一种基于点云的障碍物检测方法、装置和域控制器与流程
本发明涉及点云数据处理领域,具体涉及一种基于点云的障碍物检测方法、装置和域控制器。
背景技术:
1、随着自动驾驶技术的研发、应用和商业化进程不断加快,对驾驶安全技术的需求也不断增加。更多封闭场景无人驾驶系统要求去安全员,实现真正的无人驾驶。在无人驾驶系统中,障碍物检测主要通过激光雷达、摄像头、毫米波、超速波等传感器来处理。其中,激光雷达可以得到车辆周围障碍物的深度信息,将检测结果经过跟踪和融合得到最终的检测结果,最后将融合后的检测结果发布给预测模块,预测模块根据道路上的障碍物信息对未来的一段轨迹进行预测。而要知道障碍物凸包形态的形状、大小以及位置,通常的做法是将障碍物点云由三维压缩成二维,然后框成二维凸包的形式发布出去,机器人根据障碍物的二维凸包信息规划避障路径。
2、专利《基于ransac和角点提取的障碍物点云凸包分割方法》(cn114119940a)提出了一种最小凸包法计算包围障碍物的最小多边形边框。具体步骤包括:s1.对障碍物点云进行至少一次降采样、降维处理,以得到预处理后的二维点云;s2.对二维点云进行多次ransac直线点云提取以及欧式聚类,遍历欧式聚类得到的各个点云,进行角点提取;s3.根据二维点云的角点确定重心,同时确定各角点的极角,并根据角点对应的极角对角点进行顺/逆时针排序;s4.遍历排序好的角点,进行凹点判断并发布二维凸包,直至所有角点遍历完;s5.根据凹凸点进行凸包分割,得到障碍物的点云最小凸包。s6.为了适合路径规划等算法的障碍物跟踪和融合,再根据最小凸包计算最小矩形,将不规则的最小凸包转换为规则的矩形,得到障碍物边框,并利用障碍物边框表示障碍物。
3、但是点云并不是全部包围障碍物,障碍物越大就会越容易出现点云稀疏的情况,导致障碍物的部分位置存在丢失,所以障碍物越大、凸包尺寸越大,通过最小凸包计算最小矩形的误差就越大,导致使用最小矩形框对障碍物凸包进行包络误差较大,从而障碍物边框误差较大,进而导致无人驾驶车辆规划行驶轨迹不准确。业内另一种策略是采用深度学习方法实现对障碍物的边框检测,但这种方法需要采集和标注大量的数据,而且对于一些没有采集的障碍物类型检测效果不理想。
技术实现思路
1、有鉴于此,本发明实施方式提供了一种基于点云的障碍物检测方法、装置和域控制器,提高了生成障碍物边框的准确度。
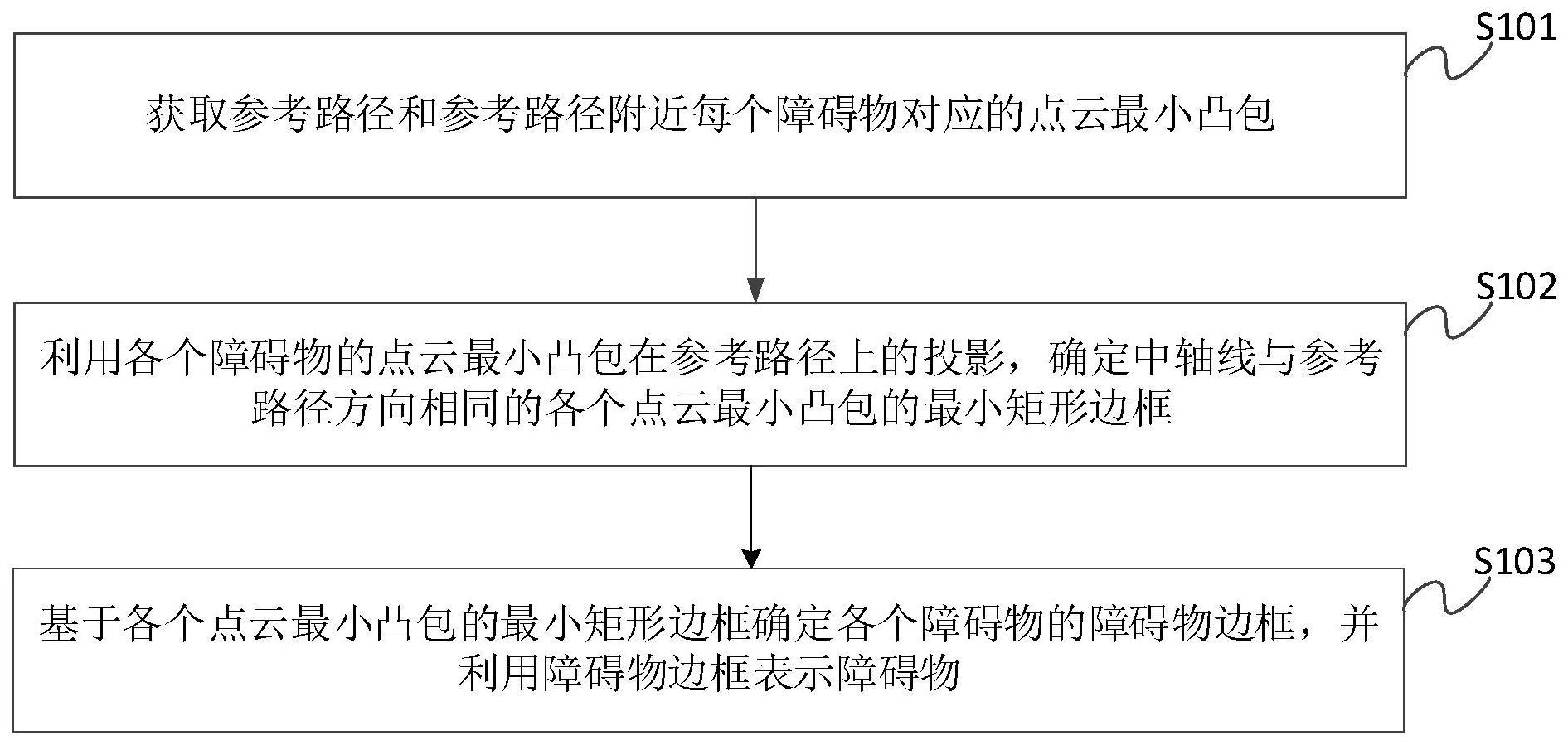
