一种用于红外地球敏感器的地心矢量解算方法与装置与流程
本发明属于卫星定姿,尤其涉及一种用于红外地球敏感器的地心矢量解算方法与装置。
背景技术:
1、近年来,微纳卫星技术得到迅猛发展,它有着质量轻、体积小和功耗小的特点,在航天应用领域极具潜力。目前,纳米卫星所执行的任务种类和难度在不断增加,例如要求微纳卫星实现大角度快速机动、编队飞行、双目视觉等,其中如何提高微纳卫星的机动能力是实现各项难度任务的基础。
2、而微纳卫星的机动能力取决于姿态敏感器和姿态控制器的性能,卫星的姿态敏感器包括地球敏感器,太阳敏感器,星敏感器,陀螺仪等。但在实际操作时往往需要多种敏感器的协调配合,才能准确地确定卫星的姿态。
3、红外地球敏感器对地球凝视拍摄,通过计算成像矢量的方法确定地球质心相对于敏感器的角度,再经坐标转换最终确定卫星相对地球的方位,而相对于动态扫描式红外地球敏感器而言,具有速度快,功耗小,寿命长等优势。
4、但传统的红外地球敏感器采用hough变换去除干扰,速度较慢,且该方法将地球视为球体,采用最小二乘法进行圆拟合确定地心矢量,这样并未考虑地球扁平率引入的误差,对于低轨卫星而言,地球扁率会引入较大误差,从而影响地心矢量的测量精度,导致卫星执行任务时存在危险。
5、专利文献cn103630109a公开了一种基于星光折射确定地心矢量的方法,该方法利用星敏感器通过确定星光的折射路径确定出地心的平面,共采用了三个星敏感器,其中星敏感器a指向天顶方向,用于观测直射的恒星,星敏感器b和c指向接近水平方向,用于观测折射的恒星。该方法基于光路长度去换算对应的恒星地心矢量,但是方法的缺陷是需要额外的星敏感器作为辅助,且依赖测量设备的精确度。
6、专利cn105300376a公开了一种基于紫外辐射模型的地心矢量方法提取方法,该方法包括:采集图像,通过采用sobel微分检测算子计算像素在x方向上和y方向上梯度值,以得到原图像的梯度图;通过在梯度图上统计像素点的5x5领域的局部二值模式,通过在lbp特征的所有32中模式中选取4中边缘点特征候选模式,实现边缘点的提取;构建了基于圆球模型的误差函数;通过带入边缘点,采用最小二乘算法迭代求解得到像平面的地心坐标和半径,进而解算得到地心矢量方法和地心距。该方法采用的圆球模型并未考虑地球实际存在扁平误差,从而导致最终结果准确率不高。
技术实现思路
1、为了解决上述问题,本发明提供了一种用于红外地球敏感器的地心矢量解算方法,该方法可以有效解决去除干扰点速度过慢的问题,同时提高红外地球敏感器的精度。
2、一种用于红外地球敏感器的地心矢量结算方法,包括:
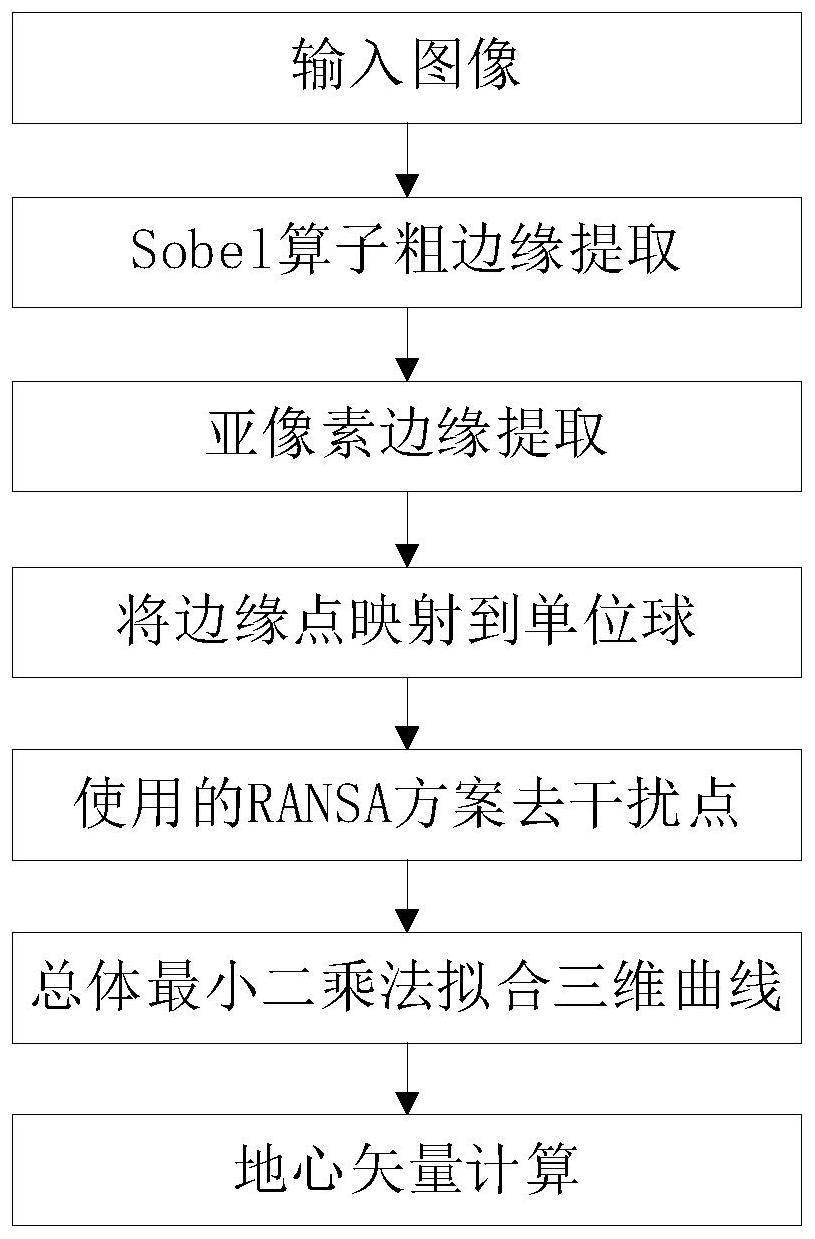
3、步骤1、通过红外地球敏感器获取红外地球图像;
4、步骤2、根据步骤1获得的红外地球图像,提取获得对应的粗略边缘点集合;
5、步骤3、根据步骤2中提取获得的粗略边缘点集合,zemike矩检测边缘法计算获得对应的亚像素边缘点集合;
6、步骤4、根据红外地球敏感器的镜头参数,将步骤3获得的亚像素边缘点集合转换为对应的单位球坐标集合;
7、步骤5、根据步骤4获得的单元球坐标集合,利用ransac方法对步骤3获得的亚像素边缘点集合进行过滤,获得有效边缘点集合;
8、步骤6、利用步骤5获得的有效边缘点集合,拟合获得对应的三维曲线参数;
9、步骤7、根据红外地球敏感器所在卫星的坐标信息与步骤6获得的三维曲线参数,计算获得用于确定卫星姿态的地心矢量。
