基于环境监测和数值反演的高桩码头桩周冲刷的评估方法
1.本发明涉及高桩码头下部桩基冲刷监测方法,尤其涉及一种基于环境监测和数值反演的高桩码头桩周冲刷的评估方法。
背景技术:
2.港口码头作为水陆联运的重要枢纽工程,逐渐成为各国商品货物交流过程中不可获缺的环节。在众多港口码头型式中,高桩码头由于采用了透空结构,使其可产生较小的波浪反射,且对水流影响较小,因此成为主流港口码头设计形式之一。但是,在波浪和潮流的作用下,高桩码头下部桩基周围海床不可避免地会被冲刷。由于高桩码头上部结构存在一定程度的遮蔽作用,因此其下部桩基结构周围海床在波浪、潮流作用下的冲刷状况不易采用常规方式进行监测。
技术实现要素:
3.发明目的:本发明旨在针对高桩码头下部桩基周围海床冲刷监测难度大的问题,提供一种基于环境监测和数值反演的实时化和全自动化的高桩码头下部桩基周围海床冲刷状况评估方法。
4.技术方案:本发明所述基于环境监测和数值反演的高桩码头桩周冲刷的评估方法,包括以下步骤:
5.(1)划定高桩码头下部桩基周围海床表面高程反演区域;
6.(2)将反演区域在水平面内的投影划分网格,该网格包含的l个节点用于赋予海床表面高程反演数据;
7.(3)构建可反映波浪和潮流作用下土体孔压分布的高桩码头下部桩基周围的海床动力响应数值模型;
8.(4)构建数值算例数据库:根据随机生成的海床表面高程、波浪要素和潮流要素模拟海床内部土体孔压分布,构建以算例编号为主键,以海床表面高程、波浪要素、潮流要素和孔压分布模拟结果为字段的数值算例数据库;
9.(5)根据海床动力响应数值模型和监测装置获取的实时海床内部土体孔压和海域波浪要素及潮流要素,利用粒子群优化算法反演网格节点上的海床表面高程;
10.(6)从最终结果读取各网格节点位置的海床表面高程,减去对应位置在工程修建前的海床表面高程,得到各节点位置处的海床表面高程的变化值;该变化值为负值,则评估为冲刷深度;该变化值为正值,则评估为淤积高度。
11.进一步地,步骤(1)中,反演区域在水平面内的投影为矩形,坐标范围记为(-l
x
,-ly)~(l
x
,ly),并给定该区域内的海床土体地质参数、下部桩基设计参数和码头工程修建前的海床表面高程数据。
12.进一步地,步骤(5)中,监测装置包括高桩码头下部桩基周围的海床内埋设的孔压监测装置、在码头周围设置波浪和潮流监测装置,m个孔压监测装置测量对应土体孔压数据
在一个波浪周期内的平均值分别记为p=[p1,p2,...,pj,...,pm]
t
,其中j∈[1,m]为孔压监测装置的编号。
[0013]
优选地,孔压监测装置采用孔压传感器,埋设深度可以避免因海床表面冲刷而裸漏;波浪监测装置采用浪高仪,浪高仪布置在高桩码头外侧海域进行监测;潮流监测装置采用断面流速仪,断面流速仪布置在高桩码头外侧海域进行监测。
[0014]
进一步地,步骤(5)中,利用粒子群优化算法反演网格节点上的海床表面高程,包括以下步骤:
[0015]
(5.1)初始迭代步(it=1)中,随机生成包含有n个存储网格节点高程的粒子的粒子群,各粒子的位置向量记为x
i,d
(it),对应的速度向量记为v
i,d
(it);
[0016]
其中,位置向量x中每一维分别存储对应网格节点的海床表面高程反演数值,速度向量v中每一维中存储位置向量x中对应维在迭代步中的变化量;i为粒子编号;d为粒子维数,等于水平区域网格节点数量l;it为反演迭代步编号;
[0017]
(5.2)设定第i个粒子在迭代步it中的适应度fi(it),如下:
[0018][0019]
式中,pi(it)=[p
i1
(it),p
i2
(it),...,p
ij
(it),...p
im
(it)]
t
存储每一迭代步it中,将第i个粒子的位置向量x
i,d
(it)存储的海床表面高程和实时波浪要素和潮流要素代入海床动力响应数值模型求解得到的,与实际环境中布置的每个孔压监测装置位置相同的,孔压模拟值在一个波浪周期内的平均值;cov[p,pi(it)]表示协方差;var(p)和var[pi(it)]分别表示方差;
[0020]
第i个粒子在迭代步it前到达过的适应度最优的位置记为pb
i,d
(it),对应的适应度记为f
i,pb
(it);粒子群中在迭代步it前出现过的适应度最高的位置记为gbd(it),对应的适应度记为f
