一种旋转不变的多光谱图像的描述子匹配方法
本发明涉及图像处理,尤其涉及一种旋转不变的多光谱图像的描述子匹配方法。
背景技术:
1、特征点匹配是计算机视觉和图像处理领域的一个重要研究问题,广泛应用于图像检索、3d重建、定位以及slam(simultaneous location and mapping,即时定位与地图构建)等任务中。手工特征匹配主要分为三步:特征点提取、计算主方向和提取描述子。利用特征点邻域区域建立与特征点相关联的描述子是特征点匹配的关键问题。基于人工设计的特征,一般采用梯度及其变种形式,例如sift(scale-invariant feature transform,尺度不变特征变换)、surf(speed up robust features,加速稳健特征)、orb(oriented fast androtated brief,快速特征提取和描述)等。然而,对于多光谱图像而言,基于梯度的方法对于多光谱图像中的非线性辐射扭曲(nonlinear radiation distortion,nrd)的特征效果不佳。近年来,使用相位信息进行图像的特征提取方法逐渐得到应用。
2、然而,现有的多光谱图像匹配方法在针对旋转的多光谱特征匹配上效果表现不佳,现有方法使用梯度信息计算图像块的主方向,其效果在多光谱图像上并不能准确找到图像旋转信息从而进行特征点匹配。
3、现有技术中的一种多光谱图像特征匹配方法,例如,rift(radiation-variationinsensitive feature transform,辐射变化不敏感特征变换)方法利用相位一致性提取图像的mim(max index map,最大索引层)层,并使用主方向计算对应特征点的主方向,构建矩形描述子进行特征匹配。hopc(histogramof oriented phase congruency,方向相位一致性直方图)使用相位一致性以及相关的旋转信息进行图像特征提取与匹配。上述相位一致性指取图像傅里叶变换后分量最大相位。
4、上述现有技术中的一种多光谱图像特征匹配方法的缺点包括:
5、需要图像的相关信息,该方法在进行图像特征提取前,需要知道图像的几何信息等先验信息,然而在实践中,尤其是卫星图像匹配中,先验信息具有不确定性,对此类信息的以来可能会造成匹配的误差。
6、对于旋转图像的匹配效果不佳,该方法在提取特征点后,利用梯度信息计算特征点描述子,而梯度信息在多光谱图像上并不稳定,其主方向计算并不准确。
7、该方法对特定旋转角度图像处理不佳,如果图像旋转角度位log-gabor滤波器方向的中间值,如相邻log-gabor滤波器的方向分别为0°和30°,则对于15°附近的旋转角度处理不佳。
技术实现思路
