一种基于多源影像的时序指数数据融合方法及装置与流程
本发明涉及遥感数据融合,尤其涉及一种基于多源影像的时序指数数据融合方法及装置。
背景技术:
1、遥感指数数据在影像识别、遥感监测中提供了非常重要的作用,植被指数、水体指数等能够简单有效的反应与地物的关系。目前应用广泛的高时间分辨率modis影像、中空间分辨率landsat影像和高空间分辨率sentinel2影像等都受到了地面气象因素的影响,使得遥感监测不能满足连续动态跟踪监测的要求。为满足地表信息遥感动态监测同时对具有高空间分辨率和高时间分辨率特征遥感数据的需求,一些学者提出了一种能够综合高空间分辨率遥感数据的空间分辨率特征和高时间分辨率遥感数据的时间分辨率特征的技术,即遥感数据时空融合技术。
2、而在现有技术,通常存在以下至少一个问题:例如数据连续缺失的地区存在重建质量较低;空间分辨率相差过大的情况下,数据融合效果不理想;支持的数据类型太过单一,无法保证除植被指数外其他类型的数据需要;或是无法最大程度的保证数据对真实情况的体现。
技术实现思路
1、本发明要解决的技术问题是,如何缓解现有技术中,无法实现长时序、高频率、高精度遥感监测的技术问题。有鉴于此,本发明提供一种基于多源影像的时序指数数据融合方法及装置。
2、本发明采用的技术方案是,所述基于多源影像的时序指数数据融合方法,其特征在于,包括:
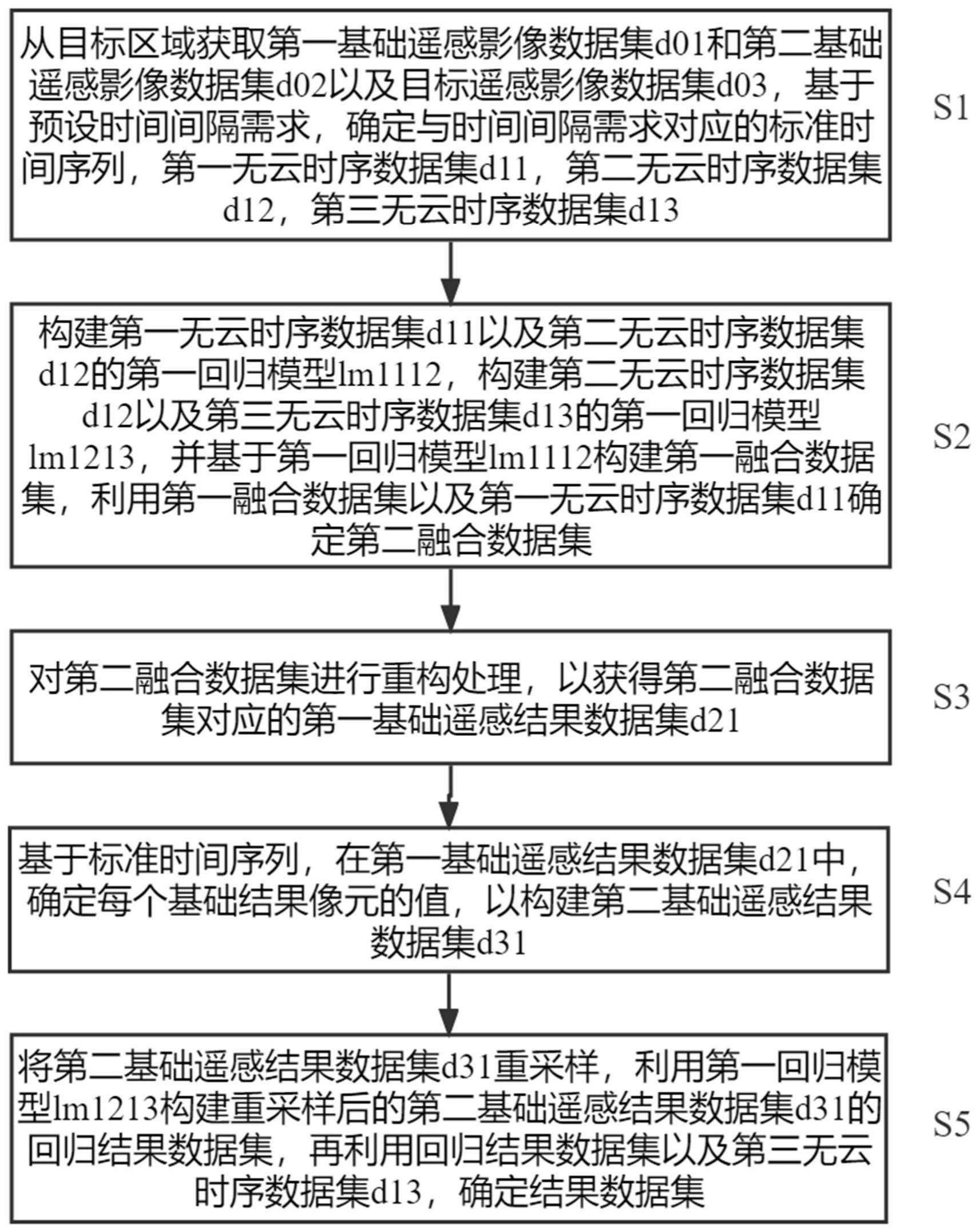
3、步骤s1,从目标区域获取第一基础遥感影像数据集和第二基础遥感影像数据集以及目标遥感影像数据集,基于预设时间间隔需求,确定与所述时间间隔需求对应的标准时间序列,第一无云时序数据集,第二无云时序数据集,第三无云时序数据集;
4、步骤s2,构建所述第一无云时序数据集以及所述第二无云时序数据集的第一回归模型,构建所述第二无云时序数据集以及所述第三无云时序数据集的第二回归模型,并基于所述第一回归模型构建第一融合数据集,利用所述第一融合数据集以及所述第一无云时序数据集确定第二融合数据集;
5、步骤s3,对所述第二融合数据集进行重构处理,以获得所述第二融合数据集对应的第一基础遥感结果数据集;
6、步骤s4,基于所述标准时间序列,在所述第一基础遥感结果数据集中,确定每个基础结果像元的值,以构建第二基础遥感结果数据集;
7、步骤s5,将所述第二基础遥感结果数据集重采样,利用所述第二回归模型构建重采样后的第二基础遥感结果数据集的回归结果数据集,再利用所述回归结果数据集以及所述第三无云时序数据集,确定结果数据集。
8、在一个实施方式中,所述步骤s1包括:
9、步骤s101,基于预设天数的时间间隔需求,构建每年的按照所述时间间隔为一期的标准时间序列,其中,若年终天数不满所述时间间隔时,向后补足直至达到所述时间间隔;
