本发明涉及煤场远程控制管理领域,涉及到一种基于数据采集的煤场远程控制管理系统。
背景技术:
1、随着煤场规模的逐步扩大,对于煤场的监测管理也愈发显得重要,现有的煤场监测管理方法存在一些弊端:一方面,煤场的煤存储量比较大时,为保证取煤的效率,取煤时一般采用多台斗轮机同时运作,但对于各台斗轮机的任务量分配并不明确,只是根据斗轮机的数量对煤场区域粗略划分进而确定各台斗轮机的工作量,没有综合考虑各斗轮机工作区域的煤存储量、取煤速度和机器调整养护时长等多面因素,分析得到各斗轮机完成取煤任务的预估所需时长,进而判断各斗轮机的工作进度是否基本一致并及时进行任务量的调整,进而无法确保各斗轮机同步完成取煤任务、进度统一,可能后续出现斗轮机闲置或斗轮机任务量超额的现象,从而大大降低煤场整体工作效率。
2、另一方面,在对斗轮机的斗轮转速进行调控时,一般将斗轮机的实际斗轮转速与设定的斗轮转速进行比较,进而对斗轮机的斗轮转速进行调节,没有考虑斗轮机取煤时煤堆的状态,斗轮推进煤堆的深度和煤堆自身的堆积陡峭程度,都会加速煤堆坍塌,此时就要减缓斗轮的转速,防止斗轮因大量煤堆积轮内而出现卡轮,进而不能实现在保证斗轮正常运转的前提下对斗轮提速,提高取煤效率。
技术实现思路
1、针对上述问题,本发明提出了一种基于数据采集的煤场远程控制管理系统,实现对煤场远程控制管理的功能。
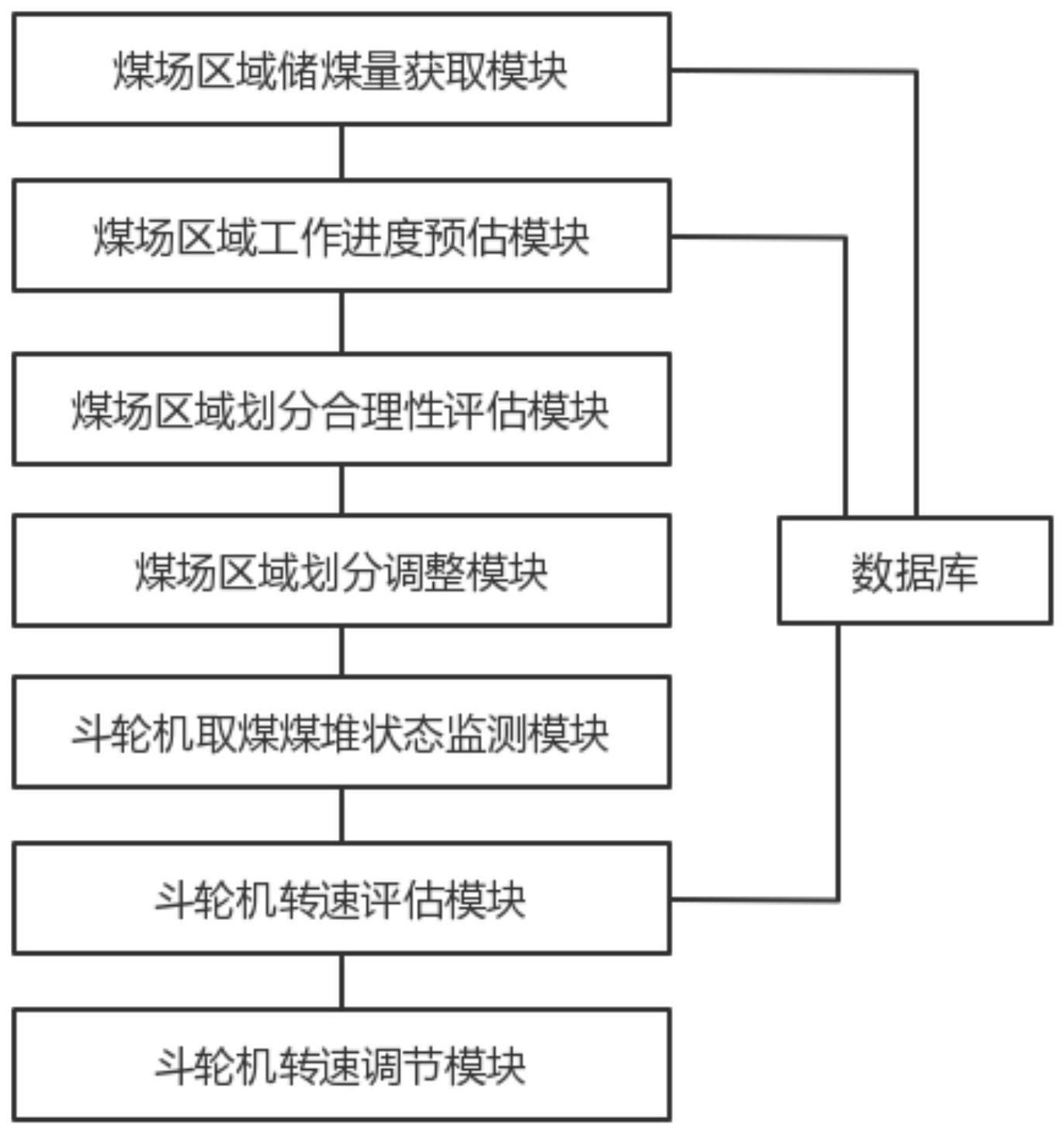
2、本发明解决其技术问题采用的技术方案是:本发明提供一种基于数据采集的煤场远程控制管理系统,包括:煤场区域储煤量获取模块:用于按照预设的原则对目标煤场区域进行初次划分,得到各煤场子区域,获取各煤场子区域的储煤量。
3、煤场区域工作进度预估模块:用于根据各煤场子区域的储煤量,分析得到各煤场子区域完成取煤任务预估需要的时长,将其记为各煤场子区域的预估取煤所需时长。
4、煤场区域划分合理性评估模块:用于根据各煤场子区域的预估取煤所需时长,判断各煤场子区域的区域划分是否合理,若不合理,将区域划分不合理的各煤场子区域记为各标记煤场子区域,并则执行煤场区域划分调整模块。
5、煤场区域划分调整模块:用于获取各标记煤场子区域的预估取煤所需时长,得到各进度滞后煤场子区域和各进度超前煤场子区域,对各进度滞后煤场子区域和各进度超前煤场子区域的划分进行调整。
6、斗轮机取煤煤堆状态监测模块:用于实时监测各煤场子区域中斗轮机取煤过程中煤堆的状态,将其记为各斗轮机取煤的煤堆状态,分析得到各斗轮机取煤的煤堆坍塌系数。
7、斗轮机转速评估模块:用于根据各斗轮机取煤的煤堆坍塌系数,分析得到各斗轮机的适宜斗轮转速,获取各斗轮机的实际斗轮转速,进而判断各斗轮机的斗轮转速是否需要调节,若需要调节,将斗轮转速需要调节的各斗轮机记为各指定斗轮机,并执行斗轮机转速调节模块。
8、斗轮机转速调节模块:用于获取各指定斗轮机斗轮转速的调节参数,其中调节参数包括调节趋向和调节校正量,并进行相应处理。
