一种异质传感器信息融合方法及装置与流程
本发明涉及传感器信息融合,尤其涉及一种异质传感器信息融合方法及装置。
背景技术:
1、各类型传感器具有不同优势,例如雷达具有可全天候工作、体积小、可测速测距等优点,红外传感器则具备受光照条件影响小、角度测量精确等优势。但单一传感器都会受到传感器本身性能和功能的限制,工作模式与获取的目标信息较为单一,如毫米波雷达的点云数据较稀疏、虚警较多且易受干扰等,可见光相机受天气影响大,受光照条件影响大等,红外传感器监控范围小、受温度影响大等,因而单一传感器难以适应当前日益复杂的使用需求。因此,在单一传感器检测的基础上,对不同传感器的信息进行融合,有助于提升识别效果与对复杂环境的适应能力。
2、异质传感器由于探测到的信息类型不同,例如毫米波雷达的探测信息通常是角度、距离及速度等,而红外成像传感器得到的信息通常是图像像素中的位置、角度等,两者是不同量纲的传感器检测信息,因而不能直接进行信息融合。也因此,现有技术中多传感器信息融合方法通常都是在数据关联层面进行匹配,如毫米波雷达与红外相机的信息融合的常用方法即是首先将毫米波雷达与红外相机进行空间上的坐标转换,再将雷达点映射到红外图像像素坐标系上,最后将雷达点与红外图像目标进行简单的匹配。但该类方法难以将异质异类的传感器信息进行表达融合,且在复杂环境下通常难以取得较好的效果,例如毫米波雷达存在虚警较多的问题,而红外图像的纹理及细节信息相对简单,因此可能造成与红外目标匹配的是雷达虚警点,或真正的雷达目标点无红外目标进行匹配。
3、中国专利申请cn114994655a公开一种基于adaboost的雷达点迹和红外点迹复合跟踪处理方法,通过使用假设航迹作为机器学习训练样本,训练adaboost分类器对假设航迹进行真假分类,并对复合航迹进行滤波更新。但是该方法需要依赖adaboost分类器对真假点迹/航迹进行分类以及对样本进行离线标记,因而需要具备大量的先验信息,不仅实现复杂,且仍然会存在对复杂场景的适应性较差的问题。
技术实现思路
1、本发明要解决的技术问题就在于:针对现有技术存在的技术问题,本发明提供一种能够实现异质传感器表达融合且实现方法简单、融合效率高且复杂场景适应性好、抗干扰性强的异质传感器信息融合方法及装置。
2、为解决上述技术问题,本发明提出的技术方案为:
3、一种异质传感器信息融合方法,步骤包括:
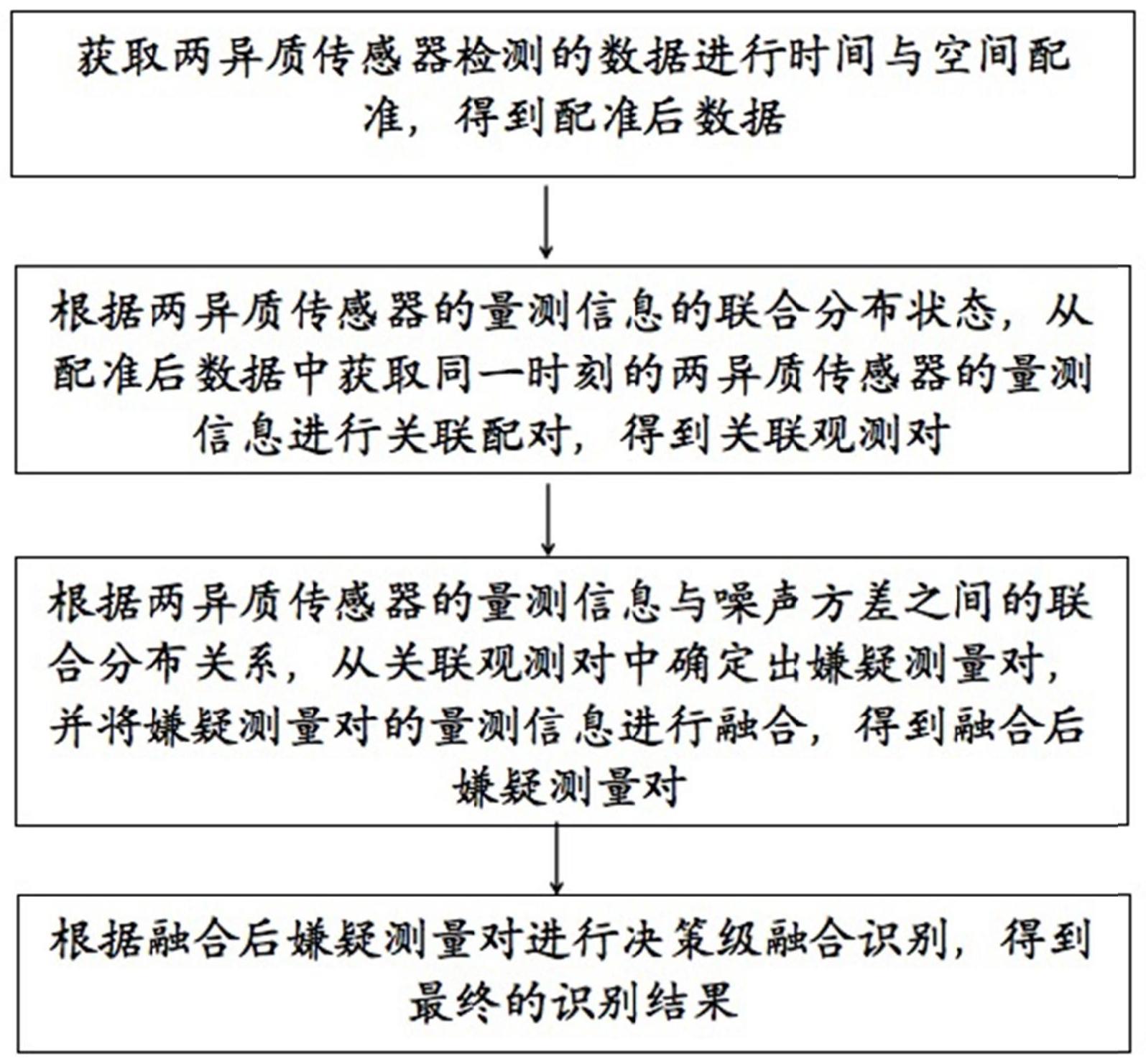
4、步骤s01.获取两异质传感器检测的数据进行时间与空间配准,得到配准后数据;
5、步骤s02.根据两异质传感器的量测信息的联合分布状态,从所述配准后数据中获取同一时刻的两异质传感器的量测信息进行关联配对,得到关联观测对;