10、步骤s102,利用所述第一基础遥感影像数据集,基于云掩码去云构建modis逐日ndvi数据集按照所述时间间隔合成的中间数据集,再将中间数据集合成为第一无云时序数据集;
11、步骤s103,利用所述第二基础遥感影像数据集,基于fmask构建landsat8、landsat9数据的按照所述时间间隔合成的中间数据集,再将中间数据集合成为第二无云时序数据集;
12、步骤s104,利用所述目标遥感影像数据集,基于s2cloudless构建sentinel2数据的按照所述时间间隔合成的中间数据集,再将中间数据集合成为第三无云时序数据集。
13、在一个实施方式中,所述步骤s2包括:
14、步骤s201,利用至少一次双立方卷积插值,将所述第一无云时序数据集重采样为与所述第二无云时序数据集分辨率一致的第一融合数据集,基于所述第一时序数据集与所述第二无云时序数据集构建第一回归模型;
15、步骤s202,基于所述第一回归模型重建所述第一无云时序数据集,并与所述第二无云时序数据集进行mosaic镶嵌融合以生成第二融合数据集;
16、步骤s203,基于所述第二无云时序数据集与所述第三无云时序数据集构建第二回归模型。
17、在一个实施方式中,所述步骤s3包括:
18、步骤s301,将所述第二融合数据集使用线性插值构建较完整的插值数据集;
19、步骤s302,利用所述插值数据集,基于加权sg滤波算法重建完整的ndvi时间序列,以得到完整的第一基础遥感结果数据集。
20、在一个实施方式中,所述步骤s4包括:
21、步骤s401,基于所述标准时间序列,在所述第一基础遥感结果数据集中,以每个时序点为基准寻找对应的modis和landsat的ndvi影像对,通过设定窗口大小获取modis像元所对应的landsat相似像元集,计算modis像元与landsat像元的距离权重,通过距离权重加权求和得到基础结果像元的值;
22、步骤s402,若未找到相似像元的基础像元,利用邻近像素的平均参考序列,求得基础结果像元的值,以构建第二基础遥感结果数据集。
23、在一个实施方式中,所述步骤s5包括:
24、步骤s501,利用至少一次双立方卷积插值,将所述第二基础遥感结果数据集重采样为与sentinel2数据分辨率一致的时序ndvi数据集,基于第二回归模型构建所述第二基础遥感结果数据集的回归结果数据集;
25、步骤s502,基于所述第三无云时序数据集与所述回归结果数据集融合镶嵌生成最终的结果数据集。
26、本发明的另一方面还提供了一种基于多源影像的时序指数数据融合装置,包括:
27、多源数据重建模块,被配置为:从目标区域获取第一基础遥感影像数据集和第二基础遥感影像数据集以及目标遥感影像数据集,基于预设时间间隔需求,确定与所述时间间隔需求对应的标准时间序列,第一无云时序数据集,第二无云时序数据集,第三无云时序数据集;
28、数据集填充模块,被配置为:构建所述第一无云时序数据集以及所述第二无云时序数据集的第一回归模型,构建所述第二无云时序数据集以及所述第三无云时序数据集的第二回归模型,并基于所述第一回归模型构建第一融合数据集,利用所述第一融合数据集以及所述第一无云时序数据集确定第二融合数据集;
29、重构模块,被配置为:对所述第二融合数据集进行重构处理,以获得所述第二融合数据集对应的第一基础遥感结果数据集;
30、融合计算模块,被配置为:基于所述标准时间序列,在所述第一基础遥感结果数据集中,确定每个基础结果像元的值,以构建第二基础遥感结果数据集;
31、确定模块,被配置为:将所述第二基础遥感结果数据集重采样,利用所述第二回归模型构建重采样后的第二基础遥感结果数据集的回归结果数据集,再利用所述回归结果数据集以及所述第三无云时序数据集,确定结果数据集。
32、本发明的另一方面还提供了一种电子设备,所述电子设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述计算机程序被所述处理器执行时实现如上任一项所述的基于多源影像的时序指数数据融合方法的步骤。
33、本发明的另一方面还提供了一种计算机存储介质,所述计算机存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如上任一项所述的基于多源影像的时序指数数据融合方法的步骤。
34、采用上述技术方案,本发明所述基于多源影像的时序指数数据融合方法至少具有下列优点:
35、1)本发明提供的方法是选择基于自定义需求构建标准的时间序列,并且依照时间序列来分别构建时序数据集,考虑了时间间隔的情况,采用计算时间上的权重来重新构建时间间隔内具有代表性的数据,满足了自定义时间分辨率的需要,同时也减少了后续时间对照的差异性;
36、2)本发明所提供的方法可以选择使用三种不同的遥感数据集来做融合,基于高时间分辨率的数据做时序上的插值,基于中分辨率的数据作为中间数据集,使用高空间分辨率的数据集做目标数据集,减少了从低到高因为差距过大导致的融合不确定性问题,同时利用中分辨率数据做补值,增加了数据准确性,提高了数据的真实性。
37、3)本发明在处理不同传感器所造成的数值差异的问题上,引用回归模型的处理方式,构建两两数据集之间的模型,在数据融合之前先进行数据的一致性处理,增加了融合对照的一致性,保证了融合结果数据的准确性。
- 还没有人留言评论。精彩留言会获得点赞!