9、数据库:用于存储目标煤场中煤的参考密度、斗轮机单位时间的取煤量和斗轮机取煤的参考斗轮转速。
10、在上述实施例的基础上,所述煤场区域储煤量获取模块的具体过程为:按照预设的网格化划分原则对目标煤场区域进行划分,得到各煤场子区域,按照预设的原则在各煤场子区域中斗轮机表面布设各三维激光扫描仪,通过各煤场子区域中斗轮机表面布设的各三维激光扫描仪,获取各煤场子区域中各煤堆的三维数据模型,进一步得到各煤场子区域中各煤堆的体积,将其记为vij,i表示第i个煤场子区域的编号,i=1,2,...,n,j表示煤场子区域中第j个煤堆的编号,j=1,2,...,m。
11、提取数据库中存储的目标煤场中煤的参考密度,将其记为ρ,将各煤场子区域中各煤堆的体积代入公式aij=β*(ρ*vij+δa)得到各煤场子区域中各煤堆的煤存储量aij,其中β表示预设的煤存储量的修正因子,δa表示预设的煤存储量的补偿量。
12、将各煤场子区域中各煤堆的煤存储量进行累加,得到各煤场子区域的储煤量,将其记为bi。
13、在上述实施例的基础上,所述煤场区域工作进度预估模块的具体过程包括:提取数据库中存储的斗轮机单位时间的取煤量,将其记为c,将各煤场子区域的储煤量bi代入公式得到各煤场子区域斗轮机的取煤工作时长其中χ1表示预设的斗轮机取煤工作时长的修正因子。
14、获取各煤场子区域中各煤堆的位置,规划各煤场子区域中斗轮机取煤的行驶路径,根据各煤场子区域中斗轮机取煤的行驶路径,得到各煤场子区域中斗轮机的位置调整次数,将其记为di,通过分析公式得到各煤场子区域斗轮机的机器调整时长其中χ2表示预设的斗轮机机器调整时长的修正因子,δτ表示预设的斗轮机单次位置调整所需时长。
15、在上述实施例的基础上,所述煤场区域工作进度预估模块的具体过程还包括:将各煤场子区域斗轮机的取煤工作时长和机器调整时长代入公式得到各煤场子区域的预估取煤所需时长其中χ3表示预设的预估取煤所需时长的修正因子,t1表示预设的斗轮机设备养护休整所需时长,t2表示预设的预估取煤所需时长的补偿量。
16、在上述实施例的基础上,所述煤场区域划分合理性评估模块的具体过程为:将各煤场子区域的预估取煤所需时长进行相互比较,获取预估取煤所需时长的中位数,将其记为t′,将各煤场子区域的预估取煤所需时长代入公式得到各煤场子区域的工作进度差异系数δi,其中ε表示预设的工作进度差异系数修正因子,t表示预设的允许取煤所需时长差值。
17、将各煤场子区域的工作进度差异系数与预设的工作进度差异系数阈值进行比较,若某煤场子区域的工作进度差异系数大于预设的工作进度差异系数阈值,则该煤场子区域的区域划分不合理,统计区域划分不合理的各煤场子区域,将其记为各标记煤场子区域,并则执行煤场区域划分调整模块。
18、在上述实施例的基础上,所述煤场区域划分调整模块的具体过程包括:根据各煤场子区域的预估取煤所需时长,筛选得到各标记煤场子区域的预估取煤所需时长。
