一种面向耕地信息提取的地学分区方法
本发明属于数字图像处理,特别涉及一种面向耕地遥感信息提取的地学分区方法。
背景技术:
1、粮食安全是人类可持续发展的主要挑战。遥感信息作为农业测绘和监测的重要数据来源,已有大量研究基于遥感开展了耕地和作物的信息提取,主要包括作物分布、作物类型和种植频率等信息,这些研究都证实了遥感技术应用于耕地信息提取的可行性和应用前景。随着影像分辨率的提升,耕地在影像中呈现的视觉特征也逐渐细化。耕地随着地理环境的不同,具有不同的表现形式,比如在地势平坦地区的耕地大多表现为有规则边界的方形或长方形地块,在山地与平原交界处的耕地大多伴有种植纹理但没有规则边界,在地势起伏相对较大的山地区域耕地大多表现为具有空间上下结构的带状。虽然相较于地势平缓地区的耕地而言,位于山坡处的耕地分布面积并不算大,但是他们却发挥着重要的作用。比如梯田是为了将山区或陡坡转化为可耕地而建造的,许多研究已证实梯田作为土地和水的综合系统的重要性。另外坡耕地作为山丘区耕地的重要组成部分,由于耕作粗放,抵御干旱与洪涝等自然灾害能力不强,坡耕地整治对于减少水土流失、合理规划利用坡耕地资源、补偿工业和城镇化发展占用耕地等方面都具有重要意义。因此掌握不同形态耕地的空间分布对于耕地生态环境治理和保障国家粮食安全具有重大意义(参见fritz s,see l,mccallumi,et al.mapping global cropland and field size[j].global change biology,2015,21(5):1980-1992.)。
2、当前关于遥感耕地信息提取的研究大多集中于耕地、非耕地的识别,或者具体作物类型的识别,比如玉米、大豆等,针对不同视觉特征的耕地提取研究相对较少。不同形态的耕地在提取方面主要有以下两个难点:一是虽然我们认知中耕地形态不同,但在遥感影像上由于“同物异谱”或者“异物同谱”的问题表现出的影像特征并不能被准确的区分,虽然多有借助作物时序生长特征的方式辅助识别(参见cao b,yu l,naipal v,et al.a30mterrace mapping in china using landsat 8imagery and digital elevation modelbased on the google earth engine[j].earth system science data,2021(5).),但对于不同形态耕地,其内部种植的作物混杂,上述方式仍然很难实现提取;二是其针对山地区域的耕地而言,耕地周围多伴有林地,种植环境相对复杂。若要实现精细提取,需要借助高分辨率的遥感影像(参见zhang d,pan y,zhang j,et al.a generalized approach basedon convolutional neural networks for large area cropland mapping at very highresolution[j].remote sensing ofenvironment,2020,247:111912.)。但高分影像难获取且时间分辨率较低,当获取的影像时间正好处于秋冬季时,该类耕地在影像上的光谱特征与周围的林地等相似,很难识别。
