基于二阶分布及不确定性感知聚类融合的目标检测方法
1.本发明涉及不确定性估计领域及目标检测领域,特别涉及一种基于二阶分布及不确定性感知聚类融合的目标检测方法。
背景技术:
2.随着深度学习方法的快速发展,采用深度学习方法的目标检测模型也取得了巨大的成功,被广泛应用于医学影像识别、自动驾驶感知、人脸识别等领域。然而在如上这些安全敏感的领域中,模型在给出预测的同时,具备提供校准的、鲁棒的、高效的不确定性估计的能力是至关重要的。
3.当前基于深度网络的目标检测模型(如redmon j, divvala s, girshick r, et al. you only look once: unified, real-time object detection[c]//proceedings of the ieee conference on computer vision and pattern recognition. 2016: 779-788.,以及girshick r. fast r-cnn[c]//proceedings of the ieee international conference on computer vision. 2015: 1440-1448.,以及liu w, anguelov d, erhan d, et al. ssd: single shot multibox detector[c]//european conference on computer vision. springer, cham, 2016: 21-37.)往往将通过softmax函数输出的类别概率解释为分类置信度,并且通过学习预测框与目标真实框的iou给出了回归任务的置信度,然而这样得到的置信度是非校准的,在面对分布外样本时,其给出的置信度估计是不可靠的。
[0004]
深度学习中的不确定性主要有两种来源:偶然不确定性、认知不确定性。为解决当前目标检测模型无法给出可靠不确定性估计的问题,在现有技术中,往往使用mc-dropout(如harakeh a, smart m, waslander s l. bayesod: a bayesian approach for uncertainty estimation in deep object detectors[c]//2020 ieee international conference on robotics and automation (icra). ieee, 2020: 87-93.)以及ensemble方法评估认知不确定性;通过直接建模方法(如choi j, chun d, kim h, et al. gaussian yolov3: an accurate and fast object detector using localization uncertainty for autonomous driving[c]//proceedings of the ieee/cvf international conference on computer vision. 2019: 502-511.)评估偶然不确定性。采用以上技术的可信目标检测模型,要么受限于计算代价过高的问题;亦或仅仅建模两种不确定性中的一种,限制了模型的应用广度。
技术实现要素:
[0005]
本发明实施例提供基于二阶分布及不确定性感知聚类融合的目标检测方法,旨在解决现有技术无法在同时给出精准的预测、评估偶然不确定性和认知不确定性的同时,保证极低的计算代价的技术问题。
[0006]
为此,本发明实施例提供如下技术方案:
基于二阶分布及不确定性感知聚类融合的目标检测方法,包括:基于主观逻辑理论,定义目标类别服从类别分布(categorical distribution),并定义狄利克雷分布(dirichlet distribution)为类别似然的共轭先验;基于yolov3目标检测模型构建可信目标检测模型分类分支,以神经网络输出作为主观意见,将神经网络的学习定义为一个证据获取过程,并从数据中学习得到通过获取证据产生此主观意见的函数;将目标位置偏移量的学习定义为一个证据获取过程;基于yolov3目标检测模型构建可信目标检测模型回归分支,定义目标位置偏移量对应的四个参数分别服从高斯分布,并定义高斯逆伽马分布(normal inverse gamma distribution)为高斯似然的共轭先验;获取训练样本;根据所述训练样本及对应标签,训练可信目标检测模型分类分支学习狄利克雷分布的参数;根据所述训练样本及对应标签,对标签进行逆运算,训练可信目标检测模型回归分支学习高斯逆伽马分布的参数;获取测试样本;通过所述训练得到的可信目标检测模型预测所述测试样本中目标对应的狄利克雷分布以及高斯逆伽马分布的参数;基于所述可信目标检测模型预测得到的狄利克雷分布参数,根据主观逻辑理论计算所述测试样本中目标对应预测框类别以及类别不确定性;基于所述可信目标检测模型预测得到的所述四个目标位置偏移量对应的高斯逆伽马分布的参数,计算所述测试样本对应预测框位置以及回归任务中的偶然不确定性以及认知不确定性;通过融合四个位置参数对应的不确定性以获得一个单一的不确定性估计;通过scaled-sigmoid函数将回归任务中的两种不确定性映射为值域为[0,1]的小数,并基于映射后的不确定性估计计算回归置信度;基于模型输出的类别不确定估计计算类别置信度;基于类别置信度以及回归置信度计算对于目标框预测的整体置信度;将所述可信目标检测模型输出的预测框以及对应的狄利克雷分布加入输入预测框集合以及预测框对应的狄利克雷分布集合;基于所述得到的预测框集合,选取回归置信度得分最高的预测框作为聚类中心;基于空间邻近性,将与聚类中心预测框交并比分数大于预设阈值的预测框加入当前预测框簇,并将所述预测框及对应分布从原集合中删除;将聚类中心预测框的位置信息作为针对此目标的最终单一预测框对应的位置信息;基于主观意见融合理论,将所述预测框簇中针对同一目标的狄利克雷分布集合进行融合得到针对此目标的最终单一预测框的类别信息以及对应的单一狄利克雷分布,并基于所述单一狄利克雷分布计算得到类别置信度;将所述得到的回归置信度最高得分预测框位置信息、所述单一预测框类别信息、
回归置信度以及类别置信度进行组合作为针对此目标的最终预测框,将所述最终预测框加入输出预测框集合;重复此过程,直至所述可信目标检测模型输出的所述预测框集合及所述分布集合为空;在所述测试样本上可视化所述输出预测框集合中的预测框。
[0007]
本发明提出的可信目标检测模型具有如下优点:(1)首先基于主观逻辑建模了类别不确定性,相较于传统方法使用一阶概率表达不确定性,后者缺点在于无法反应所给出概率的可信程度,主观逻辑通过在主观意见中包含不确定性质量来显式建模不确定性,从而具有反映所给出的概率是否可靠的能力;(2)主观意见可以通过狄利克雷分布表达,这使得可以通过神经网络学习观测样本中存在的证据来生成主观意见;(3)将对于目标位置的学习定义为一个证据获取过程,在假设目标位置坐标服从高斯分布的基础上,建模定义在一阶高斯分布之上的高斯逆伽马分布,从而可以在一次神经网络前向传播过程中,同时建模偶然不确定性以及认知不确定性,相较贝叶斯神经网络通过采样来建模认知不确定性的方式,本发明采用的方法不仅大幅减少了计算代价,同时提供了更精准的不确定性估计;(4)本发明还包含一种不确定性感知的聚类融合后处理方法,相较于传统非极大值抑制方法,不仅在模型处理分布外样本时,同样能够提供精准的不确定性估计从而降低了由于模型过度自信所导致的多检、误检情况;(5)将负责预测同一目标的不同预设框对应的检测头视为专注于不同类型目标的检测器,将模型预测的针对同一目标的不同狄利克雷分布视为关于此目标类别信息的不同方面信息来源,采用主观意见融合方法将针对同一目标的不同狄利克雷分布融合,从而可以更加充分的利用模型学习到的关于目标类别的不同方面证据。
附图说明
[0008]
为了更清楚的说明本发明实施的技术方案,下面将对实施例中所需要使用的附图作简要介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,可以根据这些附图获得其他的附图。
[0009]
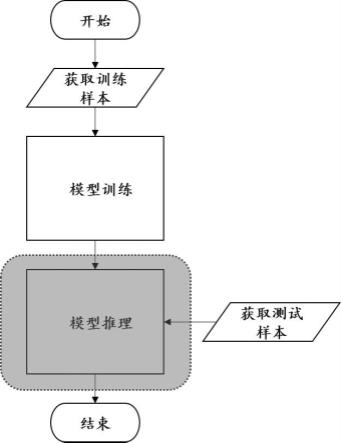
图1是本发明实施例目标检测方法的整体流程图。
[0010]
图2是本发明实施例目标检测方法的模型推理流程图。
[0011]
图3是本发明实施例目标检测方法的模型结构图。
[0012]
图4是本发明实施例不确定性感知的聚类融合方法的流程图。
