一种基于轮迹影响线的移动车辆轮重识别方法及系统与流程
本发明涉及桥梁健康监测,特别涉及一种基于轮迹影响线的移动车辆轮重识别方法及系统。
背景技术:
1、桥梁动态称重(bridge weigh-in-motion,bwim)系统可在不中断交通的情况下从桥梁响应中估计出移动车辆的重量。桥梁动态称重系统的传感器安装在桥下,避免了承受巨大的车轮荷载从而提高了系统的耐用性。此外,桥梁动态称重系统安装简便且无需中断交通。最重要的是,相比于路面动态称重系统,桥梁动态称重系统理论上可以提供更加精确的轴重估计值。这些优点使得桥梁动态称重系统成为桥梁健康监测、超载车辆识别、交通荷载信息调查的理想工具。
2、然而,现有的桥梁动态称重技术,一方面,待测车辆的同轴左、右轮载被简化为轴中心线处的集中力,从而无法考虑轮距大小和车辆偏载带来的影响。另一方面,局限于车辆的轴重、总重识别,尚无法直接对车辆轮重进行识别。
技术实现思路
1、为了解决现有技术中存在的问题,本技术实施例提供一种基于轮迹影响线的移动车辆轮重识别方法及系统,采用左、右轮迹处的桥梁影响线对车辆轮重进行计算,从而提高现有的桥梁动态称重精度。
2、一种基于轮迹影响线的移动车辆轮重识别方法,包括:
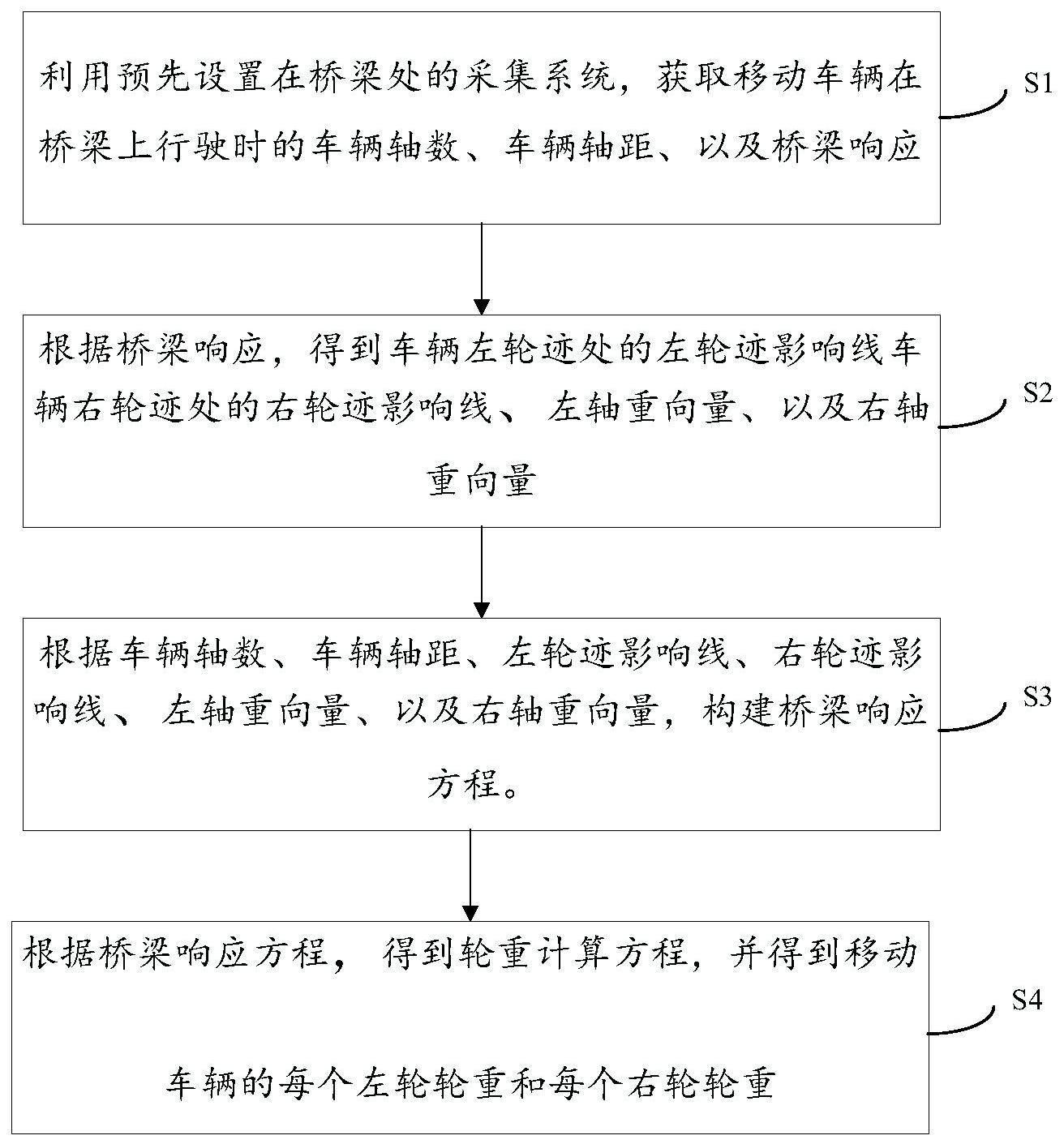
3、利用预先设置在桥梁处的采集系统,获取移动车辆在桥梁上行驶时的车辆轴数n、车辆轴距d、以及桥梁响应εm;
4、根据桥梁响应εm,得到车辆左轮迹处的左轮迹影响线il、车辆右轮迹处的右轮迹影响线ir、左轴重向量pl、以及右轴重向量pr;
5、根据车辆轴数n、车辆轴距d、左轮迹影响线il、右轮迹影响线ir、左轴重向量pl、以及右轴重向量pr,构建桥梁响应方程εt;
6、根据桥梁响应方程εt,得到轮重计算方程plr;根据轮重计算方程,得到移动车辆的每个左轮轮重和每个右轮轮重
7、一些实施例中,所述桥梁响应εm包括正应变、剪应变、挠度、以及支座反力;
8、所述采集系统包括桥梁动态称重系统;利用桥梁动态称重系统中设置在不同桥梁位置处的称重传感器采集到的桥梁响应εm不同。
9、一些实施例中,所述桥梁响应方程εt采用下述公式计算得到:
10、
11、其中,
12、εt表示t时刻的桥梁响应;
13、λl表示由所有左轮迹影响线il对应的左影响线系数构成的矩阵;
14、λr表示由所有右轮迹影响线ir对应的右影响线系数构成的矩阵;
15、pl表示移动车辆的左轴重向量;
16、pr表示移动车辆的右轴重向量;
17、t表示矩阵置。
18、一些实施例中,所述轮重计算方程plr采用下述公式计算得到:
19、plr=(λλt)-1λεm
20、其中,
21、plr表示移动车辆所有左轮轮重和所有右轮轮重构成的矩阵;
22、t表示矩阵置;
23、εm表示桥梁响应;
24、m表示总采样数。
25、一些实施例中,所述左轮迹影响线il采用下述公式计算得到:
26、
27、其中,
28、il表示左轮迹影响线;
29、l表示移动车辆的左轮;
30、m表示总采样数;
31、n表示车辆轴数;