19、将各标记煤场子区域的预估取煤所需时长与预估取煤所需时长中位数进行比较,若某标记煤场子区域的预估取煤所需时长大于预估取煤所需时长中位数,将该标记煤场子区域记为进度滞后煤场子区域,若某标记煤场子区域的预估取煤所需时长小于预估取煤所需时长中位数,将该标记煤场子区域记为进度超前煤场子区域,统计得到各进度滞后煤场子区域和各进度超前煤场子区域。
20、在上述实施例的基础上,所述煤场区域划分调整模块的具体过程还包括:根据各进度滞后煤场子区域的位置,得到各进度滞后煤场子区域的各相邻煤场子区域,根据各煤场子区域的储煤量,筛选得到各进度滞后煤场子区域对应的各相邻煤场子区域的储煤量,将各进度滞后煤场子区域对应的各相邻煤场子区域的储煤量进行相互比较,将最小储煤量对应的相邻煤场子区域记为进度滞后煤场子区域的匹配相邻煤场子区域,统计得到各进度滞后煤场子区域的匹配相邻煤场子区域。
21、根据各煤场子区域的预估取煤所需时长,筛选得到各进度滞后煤场子区域的预估取煤所需时长,将其记为f表示第f个进度滞后煤场子区域的编号,f=1,2,...,g,将各进度滞后煤场子区域的预估取煤所需时长代入公式得到各进度滞后煤场子区域的划出煤量其中φ1表示预设的划出煤量的修正因子,δt″表示预设的取煤所需时长修正量。
22、将各进度滞后煤场子区域中各煤堆按照预设的顺序进行排序,得到各进度滞后煤场子区域中各煤堆的划出顺序。
23、根据各煤场子区域中各煤堆的煤存储量,筛选得到各进度滞后煤场子区域中各煤堆的煤存储量,将各进度滞后煤场子区域中各煤堆按照划出顺序依次划分至其对应的匹配相邻煤场子区域,直至划分至某煤堆时,排序在该煤堆之前的各煤堆煤存储量的累加量小于或等于进度滞后煤场子区域的划出煤量,且排序在该煤堆相邻下一煤堆之前的各煤堆煤存储量的累加量大于进度滞后煤场子区域的划出煤量,进而对各进度滞后煤场子区域的划分进行调整。
24、获取各进度超前煤场子区域的划进煤量和各进度超前煤场子区域对应匹配相邻煤场子区域中各煤堆的煤存储量,进而对各进度超前煤场子区域的划分进行调整。
25、在上述实施例的基础上,所述斗轮机取煤煤堆状态监测模块的具体过程为:通过高清摄像机获取各煤场子区域中斗轮机当前取煤煤堆的侧面图像,将其记为各斗轮机当前取煤煤堆的侧面图像,进而得到各斗轮机取煤煤堆的第一腰跨宽、第二腰跨宽、第一腰线长、第二腰线长和堆积高度,并分别表示为和lp,p表示第p个斗轮机的编号,p=1,2,...,q。
26、通过测量仪器获取各斗轮机取煤过程中斗轮中心点距离地面高度,将其记为各斗轮机的斗轮距离地面高度,并表示为并获取各斗轮机的斗轮水平推进煤堆的深度,将其记为各斗轮机的水平推进深度,并表示为
27、通过分析公式得到各斗轮机取煤的煤堆坍塌系数其中γ表示预设的煤堆坍塌系数的修正因子。
28、在上述实施例的基础上,所述斗轮机转速评估模块的具体过程为:提取数据库中存储的斗轮机取煤的参考斗轮转速,将其记为v参考,将各斗轮机取煤的煤堆坍塌系数和斗轮机取煤的参考斗轮转速v参考代入公式得到各斗轮机的适宜斗轮转速其中η表示预设的适宜斗轮转速修正因子,e表示自然常数,表示预设的煤堆坍塌系数阈值。