具体实施方式
[0013]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0014]
为了使本发明实施例的方案更容易理解,并且更好的体现与现有的实施方案的区
别,下面首先对现有技术中已有的可信目标检测方法做简要说明。
[0015]
现有可信目标检测方法可以简要分为三类:采用mc-dropout或者deep ensemble方法仅估计认知不确定性的可信目标检测方法、采用直接建模方式仅估计偶然不确定性的可信目标检测方法、同时采用上述两种方法同时估计偶然不确定性以及认知不确定性的可信目标检测方法。此外,现有目标检测模型往往采用多个预测框预测同一目标,最后通过非极大值抑制(non maximum supression)去除冗余预测框。然而,不同的预测框对应的分布可能包含对于预测目标的不同方面的信息,采用非极大值抑制可能会造成信息损失。
[0016]
由于贝叶斯神经网络通过定义网络权重服从高斯分布,进而通过变分推断以及蒙特卡罗方法近似推断出网络权重的后验分布,但往往带来高昂的计算代价。通过采用mc-dropout的深度神经网络亦或deep ensemble方法估计认知不确定性虽然相较于贝叶斯神经网络减少了计算代价,但上述方法要么需在测试阶段多次运行神经网络、要么需要同时训练多个神经网络。与非贝叶斯深度神经网络对比,均无法在单个神经网络单次前向传播中估计认知不确定性。本发明实施例所提供的方法在将高斯逆伽马分布定义为高斯似然函数的共轭先验前提下,将深度网络学习过程定义为一个证据获取过程,实现了在一次前向传播中,同时估计偶然不确定性以及认知不确定性。
[0017]
现有可信目标检测方法中,往往通过直接建模方法也就是一阶概率估计目标检测中存在的偶然不确定性,然而得到的概率估计往往是非校准的,并且在处理分布外(out of distribution)样本时,可能会出现过于自信的预测(over-confidence),而本发明实施例通过建模二阶分布学习数据中存在的证据则在处理分布外数据时由于收集到的证据较少,因此仍然可以提供较高的不确定性估计。
[0018]
综上所述,本发明实施例所提供的方案,不仅可以在处理分布外样本时,仍然能够给出鲁棒的、校准的不确定性估计,并且还能在一次前向传播中完成认知不确定性的评估,相较于贝叶斯神经网络、mc-dropout以及deep ensemble方法大大减少了计算代价。
[0019]
由于本发明实施例基线模型为yolov3目标检测模型,因此有必要对yolov3目标检测模型进行简要的描述。yolov3模型为单阶段目标检测模型,其特点为通过将不同深度卷积层所提取得到的特征图划分为网格结构,并且在每一个网格上预设na个先验框,将落在相应网格内的目标与预设框计算宽度比例以及高度比例,筛选出比率小于预设阈值的先验框作为正样本预测框,从而同时预测目标的位置信息、类别信息以及置信度。采用预设框机制不仅可以使得密集场景下多个物体落在同一网格中,模型无法同时兼顾预测的缺点,而且通过聚类算法统计训练样本中目标框的尺度情况,给出更加贴合真实目标尺度的预设框,从而使得模型可以基于预设框预测目标相对于预设框的偏移以及缩放倍数,相较于直接预测目标位置及大小,前者可以更加容易的预测出目标的真实位置。
[0020]
为简洁起见,此处给出本发明公式所使用的下标符号含义:i表示正样本先验框对应索引位置;j表示对于同一先验框对应的预测结果中不同的位置参数变量对应的索引位置;k表示对于同一先验框对应的预测结果中类别向量中的类别索引位置;k表示对于同一先验框对应的预测结果中类别向量所包含的类别数量,r表示对于可信yolov3目标监测模型输出的预测框进行聚类后得到的预测框簇索引。本发明实施例首先构建可信yolov3目标检测模型分类分支,由于目标检测任务定义单张图片为一个样本,但是单张图片中很可能包含多个不同目标,此外,由于yolov3模型标签匹配算法通过计算目标框与预设框之间的
尺度比例,选取与目标尺度匹配的正样本预测框进行预测。
[0021]
