一种场端调度方法、装置、系统和部件与流程
本发明涉及信号处理,特别涉及一种场端调度方法、装置、系统和部件。
背景技术:
1、现有技术中,车辆需要进行补能时,一般是车辆行驶进补能场站,车辆驾驶人员在驾驶车辆行驶过程中,寻找充电口,这种方式往往导致多个车辆在场端行驶混乱,为了避免这种混乱,场内有时需要安排调度人员来引导车辆行驶至充电口或者加油口,由专人引导造成人力资源浪费。
2、因此,如何在车辆行驶进场端后,引导车辆有序的行驶至桩位,包括充电桩位和加油桩位,成为急需解决的问题。
技术实现思路
1、本发明的目的,就是针对现有技术的缺陷,提供场端调度方法、装置、系统和部件,以解决现有技术中的如何引导车辆有序的在场端行驶的问题。
2、为实现上述目的,本发明实施例第一方面提供了一种场端调度方法,所述方法包括:
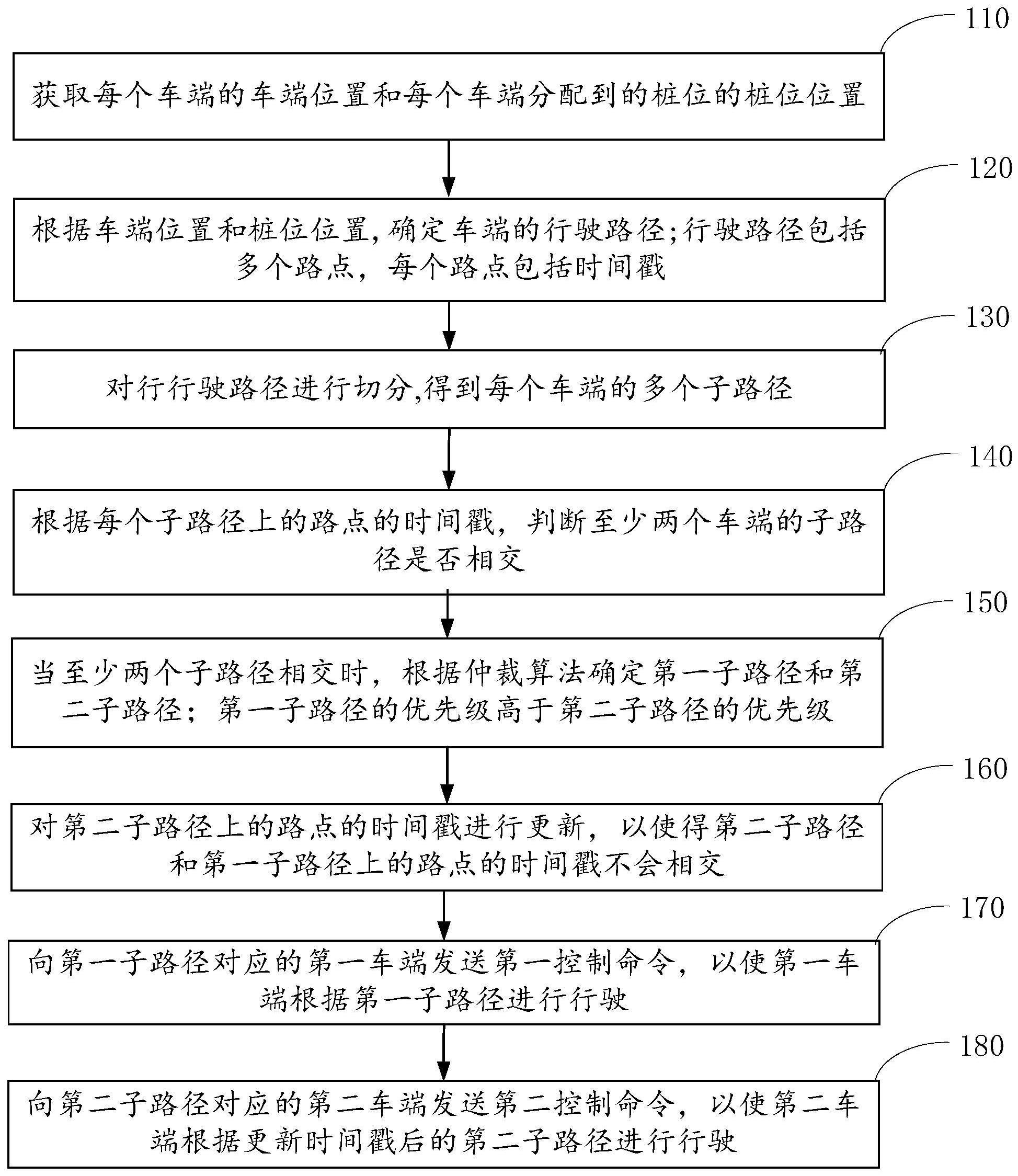
3、获取每个车端的车端位置和每个车端分配到的桩位的桩位位置;
4、根据所述车端位置和所述桩位位置,确定车端的行驶路径;所述行驶路径包括多个路点,每个路点包括时间戳;
5、对所述行行驶路径进行切分,得到每个车端的多个子路径;
6、根据每个子路径上的路点的时间戳,判断至少两个车端的子路径是否相交;
7、当至少两个所述子路径相交时,根据仲裁算法确定第一子路径和第二子路径;其中,所述第一子路径的优先级高于所述第二子路径的优先级;
8、对所述第二子路径上的路点的时间戳进行更新,以使得所述第二子路径5和所述第一子路径上的路点的时间戳不会相交;
9、向所述第一子路径对应的第一车端发送第一控制命令,以使所述第一车端根据所述第一子路径进行行驶;
10、向所述第二子路径对应的第二车端发送第二控制命令,以使所述第二车端根据更新时间戳后的第二子路径进行行驶。
11、0在一种可能的实现方式中,所述仲裁算法具体包括:
12、根据两个车端的车牌号确定第一子路径和第二子路径;和/或,
13、根据两个车端中会员优先原则确定第一子路径和第二子路径;或者,
14、根据两个车端的剩余能量确定第一子路径和第二子路径。
15、在一种可能的实现方式中,每个路点还包括行驶速度和方向,所述对所5述第二子路径上的路点的时间戳进行更新具体包括:
16、根据所述第一子路径的路点的时间戳、行驶速度和行驶方向,计算车辆驶离第一子路径的时长;
17、根据所述时长,更新所述第二子路径上的每个路点的时间戳。
18、在一种可能的实现方式中,所述根据所述时长,更新所述第二子路径上0的每个路点的时间戳具体包括:
19、将所述时长和所述第二子路径上每个路点的时间戳进行叠加,以更新所述第二子路径的路点的时间戳。
20、在一种可能的实现方式中,所述根据所述车端位置和所述桩位位置,确定车端的行驶路径具体包括:5根据所述车端位置、所述桩位位置、场端的地图和实时的环境感知信息,
21、确定每个车端的行驶路径;其中,所述实时的环境感知信息是根据接收到的场端的多种传感器的数据进行融合所得到的。
22、在一种可能的实现方式中,所述获取每个车端的车端位置具体包括:
23、当车端进入场端时,获取车端上的标签与场端的至少三个基站进行通信时的第一信号、第二信号和第三信号;
24、根据所述第一信号、第二信号和第三信号,以及所述基站在场端坐标系中的位置,确定车辆在场端坐标系中的第一位置;和/或,
25、当车辆上的gps信号的信号强度符合要求时,获取地球坐标系的所述gps信号;
26、将所述gps信号转换为场端坐标系中的第二位置;
27、根据所述第一位置和所述第二位置,确定车端的位置。
28、在一种可能的实现方式中,所述根据所述第一信号、第二信号和第三信号,以及所述基站在场端坐标系中的位置,确定车辆在场端坐标系中的第一位置具体包括:
29、根据所述第一信号,确定所述基站中的第一基站与所述标签的第一距离;
30、根据所述第二信号,确定所述基站中的第二基站与所述标签的第二距离;
31、根据所述第三信号,确定所述基站中的第三基站与所述标签的第三距离;
32、根据所述第一距离、所述第二距离和所述第三距离,以及所述第一基站的位置、第二基站的位置和第三基站的位置,通过三角定位方法确定所述标签在所述场端坐标系的第一位置。
33、在一种可能的实现方式中,当所述车端进入所述场端时,所述场端的基站与所述车端的标签建立uwb通信链接;
34、当所述车端进入所述场端时,所述场端的控制器与所述车端的控制器建立无线通信链接。
35、本发明实施例第二方面提供了一种用于实现本发明实施例第一方面的场端调度方法的场端调度装置,所述场端调度装置包括:
36、第一获取模块,所述第一获取模块用于获取每个车端的车端位置和每个车端分配到的桩位的桩位位置;
37、确定模块,所述确定模块用于根据所述车端位置和所述桩位位置,确定车端的行驶路径;所述行驶路径包括多个路点,每个路点包括时间戳;
38、切分模块,所述切分模块用于对所述行行驶路径进行切分,得到每个车端的多个子路径;
39、判断模块,所述判断模块用于根据每个子路径上的路点的时间戳,判断至少两个车端的子路径是否相交;
40、仲裁模块,所述仲裁模块用于当至少两个所述子路径相交时,根据仲裁算法确定第一子路径和第二子路径;其中,所述第一子路径的优先级高于所述第二子路径的优先级;
41、更新模块,所述更新模块用于对所述第二子路径上的路点的时间戳进行更新,以使得所述第二子路径和所述第一子路径上的路点的时间戳不会相交;
42、第一发送模块,所述第一发送模块用于向所述第一子路径对应的第一车端发送第一控制命令,以使所述第一车端根据所述第一路径进行行驶;
43、第二发送模块,所述第二发送模块用于向所述第二子路径对应的第二车端发送第二控制命令,以使所述第二车端根据更新时间戳后的第二子路径进行行驶。
44、在一种可能的实现方式中,所述仲裁模块用于当至少两个所述子路径相交时,根据仲裁算法确定第一子路径和第二子路径具体包括:
45、根据两个车端的车牌号确定第一子路径和第二子路径;和/或,
46、根据两个车端中会员优先原则确定第一子路径和第二子路径;或者,
47、根据两个车端的剩余能量确定第一子路径和第二子路径。
