一种无人车可靠性检测方法、系统、电子设备及存储介质与流程
本技术涉及车辆测试,特别涉及一种无人车可靠性检测方法、系统、电子设备及存储介质。
背景技术:
1、可靠性试验是分析、验证与定量评价产品可靠性的一种手段,主要通过对产品施加诱发应力以及模拟产品在真实工作环境下的工作状态,验证和评估产品可靠性水平。随着装备技术的发展和可靠性理论的成熟,有人车的可靠性试验技术已经发展的相对成熟。
2、无人车通常以远程遥控或是智能自主的方式在特殊环境下进行危险性作业,这种性质的作业往往任务剖面复杂,多种类型作业混合。有人车可靠性试验标准通常是对单一工况下的单一类型作业具有较高的指导意义,故有人车可靠性检测方案不适用于无人车,从而无法使无人车的可靠性水平得到科学全面的考核和评估。
3、因此,如何合理设置无人车的可靠性考核指标,提高无人车可靠性检测的准确性,充分体现无人车可靠性特点是本领域技术人员目前需要解决的技术问题。
技术实现思路
1、本技术的目的是提供一种无人车可靠性检测方法、系统、电子设备及存储介质,能够合理设置无人车的可靠性考核指标,提高无人车可靠性检测的准确性,充分体现无人车可靠性特点。
2、为解决上述技术问题,本技术提供一种无人车可靠性检测方法,该无人车可靠性检测方法包括:
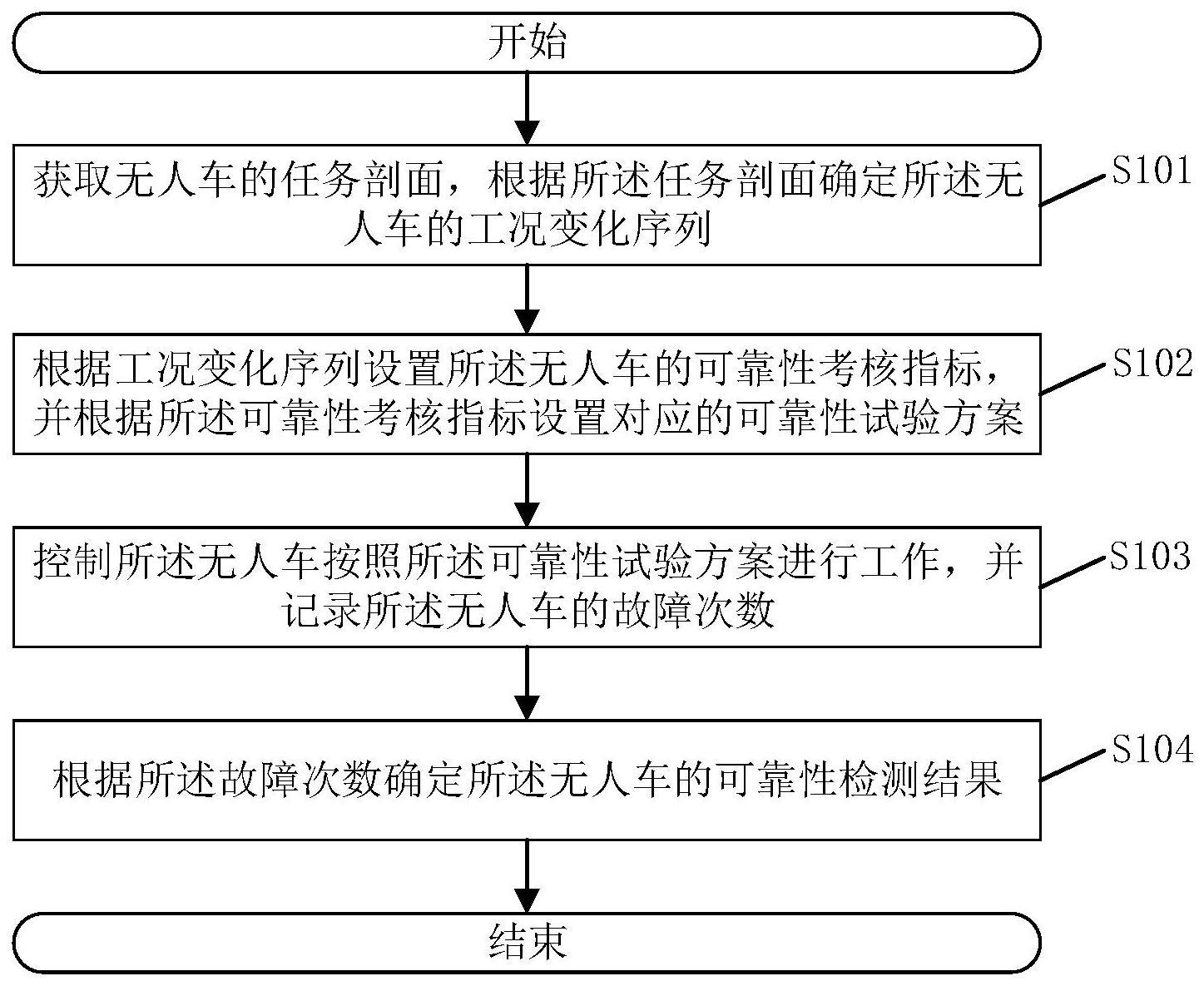
3、获取无人车的任务剖面,根据所述任务剖面确定所述无人车的工况变化序列;其中,所述工况变化序列包括行驶工况和至少两个作业工况;
4、根据所述工况变化序列设置所述无人车的可靠性考核指标,并根据所述可靠性考核指标设置对应的可靠性试验方案;
5、控制所述无人车按照所述可靠性试验方案进行工作,并记录所述无人车的故障次数;
6、根据所述故障次数确定所述无人车的可靠性检测结果。
7、可选的,根据所述工况变化序列设置所述无人车的可靠性考核指标,包括:
8、根据所述工况变化序列确定所述无人车的行驶工况信息和作业工况信息;其中,所述行驶工况信息包括所述无人车在行驶工况下的任务剖面内预计行驶里程和任务剖面内预计行驶时长,所述作业工况信息包括所述无人车在作业工况下的任务剖面内预计作业次数和任务剖面内预计作业时长;
9、获取所述无人车的预计修理周期和客户要求指标;其中,所述客户要求指标包括客户要求的平均故障间隔里程、客户要求的平均故障时间和客户要求的作业次数;
10、根据所述行驶工况信息、所述作业工况信息、所述预计修理周期和所述客户要求指标确定所述无人车的可靠性考核指标;其中,所述可靠性考核指标包括目标平均故障间隔时间、目标平均故障间隔里程和目标无故障作业次数。
11、可选的,根据所述行驶工况信息、所述作业工况信息、所述预计修理周期和所述客户要求指标确定所述无人车的可靠性考核指标,包括:
12、将所述预计修理周期和所述客户要求的平均故障时间中的最大值设置为所述目标平均故障间隔时间;
13、将第一平均故障间隔里程、第二平均故障间隔里程和所述客户要求的平均故障间隔里程中的最大值设置为所述目标平均故障间隔里程;其中,所述第一平均故障间隔里程根据所述预计修理周期、所述任务剖面内预计行驶时长、所述任务剖面内预计作业时长和所述任务剖面内预计行驶里程计算得到,所述第二平均故障间隔里程根据所述客户要求的平均故障时间、所述任务剖面内预计行驶时长、所述任务剖面内预计作业时长和所述任务剖面内预计行驶里程计算得到;
14、将第一平均无故障作业次数、第二平均无故障作业次数和所述客户要求的作业次数中的最大值设置为所述目标无故障作业次数;其中,所述第一平均无故障作业次数根据所述预计修理周期、所述任务剖面内预计行驶时长、所述任务剖面内预计作业时长和所述任务剖面内预计作业次数计算得到,所述第二平均无故障作业次数根据所述客户要求的平均故障时间、所述任务剖面内预计行驶时长、所述任务剖面内预计作业时长和任务剖面内预计作业次数计算得到。
15、可选的,所述无人车包括m个工作装置,所述工作装置与所述作业工况一一对应;
16、相应的,将所述预计修理周期和所述客户要求的平均故障时间中的最大值设置为所述目标平均故障间隔时间,包括:
17、按照第一公式计算所述目标平均故障间隔时间;
18、其中,所述第一公式为t目标=max(t修,t客),t目标表示目标平均故障间隔时间,t修表示预计修理周期,t客表示客户要求的平均故障时间;
19、相应的,将第一平均故障间隔里程、第二平均故障间隔里程和所述客户要求的平均故障间隔里程中的最大值设置为所述目标平均故障间隔里程,包括:
20、按照第二公式计算所述目标平均故障间隔里程;
21、其中,所述第二公式为s目标表示目标平均故障间隔里程,t预表示任务剖面内预计行驶时长,ti表示第i个工作装置的任务剖面内预计作业时长,1≤i≤m,s预表示任务剖面内预计行驶里程,s客表示客户要求的平均故障间隔里程;
22、相应的,将第一平均无故障作业次数、第二平均无故障作业次数和所述客户要求的作业次数中的最大值设置为所述目标无故障作业次数,包括:
23、按照第三公式计算每一所述工作装置对应的目标无故障作业次数;
24、其中,所述第三公式为n目标i表示第i个工作装置的目标无故障作业次数,n预i表示第i个工作装置的任务剖面内预计作业次数,n客i表示客户要求的第i个工作装置的作业次数。
25、可选的,获取所述无人车的预计修理周期,包括:
26、根据所述无人车的系统组成、工作机理、维护规定确定所述无人车的预计修理周期;其中,所述预计修理周期为所述无人车在寿命周期内进行大修级维修的周期。