然而,采用上述标签匹配算法可能导致存在多个预设框负责预测同一个目标框。因此,将每一个正样本预测框定义为从总体中独立同分布采样得到的样本,并定义每一个正样本预测框对应的类别服从类别分布,且将狄利克雷分布作为类别分布似然函数的共轭先验,并通过训练神经网络输出针对每一个正样本预测框类别对应的证据向量,即为:,其中可信目标检测分类分支神经网络通过以函数形式表示,其中为第i个正样本预测框对应的输入,为可信目标检测分类分支神经网络对应的参数,其通过网络预测得到的证据向量得到对应狄利克雷分布的参数,通过计算狄利克雷分布的期望,其中通过公式7计算得到,即可得到对于类别概率的估计。
[0022]
采用贝叶斯风险作为神经网络的损失函数,对应于可信目标检测中的分类分支,对于单个正样本预测框的损失函数如公式1所示,其中k为类别总数,为k维多项贝塔函数:此外,对于无法正确分类的样本,希望网络输出的证据为零,因此通过加入正则项来移除non misleading证据,第i个正样本预测框对应的正则项损失函数如公式2所示,其中表示狄利克雷分布,表示伽马函数,表示逆伽马函数:表示逆伽马函数:表示逆伽马函数:综上所述,分类分支损失函数为:其中为衰减系数,t为当前训练epoch轮数,anneal_step为预先设置的超参数。衰减系数的目的是防止模型过早收敛,导致模型学习不够充分。
[0023]
基于主观逻辑理论,通过公式6计算得到类别不确定性估计:基于主观逻辑理论,通过公式6计算得到类别不确定性估计:并基于网络输出的对于预测框i的类别概率最大值计算得到类别置信度估计:
对于可信yolov3目标检测模型回归分支的构造,同样遵循上述分类任务中样本的定义方式,即为:每一个正样本先验框为一个从总体中采样得到的独立同分布样本。
[0024]
对于目标检测任务中的回归问题,通常针对每一个目标,需要预测四个参数,(x1,y1,x2,y2)或(x,y,w,h),前者表示目标的左上角坐标以及右下角坐标,后者表示目标相对于所在图片的中心坐标位置以及目标框的宽高信息。本发明实施例采用yolov3作为基线模型,如公式9、10、11、12所示,yolov3采用后者表示方式基于预设框机制对目标位置进行预测,其中表示sigmoid函数,表示yolov3所输出预测框的坐标,为负责预测目标的单元格索引,为先验框对应的宽/高值,为yolov3输出的变换前的预测值。
[0025][0025][0025][0025]
由于可信目标检测回归分支采用二型极大似然估计作为神经网络损失函数,因此,本发明实施例基于公式13、14、15、16对目标标签进行逆运算得到对应目标偏移量标签,从而保留了预设框机制的优点,其中如公式17为sigmoid的反函数。
[0026][0026][0026][0026][0026]
定义对目标坐标进行逆变换后的偏移量标签 分别服从先验分布为高斯逆伽马分布的高斯分布,且相互独立。随机向量,,,为回归分支网络参数,为正样本预测框索引,分量索引。
[0027]
针对每一个正样本预测框坐标,定义其服从高斯分布:并定义高斯逆伽马分布(normal inverse gamma distribution)为高斯分布似然函数的共轭先验:
从高斯逆伽马分布中进行采样可以得到似然函数的一个实例,即为:,可以将此高斯逆伽马分布视作一个高阶证据分布,其定义在得到观测样本的未知低阶似然分布之上。
[0028]
本发明实施例通过构造可信yolov3回归分支预测此高阶证据分布的参数,此方法相较于之前相关工作优点在于在一次前向转播中即可完成对于目标坐标的预测,并且同时给出偶然不确定性以及认知不确定性的估计。
[0029]
在得到样本对应的高斯逆伽马分布后,通过公式20,21,22计算其对应的预测值,偶然不确定性以及认知不确定性:::下面给出训练模型输出高斯逆伽马分布参数的方法,将对于高斯逆伽马分布的学习分为两个子任务:最大化支持获取到给定观测数据的模型证据;当预测出现错误时,最小化证据;对于任务(1),采用二型极大似然估计最大化模型证据即为边际似然函数,其中:其中,边际似然函数如公式24所示,其中:对于任务(2),通过添加错误证据惩罚项来最小化错误预测中的证据。
[0030]
此处有必要对于nig分布的参数进行一定的解释,通常可以将共轭先验的参数解释为其与已观测到的具有参数指定性质的虚拟观测数有关。以高斯逆伽马分布为例,参数v表示均值为从v个均值为γ的虚拟观测中估计得到,参数α以及参数β表示方差为从2α个均值为γ,平方偏差和为2β的虚拟观测中估计得到。
