基于视频智能识别的测井井场管理系统的制作方法
本发明涉及测井井场管理,特别涉及一种基于视频智能识别的测井井场管理系统。
背景技术:
1、测井井场管理,一般指的是对井场的人员安全进行排查,或者对井场的设备进行定期巡检或排查,以及当出现不符合排查或巡查要求的,应立即停止作业,并对不符合要求的项目进行整改,以保证安全、有效、稳定的进行井场作业;
2、现有的井场管理,主要通过人工对井场安全进行排查,或者人员是否存在违规作业;人工操作存在一定的排查漏洞和时间延迟;例如,a处测井施工人员存在违规作业,人工巡查过程中,未到达a处测井,就无法发现违规作业情况,这样就会给生产作业带来一定的安全隐患;又或者,人工排查过程中出现遗漏的排查点或排查项目,也会对生产作业带来一定的安全隐患;
3、因此缺少一种能够提高测井井场安全管理的系统或方法,以通过系统或方法实现自动监测的目的,从而降低因人工巡查或排查出现漏洞而导致生产作业产生安全隐患的情况。
技术实现思路
1、本发明提供一种基于视频智能识别的测井井场管理系统,用以通过视频智能识别实现测井监测点的自动监测的目的,从而降低因人工巡查或排查出现漏洞而导致生产作业产生安全隐患的情况。
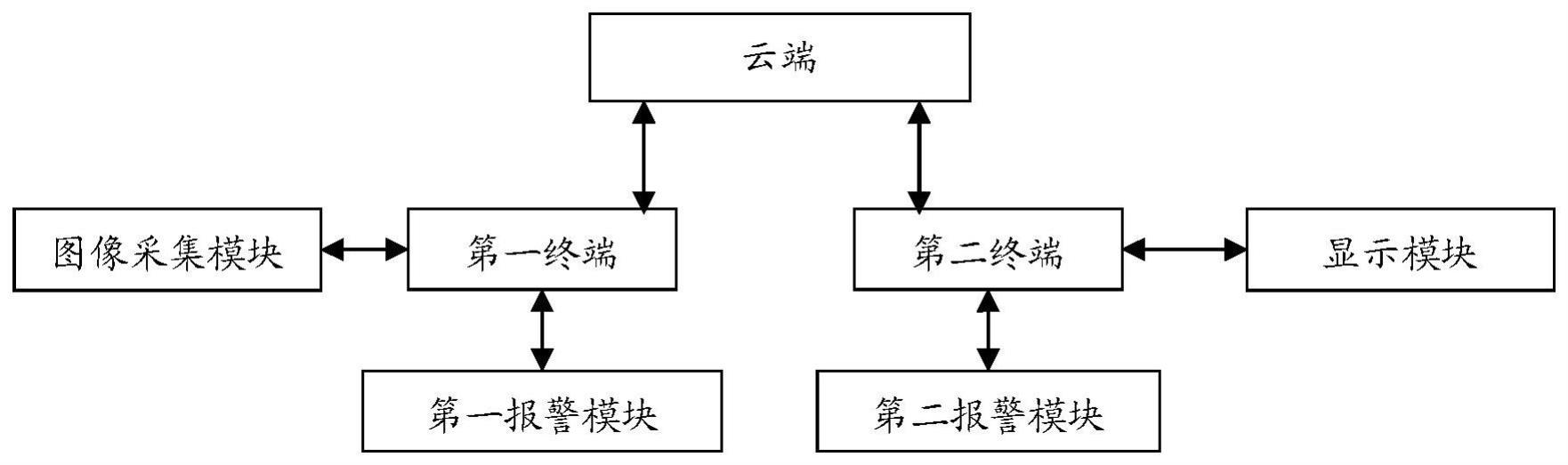
2、本发明提供一种基于视频智能识别的测井井场管理系统,包括:
3、图像采集模块,用于布设在多个监测点,并获取监测点的图像信息;
4、第一终端,用于将图像采集模块所采集的监测点图像信息进行加密存储和本地计算,当出现异常监测时,生成第一报警指令给第一报警模块;
5、以及将所述监测点的本地计算结果加密传输至云端;
6、第二终端,用于从云端获取第一终端传输的本地计算结果,并将计算结果生成图文信息指令发送至显示模块;当图文信息指令中包括第一报警指令时,将第一报警指令发送至第二报警模块。
7、优选的,所述第一报警模块、图像采集模块和第一终端均设置在监测点;
8、且所述监测点还设有第一麦克模块,所述第一麦克模块通过局域网或移动网络连接第二报警模块;
9、所述第二报警模块、第二终端和显示模块均设置在监控室;
10、所述第一报警模块和所述第二报警模块均为扬声器。
11、优选的,所述第一报警指令用于对监测点的违规项目进行报警;并分别用于提示监测点的施工人员或监控室的监控人员进行查看或排除违规项目。
12、优选的,将图像采集模块所采集的监测点图像信息进行本地计算包括:
13、对获取的监测点的图像信息进行成像建模,用于对成像进行失真矫正;
14、将失真矫正后的成像信息与预存信息进行对比,基于对比结果,确定监测点是否存在异常,若存在异常则分别通过第一报警模块和第二报警模块发送第一报警指令。
15、优选的,还包括,通过第一麦克模块获取监测点的语音信息,将语音信息结合图像信息进行违规动作判断;
16、对所述语音信息进行云计算,并获得该语音信息是否为闲聊的判断;若存在闲聊,则发出第一报警指令;
17、以及,利用图像采集模块所采集的图像信息对工人面部表情和身体动作进行违规判断;
18、若工人面部表情存再长时间闭眼、预设时间内频繁闭眼、肢体动作进入危险区域,则发出第一报警指令。
19、优选的,对成像进行失真矫正包括:
20、选取图像采集模块采集的监测点图像信息,其中,图像信息为测井信息,获取测井信息的深度a,内径d;所述图像采集模块为摄像头,获取摄像头距离测井上方的高度h1,构建测井模型;
21、基于测井模型构建测井中心成像模型;基于测井中心成像模型构建测井偏心成像模型;并对测井偏心成像模型进行矫正;
22、利用矫正后的测井偏心成像模型与预存信息进行对比,基于对比结果,确定监测点是否存在异常。