32、c表示车轴采样间隔;
33、所述右轮迹影响线ir采用下述公式计算得到:
34、
35、其中,
36、ir表示左轮迹影响线;
37、r表示移动车辆的右轮。
38、一些实施例中,所述车轴采样间隔采用下述公式计算得到:
39、
40、其中,
41、i表示移动车辆的车轴;
42、ci表示第i个车抽和第1个车轴到达同一位置相隔的时间采样点数;
43、di表示第i个车抽和第1个车轴的间距;
44、f表示采样频率;
45、v表示移动车辆的车速。
46、一些实施例中,所述左影响线系数矩阵λl采用下述公式计算得到:
47、
48、其中,
49、λl(i,j)表示左影响线系数;
50、i表示移动车辆的车轴;
51、j表示采样时间点;
52、m表示总采样数;
53、il表示左轮迹影响线;
54、所述右影响线系数矩阵λr采用下述公式计算得到:
55、
56、其中,
57、λr(i,j)表示右影响线系数;
58、ir表示右轮迹影响线。
59、一些实施例中,所述左轴重向量pl采用下述公式计算得到:
60、
61、其中,
62、pl表示左轴重向量;
63、l表示移动车辆的左轮;
64、n表示车辆轴数;
65、所述右轴重向量pr采用下述公式计算得到:
66、
67、其中,
68、pr表示右轴重向量;
69、r表示移动车辆的左轮。
70、一些实施例中,所述方法还包括:
71、根据移动车辆的每个左轮轮重和每个右轮轮重得到车轴轴重和车辆总重;
72、所述车轴轴重采用下述公式计算得到:
73、p=pl+pr
74、其中,
75、p表示车轴轴重;
76、pl表示车轴左侧的左轮轮重;
77、pr表示车轴右侧的右轮轮重;
78、所述车辆总重采用下述公式计算得到:
79、gross=‖p‖1
80、其中,
81、gross表示车辆总重。
82、一种基于轮迹影响线的移动车辆轮重识别系统,包括:
83、采集系统,其预先设置在桥梁处,用于获取移动车辆在桥梁上行驶时的车辆轴数n、车辆轴距d、以及桥梁响应εm;
84、处理模块,其用于根据桥梁响应εm,得到车辆左轮迹处的左轮迹影响线il、车辆右轮迹处的右轮迹影响线ir、左轴重向量pl、以及右轴重向量pr;还用于根据车辆轴数n、车辆轴距d、左轮迹影响线il、右轮迹影响线ir、左轴重向量pl、以及右轴重向量pr,构建桥梁响应方程εt;根据桥梁响应方程εt,得到轮重计算方程plr;还用于根据轮重计算方程,得到移动车辆的每个左轮轮重和每个右轮轮重
85、本技术提供的技术方案带来的有益效果包括:
86、对于过桥的移动车辆,采用其左、右轮迹处的桥梁影响线,可以高精度识别车辆的轮重,在轮重识别的基础上,将现有的桥梁动态称重应用扩展至偏载车辆测量领域,与超载车辆监控相结合,为形成完善的行车安全监测系统服务。
87、采用其左、右轮迹处的桥梁影响线还可以在轮重计算的基础上,对车轴轴重和车辆总重进行计算,这样不仅可以考虑车辆轮距大小、车辆偏载带来的影响,还可以精确考虑车辆横向位置,从而提高现有的桥梁动态称重精度,为相关部门提供精确的交通荷载数据提供支持。
- 还没有人留言评论。精彩留言会获得点赞!