[0031]
因此,将网络预测得到的虚拟观测数之和定义为可信目标检测回归证据分布的证据总量:并基于证据总量,定义证据正则项,其正比于预测与真实标签的偏差程度:当预测出现错误时,此正则项会施加惩罚,惩罚程度正比于证据总量;反过来,只要模型预测正确,那么其据总量便不会受到惩罚而因此减小。
[0032]
根据上述证据深度回归损失函数构建方法,针对单一正样本预测框,本发明实施例所述的可信目标检测模型回归分支损失函数为:其中λ作用为权衡模型拟合和不确定性收缩的重要程度。
[0033]
综上所述,针对单个正样本预测框,本发明实施例所提出的可信目标检测模型采用如下损失函数作为优化目标:本发明实施例基于公式28所表述的损失函数,采用adam优化器训练可信目标检测模型。
[0034]
由于回归分支定义每一个先验框预测的四个参数变量相互独立,通过每一个参数变量对应的证据分布计算得到的不确定性估计也是针对单个参数变量而言的,然而最终需要提供的是对于四个参数变量的整体不确定性估计。一个直观的做法是取所有参数变量对应的不确定性估计的均值为整体不确定性估计,本发明基于公式29、30综合了四个参数变量对应的不确定性估计,从而得到对于预测框整体的回归不确定性估计,其中表示偶然不确定性估计,表示认知不确定性估计:表示认知不确定性估计:由于在后处理过滤阶段,本发明同时考虑分类置信度以及回归置信度过滤预测框,因此,需要保证回归不确定性与类别不确定性尺度一致,然而通过公式29、30计算得到的回归不确定性估计值域为,而类别不确定性估计值域为,因此,本发明采用公式31所示的scaled-sigmoid函数将回归不确定性估计的值域映射为,其目的不仅在于使其尺度与分类不确定性相匹配进而可以结合两者综合评估,而且通过映射也能够使得回归不确定性估计值的大小与样本无关,从而提供给用户一个统一的不确定性估计。为提高映射后的不确定性的可分性,在sigmoid函数中加入了超参数,其作用为调节sigmoid函数变换尺度大小,从而使得映射后的不确定性估计值更加分散:
本发明结合了回归分支输出的回归不确定性估计以及对于预测框相对于真实目标框交并比的预测值,得到了回归置信度估计,其综合考虑了对于目标位置预测的可信程度,以及准确程度:::基于所述得到的回归置信度估计以及类别置信度估计,本发明通过公式35计算得到综合考虑了分类任务以及回归任务的置信度估计:此外,由于yolov3模型标签匹配算法的性质有可能产生多个先验框负责同一个目标的情况,因此在预测阶段,针对同一目标,与其对应可能存在多个预测框,传统nms基于预设阈值,首先将网络预测的置信度低于预设阈值的预测框过滤掉,其次针对同一类别,以置信度最高的预测框为准,基于交并比得分过滤掉冗余检测框。
[0035]
然而,基于网络预测的置信度筛选预测框存在如下问题:(1)当yolov3置信度预测分支处理分布外样本时,其给出的置信度估计是不可靠的;(2)网络负责预测同一目标的多个预测框可能包含对于目标位置以及目标类别的不同方面的信息,直接丢弃可能会损失有利于模型预测以及不确定性评估的有益信息。
[0036]
针对问题(1),本发明实施例提供了基于可信yolov3分类分支评估的类别不确定性,以及回归分支评估的回归不确定性(其中又包含偶然不确定性和认知不确定性),与yolov3基线模型置信度预测分支预测的置信度不同的是:首先,本发明实施例提供的类别不确定性基于主观逻辑理论,通过神经网络预测与主观意见等价的狄利克雷分布的参数,学习数据中存在的证据,从而基于证据量的大小给出可靠的不确定性评估,其衡量了模型所给出的概率分布是否可靠,而这也是分类任务中证据深度学习方法区别于yolov3基线模型通过一阶概率建模类别不确定性的方法的地方,后者在给出概率分布预测的同时,无法给出此概率分布的可靠程度。其次,本发明实施例通过定义高斯逆伽马分布为定义于高斯分布上的高阶分布,从而使得模型具备衡量所给出的分布是否可靠的能力。
[0037]
针对问题(2),本发明实施例采用融合而非丢弃的方式去除冗余检测框。引入了一种用于融合狄利克雷分布的方法。由于本发明实施例基于主观逻辑通过狄利克雷分布建模主观意见,因此可以采用主观意见融合方法融合对应于同一目标的多个狄利克雷分布,本发明实施例将不同预设框对应的检测头视作给出不同主观意见预测的来源,并且不同预设框对应的检测头均基于相同的特征输入给出主观意见预测,因此不同预设框对应的检测头