23、优选的,将监测点获取的测井图像信息进行m段的等份分割,并计算监测点中物体到摄像头的间距p:
24、p=m*l1+h1 (1)
25、其中,l1为测井图像信息中m段等份分割的长度;
26、基于间距p构建测井模型。
27、优选的,取测井任意一点k的空间坐标o1(x1,y1,z1),并用于构建测井模型:
28、
29、其中,d为测井内径;a为测井深度;
30、当摄像头中心位于测井中心坐标o(0,0,h1+h2)时,m段的等份分割图像信息中的测井网格成像均为等距同心圆,k点在测井网格成像中的坐标为o2(x2,y2):
31、
32、基于k点在测井网格成像中的坐标为o2(x2,y2),构建测井中心成像模型;
33、其中,p为监测点中物体到摄像头的间距;d为测井内径;
34、当监测点获得的图像信息存在偏移时,摄像头偏移测井中心坐标且位于坐标o(ox2,oy2,h1+h2)时,利用测井中心成像模型构建测井偏心成像模型,则k点在测井网格成像中的坐标为o3(x3,y3):
35、
36、其中,p为监测点中物体到摄像头的间距;d为测井内径;s为偏心间距。
37、优选的,对构建的测井偏心成像模型进行偏移矫正包括:
38、将构建的测井偏心成像模型进行展开,获得测井偏心成像模型的平面模型,基于平面模型,对等份分割的m段的监测点获取的测井图像信息依次进行横向和纵向的矫正,使得相邻两段之间的相交线垂直方向和水平方向进行横平竖直的矫正;再将矫正后的平面模型再次恢复为柱形测井模型,并获得矫正后的柱形测井模型;
39、在矫正后的柱形测井模型中标记监测点,将监测点的图像信息与预存信息进行对比,基于对比结果,确定监测点是否存在异常,若存在异常则分别通过第一报警模块和第二报警模块发送第一报警指令。
40、优选的,对多次的测井偏心成像模型进行对比,并计算测井偏心成像模型的变形误差率,若误差率r大于0,小于1,则不再进行失真矫正,而是将以往矫正的测井偏心成像模型进行统计,基于统计结果提取出多个最靠近平均误差的测井偏心成像信息;
41、再从多个最靠近平均误差的测井偏心成像信息中提取未报警的图像信息作为对比信息;
42、利用该对比信息作为偏心成像图像中的异常报警监测对比;
43、在监测过程中,若对比信息和最新拍摄的监测图像信息的对比结果偏差为u时,则说明最新拍摄的监测图像存在焦距或拍摄方向出现变化,此时定义为t时刻新监测图像,并对t时刻新监测图像进行测井偏心成像模型构建;接着再进行监测位置进行异常监控。
44、本发明的工作原理和有益效果如下:
45、本发明提供一种基于视频智能识别的测井井场管理系统,包括:图像采集模块,用于布设在多个监测点,并获取监测点的图像信息;第一终端,用于将图像采集模块所采集的监测点图像信息进行加密存储和本地计算,当出现异常监测时,生成第一报警指令给第一报警模块;以及将所述监测点的本地计算结果加密传输至云端;第二终端,用于从云端获取第一终端传输的本地计算结果,并将计算结果生成图文信息指令发送至显示模块;当图文信息指令中包括第一报警指令时,将第一报警指令发送至第二报警模块。本发明用以通过视频智能识别实现测井监测点的自动监测的目的,从而降低因人工巡查或排查出现漏洞而导致生产作业产生安全隐患的情况。
46、本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在所写的说明书以及附图中所特别指出的结构来实现和获得。
47、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
- 还没有人留言评论。精彩留言会获得点赞!