6、步骤s03.根据两异质传感器的量测信息与噪声方差之间的联合分布关系,从所述关联观测对中确定出嫌疑测量对,并将所述嫌疑测量对的量测信息进行融合,得到融合后嫌疑测量对;
7、步骤s04.根据所述融合后嫌疑测量对进行决策级识别,得到最终的识别结果。
8、进一步的,所述量测信息包括方位角和俯仰角,所述步骤s02中,通过使用两异质传感器得到的方位角和俯仰角构建服从自由度为2的卡方分布的第一统计判决量t,当所述第一统计判决量t大于预设门限λ时,判定待判别的两异质传感器的量测值为来自相同位置的关联观测对,否则判定不是来自相同位置的关联观测对,其中所述预设第一门限λ根据自由度为2的卡方分布设置得到。
9、进一步的,所述第一统计判决量t的计算表达式为:
10、
11、其中,和分别为第一传感器、第二传感器得到的方位角量测值,和分别为第一传感器和第二传感器得到的俯仰角量测值,σrθ,分别为第一传感器得到的方位角和俯仰角量测值的方差,σiθ,分别为第二传感器得到的方位角和俯仰角量测值的方差,所述第一传感器与第二传感器为异质传感器。
12、进一步的,所述步骤s03中,根据异质传感器的量测信息与噪声方差之间的联合分布关系,从所述关联观测对中确定出嫌疑测量对包括:使用两异质传感器得到的方位角和俯仰角以及两异质传感器方位角测量噪声方差、两异质传感器俯仰角测量噪声方差构建服从自由度为2的卡方分布的第二统计判决量,α为将两个不同目标观测误判为同一目标观测的概率,当所述第二统计判决量大于预设第二门限判定待判别的两异质传感器的量测值为嫌疑测量对,其中所述预设第二门限根据自由度为2的卡方分布设置得到。
13、进一步的,所述第二统计判决量的计算表达式为:
14、
15、其中,表示k时刻第i个第一传感器量测信息与第j个第二传感器量测信息之间的第二统计判决量,分别为k时刻第一传感器的第i个方位角观测、第二传感器的第j个方位角观测、第一传感器的第i个俯仰角观测以及第二传感器的第j个俯仰角观测,分别为第一传感器的方位角测量噪声方差、第一传感器的俯仰角测量噪声方差、第二传感器的方位角测量噪声方差、第二传感器的俯仰角测量噪声方差,所述第一传感器与第二传感器为异质传感器。
16、进一步的,所述步骤s03中,将嫌疑测量对的方位角使用两异质传感器的方位角测量噪声方差将两异质传感器的方位角进行加权,得到融合后方位角,将嫌疑测量对的俯仰角使用两异质传感器的俯仰角测量噪声方差将两异质传感器的俯仰角进行加权,得到融合后俯仰角。
17、进一步的,所述融合后方位角、融合后俯仰角分别按下式计算得到:
18、
19、
20、其中,分别为k时刻的融合后方差角和融合后俯仰角,分别为k时刻第一传感器的第i个方位角观测、第二传感器的第j个方位角观测、第一传感器的第i个俯仰角观测以及第二传感器的第j个俯仰角观测,分别为第一传感器的方位角测量噪声方差、第一传感器的俯仰角测量噪声方差、第二传感器的方位角测量噪声方差、第二传感器的俯仰角测量噪声方差,所述第一传感器与第二传感器为异质传感器。