1、本发明的实施例提供了一种旋转不变的多光谱图像的描述子匹配方法,以实现有效进行多光谱图像的匹配处理。
2、为了实现上述目的,本发明采取了如下技术方案。
3、一种旋转不变的多光谱图像的描述子匹配方法,包括:
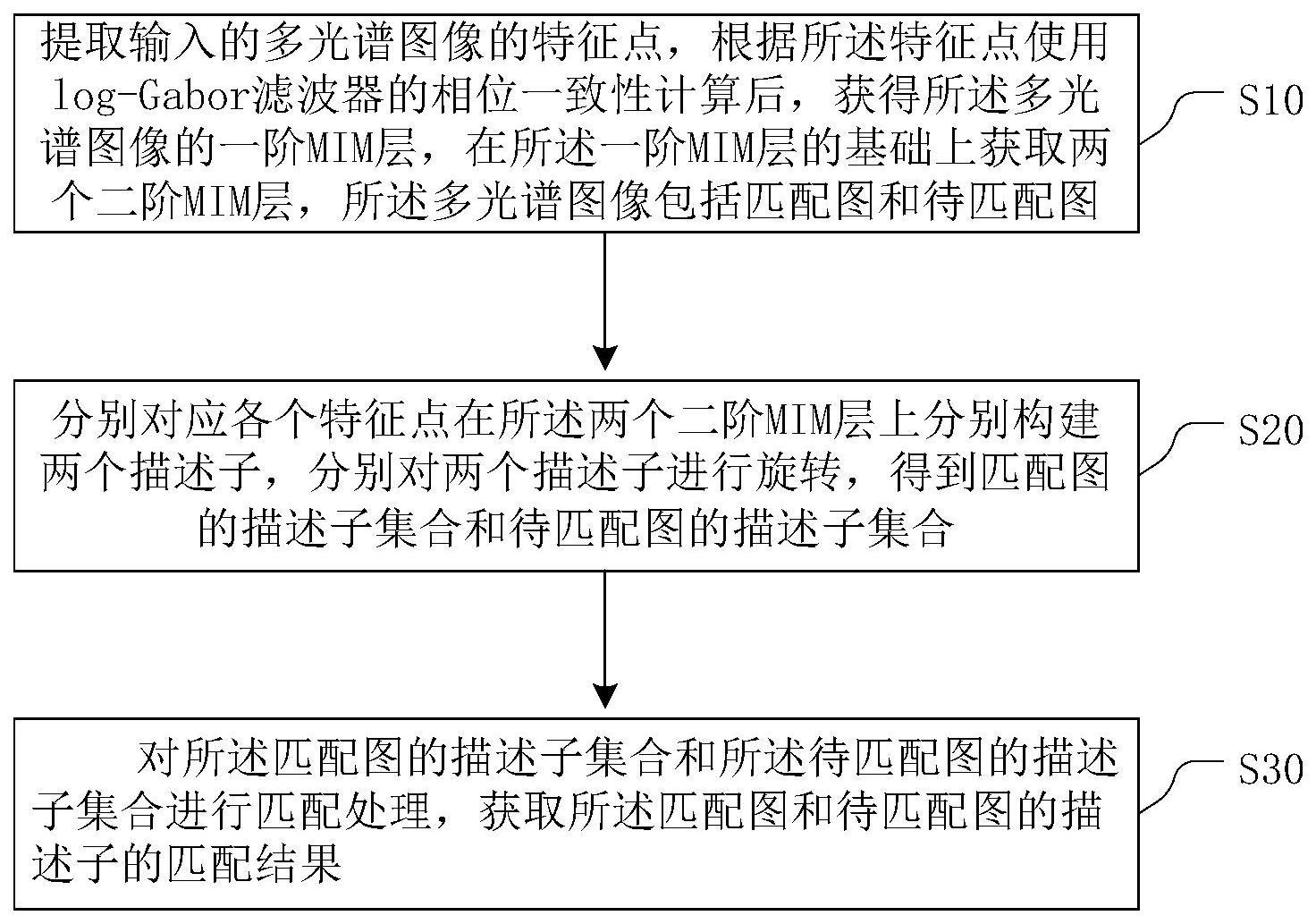
4、提取输入的多光谱图像的特征点,根据所述特征点使用log-gabor滤波器的相位一致性计算后,获得所述多光谱图像的一阶mim层,在所述一阶mim层的基础上获取两个二阶mim层,所述多光谱图像包括匹配图和待匹配图;分别对应各个特征点在所述两个二阶mim层上分别构建两个描述子,分别对两个描述子进行旋转,得到匹配图的描述子集合和待匹配图的描述子集合;
5、对所述匹配图的描述子集合和所述待匹配图的描述子集合进行匹配处理,获取所述匹配图和待匹配图的描述子的匹配结果。
6、优选地,所述的提取输入的多光谱图像的特征点,根据所述特征点使用log-gabor滤波器的相位一致性计算后,获得所述多光谱图像的一阶mim层,在所述一阶mim层的基础上获取两个二阶mim层,所述多光谱图像包括匹配图和待匹配图,包括:
7、使用6个尺度,12个方向的loggabor滤波器对输入的多光谱图像进行滤波,所述多光谱图像包括匹配图和待匹配图,滤波器方向为0°、15°、30°、45°…、165°,各个滤波器方向之间的间隔为15°,将得到的6*12个响应图按照尺度方向将值取绝对值后相加,得到12张响应特征图,逐点将12张响应特征图中最大的值所在的响应特征图的编号作为输出,形成mim图,mim图具有和输入图像相同的尺寸,每一个点的坐标值为最大响应特征图的编号,范围为1到12。
8、利用相位一致性特征提取所述mim图的somim1和somim2两个二阶mim层。
9、优选地,所述的利用相位一致性特征提取所述mim图的somim1和somim2两个二阶mim层,包括:
10、将mim层中的值逐点除以2并向下取整,得到二阶mim层的第一个响应值somim1,将mim层中的值,逐点除以2并向上取整,得到二阶mim层的第二个响应值somim2,somim1层和somim2层是由一阶mim层逐点生成的特征图,somim1层和somim2层的特征图大小与mim层相同,somim1层相对于somim2层具有15°的旋转。
11、优选地,所述的分别对应各个特征点在所述两个二阶mim层上分别构建两个描述子,分别对两个描述子进行旋转,得到匹配图的描述子集合和待匹配图的描述子集合,包括:
12、对输入的多光谱图像分别在somim1层上和somim2层上按照公式(1)构建两个描述子,分别对两个描述子按照公式(2)进行旋转,得到匹配图的描述子集合q(h)和待匹配图的描述子集合