2、根据第一方面,本发明实施例提供了一种基于点云的障碍物检测方法,所述方法包括:获取参考路径和参考路径附近每个障碍物对应的点云最小凸包;利用各个障碍物的点云最小凸包在所述参考路径上的投影,确定中轴线与所述参考路径方向相同的各个点云最小凸包的最小矩形边框;基于各个点云最小凸包的最小矩形边框确定各个障碍物的障碍物边框,并利用所述障碍物边框表示障碍物。
3、可选地,所述利用各个障碍物的点云最小凸包在所述参考路径上的投影,确定中轴线与所述参考路径方向相同的各个点云最小凸包的最小矩形边框,包括:根据所述参考路径的起点坐标和终点坐标确定所述参考路径的路径向量和路径航向角;利用当前点云最小凸包的各个顶点坐标和所述参考路径的起点坐标构建多个参考路径起点到各个凸包顶点的凸包向量;计算各个凸包向量到所述路径向量的投影,并计算各个凸包顶点到所述路径向量的距离;基于计算的投影和距离确定边框长度和边框宽度,所述边框长度和所述边框宽度分别用于表征中轴线与所述参考路径方向相同的当前最小矩形边框的平面长度和平面宽度,所述当前最小矩形边框是所述当前点云最小凸包的最小矩形边框;基于所述边框长度、所述边框宽度、所述路径航向角和所述参考路径的起点坐标,确定用于表征当前最小矩形边框中心的中心坐标;利用所述边框长度、所述边框宽度和所述中心坐标表示当前点云最小凸包的当前最小矩形边框。
4、可选地,所述基于计算的投影和距离确定边框长度和边框宽度,包括:从所述计算的投影和距离中分别提取最长投影、最短投影、最长距离和最短距离;利用所述最长投影和所述最短投影的差值确定所述边框长度,并利用所述最长距离和所述最短距离的差值确定所述边框宽度。
5、可选地,所述基于所述边框长度、所述边框宽度、所述路径航向角和所述参考路径的起点坐标,确定用于表征当前最小矩形边框中心的中心坐标,包括:
6、通过下式计算所述当前最小矩形边框中心的中心坐标
7、
8、式中,wc_j、lc_分别是当前最小矩形边框的一半边框长度和一半边框宽度,xc_j,分别是在大地平面下当前最小矩形边框中心坐标的x坐标和y坐标,所述中心坐标由xc_j,构成,是所述路径航向角,x_start,_分别是所述起点坐标在大地平面下的x坐标和y坐标。
9、可选地,所述基于各个点云最小凸包的最小矩形边框确定各个障碍物的障碍物边框,包括:从当前障碍物的点云数据中获取空间最高点坐标和空间最低点坐标;基于所述空间最高点坐标和所述空间最低点坐标的差值确定边框高度,所述边框高度用于表征当前障碍物边框在地面外的空间高度;利用所述当前最小矩形边框和所述边框高度确定当前障碍物边框。