21、进一步的,所述步骤s04中使用证据理论方法进行决策级识别,其中通过将两个传感器获得的识别结果中目标类属置信度作为证据体,计算两异质传感器信息之间的相互支持度和冲突强度,以衡量不同传感器信息对最终融合信息的贡献度,再根据相互支持度和冲突强度对两异质传感器信息进行加权,得到融合结果。
22、进一步的,所述使用证据理论方法进行决策级识别的步骤包括:
23、s401.参数初始化:将两异质传感器获得的识别结果中目标类属置信度作为证据体,对任意证据设置基本概率分配函数,计算各证据体间冲突强度值以及相互支持度值;
24、s402.冲突检测:判断所述相互支持度值是否大于预设门限值,如果是对证据进行融合获得当前融合置信度后转入步骤s404,否则转入步骤s403;
25、s403.分别计算两异质传感器与前一时刻融合证据之间的整体距离,并选择与前一时刻融合证据距离小的传感器作为当前周期证据;
26、s404.综合当前周期及前多个历史周期获得的证据计算所有证据体对各证据体的总的支持度;
27、s405.根据所述所有证据体对各证据体的总的支持度计算权重值以加权修正证据mwae;
28、s406.计算对所述加权修正证据mwae融合多次得到每个类别的融合置信度,并判定最高置信度对应的类别为最终的目标类属。
29、一种异质传感器信息融合装置,该装置包括:
30、时空配准模块,用于获取两异质传感器检测的数据进行时间与空间配准,得到配准后数据;
31、融合检测模块,用于根据两异质传感器的量测信息的联合分布状态,从所述配准后数据中获取同一时刻的两异质传感器的量测信息进行关联配对,得到关联观测对;
32、融合跟踪模块,用于根据两异质传感器的量测信息与噪声方差之间的分布关系,从所述关联观测对中确定出嫌疑测量对,并将所述嫌疑测量对的量测信息进行融合,得到融合后嫌疑测量对;
33、融合识别模块,用于根据所述融合后嫌疑测量对进行决策级识别,得到最终的识别结果;
34、或该装置包括处理器以及存储器,所述存储器用于存储计算机程序,所述处理器用于执行所述计算机程序以执行如上述方法。
35、与现有技术相比,本发明的优点在于:本发明通过将两异质传感器检测的数据进行时间与空间配准后,在融合检测过程中基于数据关联方法根据两种传感器的目标点的联合分布状态进行关联配对,以将目标产生的量测与杂波产生的量测分开,可以简单、高效的实现异质异类分布式传感器不同量纲的信息在表达层面进行融合;在融合跟踪过程中,再根据两异质传感器的量测信息与噪声方差之间的联合分布关系将关联观测对的量测信息进行融合,能够有效地提升匹配的准确率,从而最终经过决策级识别能够得到精准的识别结果,有效提升识别性能。
- 还没有人留言评论。精彩留言会获得点赞!