3、随着解译需求的提升,单纯依靠影像特征已无法满足精度的要求,而地学知识作为能够反映地表要素环境或分布情况的直接数据被越来越多地作为辅助数据应用于遥感智能解译过程中。地学分区作为地理研究的一个重要手段,通过归纳总结温度、水分、土壤、生物等要素的地域分异规律,反映相应地理区域内部的均质性和区域之间的异质性,是识别区域地理特征与差异的重要途径(参见中国科学院地理研究所.中国综合自然区划[m].科学出版社,1959.),自19世纪发展至今已经积累了众多数据。将地理分区应用于遥感解译是一种系统融入地学知识的有效手段(参见张兵,杨晓梅,高连如,孟瑜,孙显,肖晨超,倪丽.遥感大数据智能解译的地理学认知模型与方法[j].测绘学报,2022,51(07):1398-1415.)。当前应用于遥感智能解译中的地学分区方法主要如下:1)直接使用已有的生态分区、行政区划、路网等数据,2)基于专家知识的经验判断人工生成区划方案,3)基于某一种数据(如高程数据)的阈值分割。以上方法在解译过程中的应用有以下不足:1)大多数已有的区划数据大多针对于大尺度的制图情景,可能与当下解译目标的研究尺度不匹配;2)依据专家知识的划分方法依赖经验且客观性不足;3)单一数据大多只能反映一个地学要素的空间分异规律,且阈值划分大多表现为刚性的规则,忽略了多要素相互组合产生的模糊知识,进而可能不符合实际地表分布规律(参见刘巍,吴志峰,骆剑承,孙营伟,吴田军,周楠,胡晓东,王玲玉,周忠发.深度学习支持下的丘陵山区耕地高分辨率遥感信息分区分层提取方法[j].测绘学报,2021,50(01):105-116.)。当前虽然已有较多的地学分区数据积累,但是面向遥感解译需求的地学分区方法研究仍然不足。
技术实现思路
1、针对上述问题,为了克服传统提取方法中存在的不足,本发明提出了一种面向耕地信息提取的地学分区方法,该方法综合利用地学分区的思想,结合多源数据,将地学知识融入到遥感解译过程中,通过分区的方法划定不同形态耕地的集中分布区域,基于分区的结果进一步实现不同耕地类型的高精度自动提取。
2、本发明的具体技术方案是一种面向耕地信息提取的地学分区方法,其特征在于,包括以下步骤:
3、1)得到进行耕地信息提取的区域的遥感影像数据和辅助数据,数据包括高分辨率遥感影像、月平均ndvi数据集、建筑物专题数据和dem数据,并建立耕地类型解译标志和分类体系,分类体系为一级类包含耕地与非耕地,耕地二级类进一步包含规则耕地、大棚、坡耕地和梯田;
4、2)对进行耕地信息提取的区域的高分辨率遥感影像进行影像多尺度分割,在进行耕地信息提取的区域内建立规则的蜂窝格网,在格网内部进行空间均匀分布的样本采集,得到各耕地类型与非耕地的样本;
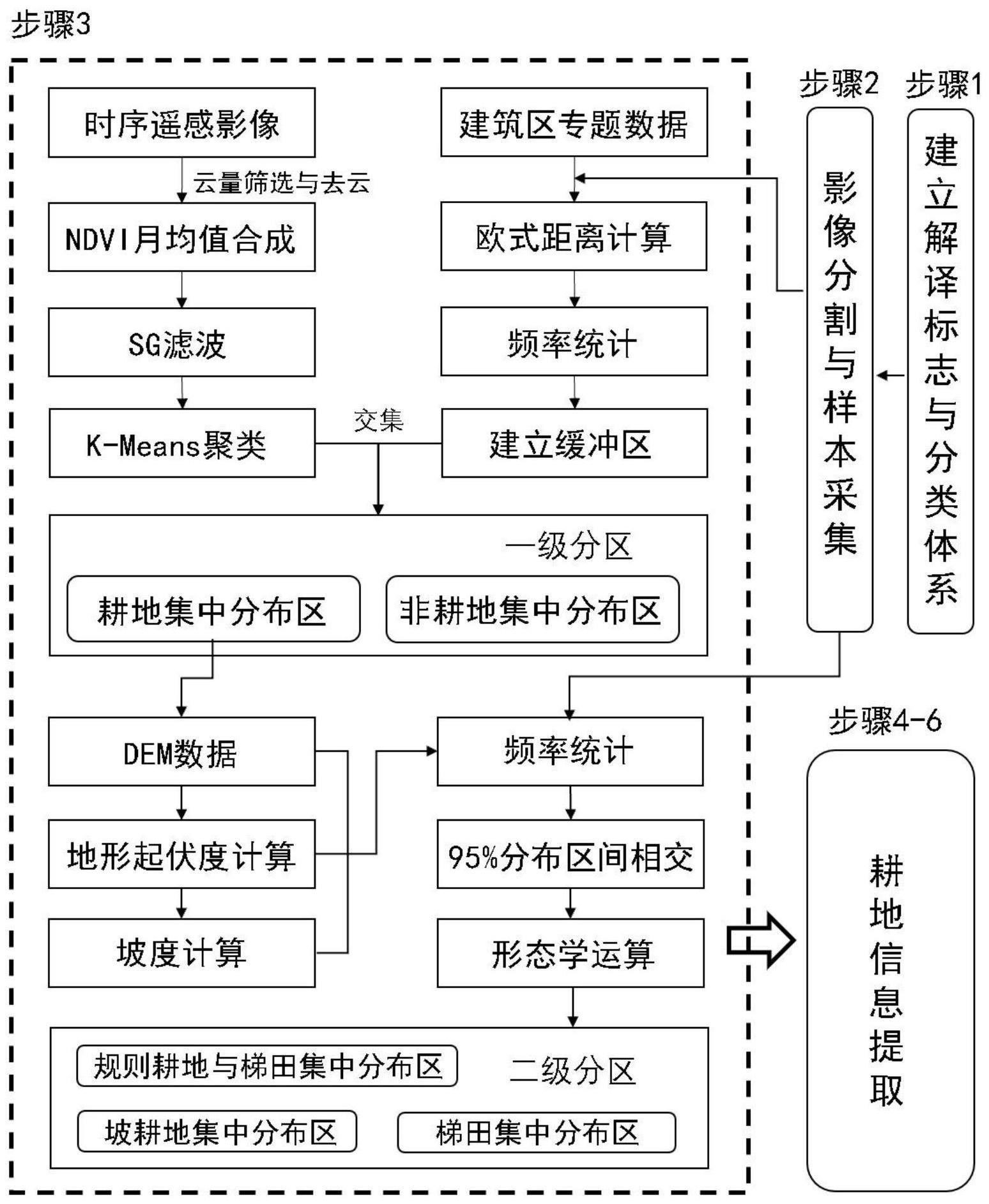