10、可选地,所述利用所述当前最小矩形边框和所述边框高度表示当前障碍物边框,包括:利用所述边框高度和所述起点坐标确定所述中心坐标的高度;基于确定了高度的中心坐标、所述边框长度、所述边框宽度和所述边框高度表示所述当前障碍物边框。
11、可选地,所述获取参考路径附近每个障碍物对应的点云最小凸包,包括:过滤所述参考路径以外的点云,并采用体素滤波对所述参考路径内的点云进行降采样;对降采样后的点云分割地面上点云和非地面上的点云;对分割得到的非地面上的点云进行聚类,得到每个障碍物对应的点云;基于graham扫描法计算每个障碍物对应的点云最小凸包。
12、根据第二方面,本发明实施例提供了一种基于点云的障碍物检测装置,所述装置包括:数据获取模块,用于获取参考路径和参考路径附近每个障碍物对应的点云最小凸包;矩形边框确定模块,用于利用各个障碍物的点云最小凸包在所述参考路径上的投影,确定中轴线与所述参考路径方向相同的各个点云最小凸包的最小矩形边框;障碍物边框确定模块,用于基于各个点云最小凸包的最小矩形边框确定各个障碍物的障碍物边框,并利用所述障碍物边框表示障碍物。
13、根据第三方面,本发明实施例提供了一种域控制器,包括:感知处理单元、决策处理单元、控制处理单元和通信单元,所述感知处理单元、所述决策处理单元、所述控制处理单元和所述通信单元之间互相通信连接,所述感知处理单元中存储有计算机指令,所述感知处理单元通过执行所述计算机指令,从而执行第一方面,或者第一方面任意一种可选实施方式中所述的方法。
14、根据第四方面,本发明实施例提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使所述计算机从而执行第一方面,或者第一方面任意一种可选实施方式中所述的方法。
15、本技术提供的技术方案,具有如下优点:
16、本技术提供的技术方案,获取参考路径和参考路径附近每个障碍物对应的点云最小凸包;然后计算各个障碍物的点云最小凸包在参考路径上的投影,从而根据投影生成各个点云最小凸包的最小矩形边框,生成的最小矩形边框的中轴线与参考路径方向相同,即根据参考路径方向确定与参考路径朝向相同的最小矩形边框,从而提高点云最小凸包最小矩形边框的准确率。然后基于各个点云最小凸包的最小矩形边框确定各个障碍物的障碍物边框,以提高利用障碍物边框表示障碍物的准确率。
- 还没有人留言评论。精彩留言会获得点赞!