gb
(it);
[0021]
(5.3)后一迭代步中,第i个粒子的位置向量和速度向量如下:
[0022]
x
i,d
(it+1)=x
i,d
(it)+v
i,d
(it+1)
[0023]vi,d
(it+1)=v
i,d
(it)+c1×
rnd
×
[pb
i,d
(it)-x
i,d
(it)]+c2×
rnd
×
[gb
i,d
(it)-x
i,d
(it)]
[0024]
式中,c1和c2为加速常数;rnd为(0,1)区间上满足均匀分布的随机数;
[0025]
(5.4)计算步骤(5.3)中各粒子的适应度;
[0026]
当fi(it+1)>f
i,pb
(it),则pb
i,d
(it+1)=x
i,d
(it+1);
[0027]
当max[f1(it+1),f2(it+1),...,fi(it+1),...,fn(it+1)]>f
gb
(it),则将该迭代步中适应度最高的粒子的位置赋予gbd(it+1);
[0028]
(5.5)重复步骤(5.3)和(5.4),至f
gb
(it)≥0.95为止。
[0029]
进一步地,步骤(5.1)中,初始迭代步(it=1)中,
[0030]
第i个粒子的位置向量为:
[0031]
x
i,d
(it=1)=-d
×
ones(d,1)+2d
×
rnd(d,1);
[0032]
速度向量为:
[0033]vi,d
(it=1)=zeros(d,1);
[0034]
其中,d为高桩码头下部桩基最大直径;rnd(d,1)为d维随机列向量,每一维分别在
(0,1)区间上服从均匀分布;ones(d,1)为d维元素均为1的列向量;zeros(d,1)为d维元素均为0的列向量;
[0035]
从数值算例数据库中选取孔压模拟结果和孔压监测装置实测值的适应度最高的预先求解算例,将该算例中的海床表面高程数据赋给gbd(it=1),pb
i,d
(it=1)的取值与x
i,d
(it=1)相等。
[0036]
进一步地,步骤(5.2)中,每一迭代步it中求解的所有海床动力响应数值模型数值模型算例均会更新至算例数据库中。
[0037]
有益效果:本发明与现有技术相比,具有以下优点:本发明根据波浪、潮流和海床表层冲刷状况对海床土体内部孔压响应的影响,利用海床动力响应数值模型和粒子群优化算法实时反演高桩码头桩基周围海床表面高程,实现实时化、全自动化的高桩码头下部桩基周围海床冲刷状况评估,无需消耗大量人力和物力进行水下探测,能为高桩码头基础结构的安全防护提供参考。
附图说明
[0038]
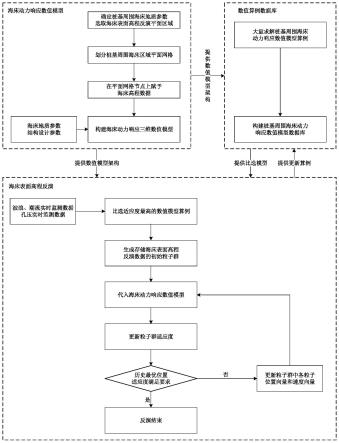
图1为海床动力响应数值模型构建示意图;
[0039]
图2为本发明的流程图。
具体实施方式
[0040]
下面结合附图对本发明作进一步说明。
[0041]
如图1和图2所示,本方法所述基于环境监测和数值反演的高桩码头桩周冲刷评估方法,在实现此方法时需要用到的装置包含孔压传感器、浪高仪、流速仪、高性能计算集群和数据库服务器等。
[0042]
本方法包括如下步骤:
[0043]
(1)划定高桩码头下部桩基周围海床表面高程反演区域,该区域在水平面内的投影为一4边分别与坐标轴平行的矩形,区域坐标范围记为(-l
x
,-ly)~(l
x
,ly),并给定该区域内的海床土体地质参数、下部桩基设计参数和码头工程修建前的海床表面高程数据;
[0044]
(2)将反演区域在水平面内的投影划分网格,该网格包含的l个节点用于赋予海床表面高程反演数据;
[0045]
(3)构建可反映波浪和潮流作用下的土体孔压分布的高桩码头下部桩基周围海床动力响应的三维数值模型;
[0046]
(4)构建数值算例数据库:预先求解s组随机生成的海床表面高程、波浪要素和潮流要素组合的数值算例的海床内部土体孔压分布模拟结果,并构建以算例编号为主键,以海床表面高程、波浪要素、潮流要素和孔压分布模拟结果为字段的数据库来存储这些算例;
[0047]
(5)根据海床动力响应数值模型和监测装置获取的实时海床内部土体孔压和海域波浪要素及潮流要素,利用粒子群优化算法反演网格节点上的海床表面高程;
[0048]