13、构建初始描述子:在特征点邻域,以48个像素作为半径分别在somim1和somim2两个mim层上构建圆形描述子,圆形描述子具有三个圆环,最内的圆不进行分割,外面两圈圆环分别分成12个块,每一块的编号为hr,d,其中r为圆环编号,d为每一圆环的块的个数,最内层因为不进行区分,即最内层的圆表示为一个块h0,0,第一层圆环的第一个块表示为h1,0,最后一个块为h1,11,从中央圆开始,对每一块都进行直方图统计,即统计值为1、2、3、4、5和6六个数值的个数,每一块生成一个6维的向量,将25个块的6维向量按照顺序连接起来,形成一个150维度的向量,如下公式(1),其中n=3,no=6
14、
15、表示连接,h0,0表示中心圆环的描述子部分,hi,j表示每一个圆环中的描述子部分,将所有这些描述块连接起得到初始描述子h;
16、旋转描述子:将初始描述子h中的25个块进行重排序,用[a]m表示a对m的余数,则旋转后的描述子为:
17、
18、表示连接,h0,0表示中心圆环的描述子部分,hi,j表示每一个圆环中的描述子部分,将所有这些描述块连接起来构成描述子,该描述子为公式1的描述子旋转而成,hk表示将h描述子旋转k次后生成的描述子;
19、对于每一块的统计值,同样进行位移,位移值为在两个somim层上分别得到12个描述子,每一个点生成24个描述子集合,即:
20、
21、其中表示特征点在somim1上的编号为0的描述子,表示特征点在somim2上的编号为0的描述子;
22、q(h)和描述子分别为匹配图和待匹配图上面的特征点集合,的生成方法与q(h)相同。
23、优选地,所述的对所述匹配图的描述子集合和所述待匹配图的描述子集合进行匹配处理,获取所述匹配图和待匹配图的描述子的匹配结果,包括:
24、采用最邻近算法对已有描述子进行粗匹配,并使用ransac方法进行过滤,得到最终的匹配结果。对于两个描述子集合,q(h)和本发明
25、使用q(h)中的第一个描述子分别与中的24个描述子分别计算欧氏距离,将所有欧氏距离中的最小距离确定为q(h)和之间的距离
26、
27、将所述距离确定为所述匹配图和待匹配图的描述子的粗匹配结果,使用随机抽样一致ransac方法对所述粗匹配结果进行过滤,获取所述匹配图和待匹配图的描述子的最终匹配结果,该最终的匹配结果中包括确认匹配图上的特征点和待匹配图片上的特征点的坐标信息。
28、由上述本发明的实施例提供的技术方案可以看出,本发明实施例采用离散旋转角度的方法,将旋转度数离散成几个值,构建圆环形式的描述子解决旋转的多光谱图像的匹配问题。
29、本发明附加的方面和优点将在下面的描述中部分给出,这些将从下面的描述中变得明显,或通过本发明的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!