27、可选的,根据所述可靠性考核指标设置对应的可靠性试验方案,包括:
28、按照无人车行走系统形式确定地区类型比例和路面类型比例,以便生成所述可靠性试验里程分配方案;
29、根据所述可靠性考核指标设置所述可靠性试验里程分配方案的试验里程、试验时长和试验工作次数,得到所述可靠性试验方案。
30、可选的,根据所述故障次数确定所述无人车的可靠性检测结果,包括:
31、判断所述故障次数是否大于故障阈值;
32、若是,则生成拒收所述故障车的可靠性检测结果;
33、若否,则生成接收所述故障车的可靠性检测结果。
34、本技术还提供了一种无人车可靠性检测系统,该系统包括:
35、任务分析模块,用于获取无人车的任务剖面,根据所述任务剖面确定所述无人车的工况变化序列;其中,所述工况变化序列包括行驶工况和至少两个作业工况;
36、方案设置模块,用于根据所述工况变化序列设置所述无人车的可靠性考核指标,并根据所述可靠性考核指标设置对应的可靠性试验方案;
37、检测模块,用于控制所述无人车按照所述可靠性试验方案进行工作,并记录所述无人车的故障次数;
38、结果输出模块,用于根据所述故障次数确定所述无人车的可靠性检测结果。
39、本技术还提供了一种存储介质,其上存储有计算机程序,所述计算机程序执行时实现上述无人车可靠性检测方法执行的步骤。
40、本技术还提供了一种电子设备,包括存储器和处理器,所述存储器中存储有计算机程序,所述处理器调用所述存储器中的计算机程序时实现上述无人车可靠性检测方法执行的步骤。
41、本技术提供了一种无人车可靠性检测方法,包括:获取无人车的任务剖面,根据所述任务剖面确定所述无人车的工况变化序列;其中,所述工况变化序列包括行驶工况和至少两个作业工况;根据所述工况变化序列设置所述无人车的可靠性考核指标,并根据所述可靠性考核指标设置对应的可靠性试验方案;控制所述无人车按照所述可靠性试验方案进行工作,并记录所述无人车的故障次数;根据所述故障次数确定所述无人车的可靠性检测结果。
42、本技术根据无人车的任务剖面确定工况变化序列,基于无人车的工序变化序列设置对应的可靠性考核指标。在得到可靠性考核指标后,本技术根据所述可靠性考核指标设置对应的可靠性试验方案,并进行相应的可靠性试验,得到可靠性检测结果。由于工况变化序列中包括无人车的行驶工况和至少两个作业工况,基于工况变化序列设置的可靠性考核指标能够考虑到无人车的多种作业类型,实现了可靠性考核指标的个性化设置,因此本技术能够合理设置无人车的可靠性考核指标,提高无人车可靠性检测的准确性,充分体现无人车可靠性特点。本技术同时还提供了一种无人车可靠性检测系统、一种存储介质和一种电子设备,具有上述有益效果,在此不再赘述。
- 还没有人留言评论。精彩留言会获得点赞!