下:
31、步骤3.1.1、针对步骤2提取的h个特征x1,x2,...,xh,对于每一个特征xj,计算特征xj在节点m上的重要性
32、
33、式中,gim是分枝前节点m的基尼指数,gil和gir则是分枝后两个新节点l和r的基尼指数,基尼指数的计算公式如下:
34、
35、式中,k表示有k个类别,pxk是节点x中类别k所占的比例;
36、步骤3.1.2、如果特征xj在决策树i中出现的节点构成集合e,则xj在第i棵决策树的重要性表示:
37、
38、步骤3.1.3、如果随机森林中有q棵树,计算每个特征xj的基尼指数评分
39、
40、步骤3.2、根据每个特征的评价系数,进行归一化处理,并计算出各个特征的权重值wj,构造得到特征权值矩阵w=diag[w1,w2,...,wh];
41、
42、步骤3.3、基于时域特征、频域特征和时频域特征组合生成的多域特征矩阵根据对应的特征权值矩阵w,计算得到融合特征矩阵
43、进一步的,所述步骤4还包括以下步骤:
44、步骤4.1、将步骤3得到的训练数据的融合特征以及训练数据的样本标签送入带有高斯核的svm分类器中,对带有高斯核的svm分类器的参数进行训练,得到训练好的作为支撑向量的特征向量和相应的权系数,其中,带有高斯核的svm分类器的核参数利用交叉验证法来确定;
45、步骤4.2、依次按照步骤2和步骤3,计算得到测试数据的多域融合特征;
46、步骤4.3、将测试数据的融合特征输入至训练完成的svm分类器中,得到三类空中目标分类结果。
47、本发明的有益效果在于:
48、本发明提出了一种基于多域融合特征的窄带雷达空中目标分类方法,提取了多种不同域的有效特征,与单一特征域相比,能够相对全面地反映目标的特性,充分挖掘不同空中目标间的差异性,然后针对这些多域特征,并未简单地将其送入分类器中对目标进行分类,而是通过随机森林去评价每个特征的重要程度,并根据其重要程度去赋予不同的权值,获得特征权值矩阵,在此基础上进行多域特征融合,能够有效消除特征间存在的信息冗余,并实现了不同域下特征的优势互补,使得本发明方法具有更高的可靠性和准确性。
- 还没有人留言评论。精彩留言会获得点赞!