在高桩码头下部桩基周围的海床内埋设m个孔压监测装置,并在码头周围设置波浪和潮流监测装置,用于监测海床内部土体孔压和海域波浪要素及潮流要素等环境信息。
[0049]
各个孔压监测装置所在位置的土体孔压数据在一个波浪周期内的平均值分别记为p=[p1,p2,...,pj,...pm]
t
,其中j∈[1,m]为孔压监测装置的编号;
[0050]
(5.1)初始迭代步(it=1)中,随机生成包含有n个存储网格节点高程的粒子的粒子群,各粒子的位置向量记为x
i,d
(it),对应的速度向量记为v
i,d
(it);
[0051]
其中,位置向量x中每一维分别存储其中一个节点的反演高程,速度向量v中每一维中存储位置向量x中对应维在迭代步中的变化量;i为粒子编号;d为粒子维数,等于水平区域网格节点数量l;it为反演迭代步编号;
[0052]
初始迭代步(it=1)中,
[0053]
第i个粒子的位置向量为:
[0054]
x
i,d
(it=1)=-d
×
ones(d,1)+2d
×
rnd(d,1);
[0055]
速度向量为:
[0056]vi,d
(it=1)=zeros(d,1);
[0057]
其中,d为高桩码头下部桩基最大直径;rnd(d,1)为d维随机列向量,每一维分别在(0,1)区间上服从均匀分布;ones(d,1)为d维元素均为1的列向量;zeros(d,1)为d维元素均为0的列向量;
[0058]
从构建的数据库中选取孔压模拟结果和孔压监测装置实测值的适应度最高的预先求解算例,将该算例中的海床表面高程数据赋给gbd(it=1);pb
i,d
(it=1)的取值与x
i,d
(it=1)相等;
[0059]
(5.2)每一迭代步it中,将第i个粒子的位置向量x
i,d
(it)存储的海床表面高程,结合监测装置实测波浪要素和潮流要素,代入海床动力响应数值模型进行求解,并更新到算例数据库中;将第i个粒子的位置向量x
i,d
(it)存储的海床表面高程和实时波浪要素和潮流要素代入海床动力响应数值模型求解得到的,与实际环境中布置的每个孔压监测装置位置相同的,孔压模拟值在一个波浪周期内的平均值记为:
[0060]
pi(it)=[p
i1
(it),p
i2
(it),
…
,p
ij
(it),
…
p
im
(it)]
t
,
[0061]
粒子的适应度函数根据下式计算:
[0062][0063]
式中,fi(it)为第i个粒子在迭代步it中的适应度;cov(p,pi(it))表示协方差;var(p)和var[pi(it)]分别表示方差;第i个粒子在迭代步it前到达过的适应度最优的位置记为pb
i,d
(it),对应的适应度记为f
i,pb
(it);粒子群中在迭代步it前出现过的适应度最高的位置记为gbd(it),对应的适应度记为f
gb
(it);
[0064]
(5.3)后一迭代步中,第i个粒子的位置向量和速度向量分别按下式计算:
[0065]
x
i,d
(it+1)=x
i,d
(it)+v
i,d
(it+1)
[0066]vi,d
(it+1)=v
i,d
(it)+c1×
rnd
×
[pb
i,d
(it)-x
i,d
(it)]+c2×
rnd
×
[gb
i,d
(it)-x
i,d
(it)]
[0067]
式中,c1和c2为加速常数;rnd为(0,1)区间上满足均匀分布的随机数;
[0068]
(5.4)计算步骤(5.3)中各粒子的适应度;
[0069]
当fi(it+1)>f
i,pb
(it),则pb
i,d
(it+1)=x
i,d
(it+1);
[0070]
当max[f1(it+1),f2(it+1),...,fi(it+1),...,fn(it+1)]>f
gb
(it),则将该迭代步中适应度最高的粒子的位置坐标赋予gbd(it+1);
[0071]
(5.5)重复步骤(5.3)和(5.4),直至f
gb
(it)≥0.95为止;
[0072]
(6)从最终迭代步中的gbd(it)读取各网格节点位置的海床表面高程,并减去对应位置在工程修建前的海床表面高程,得到各节点位置处的海床表面高程变化值:如为负值,则评估为冲刷深度;如为正值,则评估为淤积高度。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1