5、3)利用月平均ndvi数据和建筑物专题数据进行一级分区,首先根据月平均ndvi数据集得到ndvi时间序列数据并进行聚类,得到聚类后的耕地集中分布的区域和非耕地集中分布的区域,根据建筑物专题数据,计算每个耕地样本与建筑物之间的欧氏距离,设定百分比阈值a,统计样本总数乘以a数量的耕地样本与建筑物之间欧式距离的最大值,得到距离阈值b,并认为距离建筑物欧氏距离b范围以内的区域为耕地集中分布的区域,距离建筑物欧氏距离b范围以外的区域为非耕地集中分布的区域,得到基于建筑物距离的耕地集中分布的区域和非耕地集中分布的区域,将聚类后的耕地集中分布的区域和非耕地集中分布的区域与基于建筑物距离的耕地集中分布的区域和非耕地集中分布的区域进行空间叠置,得到的耕地区域的交集为一级分区结果中实际耕地集中分布的区域,其他区域为一级分区结果中非耕地集中分布的区域,下一步根据不同耕地类型在地形上的分布特点,结合dem数据,将实际耕地集中分布的区域进一步划分为初始规则耕地与大棚、梯田、坡耕地的集中分布区域,进一步对初始区域中的细小空洞进行填补并去除碎屑斑块,再对各耕地类型集中分布的区域进行叠加,对相交区域采用耕地样本对其耕地类型属性进行判断,最终得到二级分区结果,即实际规则耕地与大棚、梯田、坡耕地的集中分布区域;
6、4)基于二级分区结果将进行耕地信息提取的区域的高分辨率遥感影像划分为分别集中分布着非耕地、规则耕地与大棚、梯田、坡耕地的4个子区域,并在每个子区域内分别进行影像多尺度分割;
7、5)将步骤2中所获样本进行对象到点到对象的样本转换,具体通过将步骤2的样本中心生成一个点,再寻找该点落入的步骤4)中产生的分割对象,并将该分割对象发展为与该点属性一致的对象样本;
8、6)在每个子区域内,利用步骤5生成的落入该子区域的样本和随机森林算法分别训练分类模型,实现地学分区支持下的耕地信息提取。
9、更进一步地,所述的步骤3)的具体过程是:
10、3.1)构建长时间序列的无云遥感影像数据集,即月平均ndvi数据集,基于该数据集进行ndvi的计算,并对计算结果进行中值月合成,得到ndvi时间序列数据,计算公式按下式(i):
11、
12、其中,nir为当前影像的近红外波段,red为当前影像的红波段;
13、3.2)对步骤3.1中的ndvi时间序列数据进行sg滤波,实现噪声去除和数据平滑;
14、3.3)对平滑后的ndvi时间序列数据进行k-means聚类,聚类簇数设置为2,目的是通过聚类的手段实现耕地与非耕地二者集中分布区域的划分,得到聚类后的耕地集中分布的区域和非耕地集中分布的区域;
15、3.4)根据建筑区专题数据,计算耕地样本与建筑物之间的欧氏距离,所述的百分比阈值a等于95%和距离阈值b等于0.016°,统计样本总数乘以a数量的耕地样本与建筑物之间欧式距离的最大值,得到距离阈值b,并认为距离建筑物欧氏距离b范围以内的区域为耕地集中分布的区域,距离建筑物欧氏距离b范围以外的区域为非耕地集中分布的区域,得到基于建筑物距离的耕地集中分布的区域和非耕地集中分布的区域;