48、在一种可能的实现方式中,每个路点还包括行驶速度和方向,所述更新模块对所述第二子路径上的路点的时间戳进行更新具体包括:
49、根据所述第一子路径的路点的时间戳、行驶速度和行驶方向,计算车辆驶离第一子路径的时长;
50、根据所述时长,更新所述第二子路径上的每个路点的时间戳。
51、在一种可能的实现方式中,所述更新模块根据所述时长,更新所述第二子路径上的每个路点的时间戳具体包括:
52、将所述时长和所述第二子路径上每个路点的时间戳进行叠加,以更新所述第二子路径的路点的时间戳。
53、在一种可能的实现方式中,所述确定模块根据所述车端位置和所述桩位位置,确定车端的行驶路径具体包括:
54、根据所述车端位置、所述桩位位置、场端的地图和实时的环境感知信息,确定每个车端的行驶路径;其中,所述实时的环境感知信息是根据接收到的场端的多种传感器的数据进行融合所得到的。
55、在一种可能的实现方式中,所述第一获取模块获取每个车端的车端位置具体包括:
56、当车端进入场端时,获取车端上的标签与场端的至少三个基站进行通信时的第一信号、第二信号和第三信号;
57、根据所述第一信号、第二信号和第三信号,以及所述基站在场端坐标系中的位置,确定车辆在场端坐标系中的第一位置;和/或,
58、当车辆上的gps信号的信号强度符合要求时,获取地球坐标系的所述gps信号;
59、将所述gps信号转换为场端坐标系中的第二位置;
60、根据所述第一位置和所述第二位置,确定车端的位置。
61、在一种可能的实现方式中,所述第一获取模块根据所述第一信号、第二信号和第三信号,以及所述基站在场端坐标系中的位置,确定车辆在场端坐标系中的第一位置具体包括:
62、根据所述第一信号,确定所述基站中的第一基站与所述标签的第一距离;
63、根据所述第二信号,确定所述基站中的第二基站与所述标签的第二距离;
64、根据所述第三信号,确定所述基站中的第三基站与所述标签的第三距离;
65、根据所述第一距离、所述第二距离和所述第三距离,以及所述第一基站的位置、第二基站的位置和第三基站的位置,通过三角定位方法确定所述标签在所述场端坐标系的第一位置。
66、在一种可能的实现方式中,当所述车端进入所述场端时,所述场端的基站与所述车端的标签建立uwb通信链接;
67、当所述车端进入所述场端时,所述场端的控制器与所述车端的控制器建立无线通信链接。
68、本发明实施例第三方面提供了一种场端调度系统,所述系统包括第一方面的场端调度装置。
69、本发明实施例第四方面提供了一种场端调度部件,所述部件包括:至少一个处理器;以及与所述至少一个处理器通信连接的存储器;其中,所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行如本发明实施例第一方面中任一项所述的场端调度方法。
70、通过应用本发明实施例提供的场端调度方法,场端可以根据车辆位置、桩位位置和场端地图,为车辆进行路径规划,并且将行驶路径划分为多个子路径,对多个子路径进行仲裁,以保证车辆有序行驶,在每个子路径上都不会相撞,从而保证了场端内的车辆的有序行驶。
- 还没有人留言评论。精彩留言会获得点赞!