给出的主观意见是存在依赖关系的,考虑到以上特性,本发明实施例采用主观意见融合方法中的加权信念融合方法融合对应于同一目标的不同狄利克雷分布:定义代表负责预测目标的第i个先验框所给出的主观意见预测,为融合后得到的主观意见;加权信念融合通过将主观意见映射为等价的狄利克雷分布并对狄利克雷分布的证据向量基于各自狄利克雷分布置信度进行加权平均后映射回主观意见表示,其中:基于上述所提的主观意见融合方法,针对不同检测框中的狄利克雷分布,即可通过融合得到结合了不同来源信息的单一主观意见。
[0038]
本发明所提出的不确定性感知的聚类融合方法主要包含以下执行步骤:(1) 基于所述可信目标检测模型预测得到的狄利克雷分布参数集合,根据主观逻辑理论计算所述测试样本对应预测框类别向量集合以及类别不确定性集合。
[0039]
(2) 基于所述可信目标检测模型预测得到的高斯逆伽马分布参数集合,计算所述测试样本对应预测框位置集合。
[0040]
(3) 对所述得到的预测结果进行过滤处理,i表示预测结果集合中第i个预测结果对应的索引位置,基于公式34计算得到预测框回归置信度估计,基于公式8计算得到类别置信度估计,基于公式35得到整体置信度估计,将整体置信度估计值小于预设阈值的预测滤除。
[0041]
(4) 选取具有最大回归置信度的预测框作为当前簇r的聚类中心,并遍历检测框集合,基于公式将与聚类中心预测框交并比得分大于预设阈值的预测框加入当前簇,并将簇中预测框从所述可信目标检测模型输出的预测框集合中删除。
[0042]
(5) 将回归置信度最高得分预测框的位置信息作为针对此目标的最终单一预测框对应的位置信息。
[0043]
(6) 使用公式36所表述的weighted belief fusion对每一预测框簇中的不同预测框对应的狄利克雷分布进行融合,将融合后的狄利克雷分布的期望作为本簇对应唯一预测框的类别概率向量。
[0044]
(7) 基于步骤4融合得到的所述狄利克雷分布,基于公式8计算预测框对应的类别置信度估计。
[0045]
(8) 将所述得到的回归置信度最高得分预测框位置信息、所述单一预测框类别向量、回归置信度以及类别置信度进行组合作为针对此目标的最终预测,将
所述最终预测加入输出预测框集合。
[0046]
(9) 重复过程3、4、5、6、7,直至所述可信目标检测模型输出的所述预测框集合及所述分布集合为空。
[0047]
(10) 在所述测试样本上可视化所述输出预测框集合中的预测框。
[0048]
所述不确定性感知的聚类融合方法具体执行细节在方法1中进行表述,其具体执行步骤在图2网络推理流程图中进行表述。
[0049]
图3为本实施例所提出的可信yolov3目标检测网络结构简图。
[0050]
图4中,filter对应上文中步骤(3)所述过滤,cluster对应上文中步骤(4)所述聚类,weighted belief fusion 对应上文中步骤(6)所述融合。
[0051]
。
[0052]
综上所述,本发明基于主观逻辑理论建模了目标检测任务中的类别不确定性,通过在主观意见中包含不确定性质量来显式建模不确定性,从而具有反映所给出的概率是否可靠的能力。其次将对于目标位置的学习定义为一个证据获取过程,在假设目标位置坐标服从高斯分布的基础上,建模定义在一阶高斯分布之上的高斯逆伽马分布,从而可以在一次神经网络前向传播过程中,同时建模偶然不确定性以及认知不确定性,相较贝叶斯神经网络通过采样来建模认知不确定性的方式,本发明实施例采用的方法不仅大幅减少了计算代价,同时提供了更精准的不确定性估计。此外,本发明提出了一种不确定性感知的证据融合后处理方法,相较于传统非极大值抑制方法,不仅在模型处理分布外样本时,同样能够提供精准的不确定性估计从而降低了由于模型过度自信所导致的多检、误检情况。并且,将模型预测的针对同一目标的不同狄利克雷分布视为关于此目标类别信息的不同方面信息来源,采用主观意见融合方法将针对同一目标的不同狄利克雷分布融合,从而可以更加充分的利用模型学习到的关于目标类别的不同方面证据。
[0053]
以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1