16、3.5)将聚类后的耕地集中分布的区域和非耕地集中分布的区域与频率统计后的耕地集中分布的区域和非耕地集中分布的区域进行空间叠置,得到的耕地区域的交集为一级分区结果,即实际耕地集中分布的区域和非耕地集中分布的区域;
17、3.6)基于dem数据计算坡度和地形起伏度进而获得进行耕地信息提取的区域内的海拔dem、坡度slope和地形起伏度relief数据,然后统计规则耕地、大棚、梯田与坡耕地不同类型耕地样本分别在海拔、坡度和地形起伏度上的分布范围,并取3种地形因子落入样本数量95%的分布范围的交集作为各耕地类型的集中分布区域;其中规则耕地的分布区域为同时满足海拔低于600米、地形起伏度小于7米且坡度小于7度的区域,表示为{(dem<600m)&(relief<7m)&(slope<7°)},坡耕地的分布区域为{(dem<900m)&(relief<14m)&(slope<21°)},梯田的分布区域为{(600m≤dem<900m)&(relief<21m)&(slope<21°)},大棚的分布区为{(dem<600m)&(relief<7m)&(slope<7°)},与规则耕地的分布区一致,将实际耕地集中分布的区域进一步划分为初始规则耕地与大棚、梯田、坡耕地的集中分布区域;
18、3.7)对3.6)中获得的将实际耕地集中分布的区域进一步划分为初始规则耕地与大棚、梯田、坡耕地的集中分布区域进行形态学的开运算和闭运算处理,填补区域中的细小空洞和去除碎屑斑块;
19、3.8)将步骤3.7得到各耕地类型集中分布的区域进行叠加,由于边界相交将产生一些同时属于两种或以上耕地类型的斑块,此时借助样本对其耕地类型属性进行判断,将落入斑块内的样本数量最多的对应耕地类型属性赋予该斑块,并将属性相同的斑块进行合并,最终得到二级分区结果,即实际规则耕地与大棚、梯田、坡耕地的集中分布区域。
20、本发明的有益效果是:1)本发明将地学分区的经典地理思想融入到遥感解译过程中,结合多源数据,提出了一种面向耕地信息提取的分区方法,将地学知识和地物空间关系充分应用到遥感解译过程中,弥补单纯依靠遥感影像光谱特征提取方法的不足;2)根据耕地与非耕地的光谱时序特性和空间分布特征先进行了一级分区,根据不同耕地类型的地形分布特征进一步开展了二级分区,通过探究不同类型耕地的空间分异规律提出了一种多层级影像分区的方法,进一步用于指导耕地信息的提取。通过划分不同类型耕地的集中分布区域,进一步在各子区域内分别训练分类模型,能够减弱其他地物类型光谱信息的干扰,有效解决同物异谱和异物同谱带来的错分类问题;3)通过地学分区实现各形态耕地类型集中分布的子区域划分,进一步分别为各子区域计算最优分割尺度,以此更精准的实现不同类型耕地的对象边界表达。
21、本发明的方法综合利用了时序数据、建筑专题数据、地形数据等多源数据,将地学分区思想和地学知识融入到遥感智能解译中来,通过分区的方式,将不同类型耕地的集中分布区域进一步划分,很大程度上避免了同物异谱或者异物同谱问题带来的错分类,同时实现了各耕地类型对象边界更精准的表达,具有显著性优势,在大区域高精度自动提取耕地信息方面具有重大潜力。
- 还没有人留言评论。精彩留言会获得点赞!