29、通过各斗轮机控制中心的仪表盘获取各斗轮机的实际斗轮转速,将其记为
30、将各斗轮机的适宜斗轮转速和实际斗轮转速代入公式得到各斗轮机的斗轮转速调节需求系数λp,其中δv设表示预设的允许斗轮转速差值。
31、将各斗轮机的斗轮转速调节需求系数与预设的斗轮转速调节需求系数阈值进行比较,若某斗轮机的斗轮转速调节需求系数大于预设的斗轮转速调节需求系数阈值,则该斗轮机的斗轮转速需要调节,统计得到斗轮转速需要调节的各斗轮机,将其记为各指定斗轮机,并执行斗轮机转速调节模块。
32、在上述实施例的基础上,所述斗轮机转速调节模块的具体过程为:f1:根据各斗轮机的适宜斗轮转速和实际斗轮转速,筛选得到各指定斗轮机的适宜斗轮转速和实际斗轮转速,将各指定斗轮机的实际斗轮转速与其对应的适宜斗轮转速进行比较,若某指定斗轮机的实际斗轮转速大于其对应的适宜斗轮转速,则该指定斗轮机斗轮转速的调节趋向为减小,并执行f2,若某指定斗轮机的实际斗轮转速小于其对应的适宜斗轮转速,则该指定斗轮机斗轮转速的调节趋向为增大,并执行f3。
33、f2:将该指定斗轮机的实际斗轮转速减去其对应的适宜斗轮转速,得到该指定斗轮机斗轮转速的调节校正量。
34、f3:将该指定斗轮机的适宜斗轮转速减去其对应的实际斗轮转速,得到该指定斗轮机斗轮转速的调节校正量。
35、f4:以此类推,得到各指定斗轮机斗轮转速的调节趋向和调节校正量,并将其发送至目标煤场远程控制终端,进而对各指定斗轮机的斗轮转速进行调控。
36、相对于现有技术,本发明所述的一种基于数据采集的煤场远程控制管理系统以下有益效果:1.本发明提供的一种基于数据采集的煤场远程控制管理系统,通过获取各煤场子区域的预估取煤所需时长,进而判断各煤场子区域的区域划分是否合理,并对煤场区域的划分进行调整;获取各斗轮机的适宜斗轮转速和实际斗轮转速,从而判断各斗轮机的斗轮转速是否需要调节,并获取各指定斗轮机斗轮转速的调节参数,实现对煤场取煤任务量的明确分配,提高煤场整体工作效率,同时实现对斗轮机斗轮速度的智能调节,既保证斗轮的正常运转又兼顾取煤效率。
37、2.本发明通过获取各煤场子区域的预估取煤所需时长,进而判断各煤场子区域的区域划分是否合理,进一步对各进度滞后煤场子区域和各进度超前煤场子区域的划分进行调整,综合考虑各斗轮机工作区域的煤存储量、取煤速度和机器调整养护时长等多面因素,分析得到各斗轮机完成取煤任务的预估所需时长,进而判断各斗轮机的工作进度是否基本一致并及时进行任务量的调整,进而确保各斗轮机同步完成取煤任务、进度统一,防止后续出现斗轮机闲置或斗轮机任务量超额的现象,从而提高煤场整体工作效率。
38、3.本发明通过获取各斗轮机的适宜斗轮转速和实际斗轮转速,进而判断各斗轮机的斗轮转速是否需要调节,并获取各指定斗轮机斗轮转速的调节参数,综合考虑斗轮机取煤时煤堆的状态,斗轮推进煤堆的深度和煤堆自身的堆积陡峭程度,分析是否减缓斗轮的转速,得到适宜斗轮转速,防止斗轮因大量煤堆积轮内而出现卡轮,进而在保证斗轮正常运转的前提下对斗轮提速,提高取煤效率。