10、本发明提供的方法通过边缘点三维曲线进行拟合消除地球扁率误差,同时采用总体最小二乘法进行参数拟合,进一步提高了参数估计的准确率,从而提供了最终地心矢量的测量精度。
11、所述卫星姿态可以用于卫星对空对地的定位工作。
12、具体的,在步骤2中,采用sobel算子计算红外地球图像的像素点梯度,并将满足像素点梯度大于梯度阈值的像素点视为粗略边缘点,遍历整个红外地球图像,获得对应的粗略边缘点集合。
13、具体的,在步骤3中,所述采用zemike矩检测边缘法计根据步骤2获得的粗略边缘点集合中每个边缘点,利用对应的领域像素计算三个不同阶的zemike矩a00,a11,a20;
14、根据计算获得的zemike矩a00,a11,a20,计算亚像素边缘点集合:
15、
16、式中,[x,y]为粗略边缘点集合中边缘点的坐标,[xz,yz]为亚像素边缘点集合中边缘点的坐标,n为预设的领域尺寸,θ=tan-1(im[a11]/re[a11])为像素夹角,d=a20/a′11为动态参数,a′11=a11ejθ。
17、具体的,在步骤4中,所述镜头参数通过多项式模型对红外地球敏感器的镜头进行径向畸变校正获得。
18、具体的,在步骤4中,所述单元球坐标合集通过将亚像素边缘点集合映射到红外地球敏感器单位球坐标系获得,具体公式如下:
19、u=xz-x0
20、v=yz-y0
21、
22、
23、za=cosθ′
24、式中,θ′为径向畸变校正后的镜头参数,[xz,yz]为亚像素边缘点集合中边缘点的坐标,[xa,ya,za]为单元球坐标合集中的坐标。
25、具体的,在步骤5中,所述ransac方法的过滤过程如下:
26、步骤5-1、在亚像素边缘点集合中随机选取三个边缘点,利用对应的单位球坐标计算获得平面法向量;
27、步骤5-2、利用计算获得的平面法向量,对亚像素边缘点集合内所有边缘点进行拟合误差分析:
28、e=|p1xa+p2ya+p3za-1|
29、式中,e为亚像素边缘点的误差值,[p1,p2,p3]为亚像素边缘点集合的平面法向量,[xa,ya,za]为亚像素边缘点对应的单元球坐标,当目标亚像素边缘点的误差值e小于et时,则将目标亚像素边缘点视为有效点,反之则滤去目标亚像素边缘点,et为预设梯度阈值;
30、步骤5-3、遍历所有亚像素边缘点集合,将所有误差值e小于阈值et1的亚像素边缘点视为有效边缘点,获得一组有效边缘点集合;
31、步骤5-4、重复步骤5-1至步骤5-3,选取有效边缘点数量最多的有效边缘点集合,采用总体最小二乘法进行拟合获得对应的三维曲线。
32、具体的,在步骤5-4中,所述总体最小二乘法的公式如下:
33、
34、三维曲线公式:ax2+bxy+cy2+dxz+eyz+fz2=0
35、式中,[a,b,c,d,e,f]为待拟合的参数,[xiyizi]为有效边缘点集合中边缘点的坐标。
36、具体的,在步骤7中,所述地形矢量的计算过程如下:
37、根据三维曲线的公式ax2+bxy+cy2+dxz+eyz+fz2=0,构建对应的矩阵:
38、
39、根据卫星的坐标信息,构建地球形状矩阵:
40、
41、其中,ra=rb=6378.137km,rc=6356.755km;
42、根据卫星的坐标信息和地球形状矩阵ap求解mp,公式如下:
43、mp=aprprptap-(rptap-1)ap
44、式中,rp为卫星相对于地球在地心惯性系下坐标;
45、根据矩阵c和mp进行svd分解,获得对应的地心矢量:
46、
47、式中,vl和vr为矩阵c完成svd分解后的左奇异矩阵和右奇异矩阵,sc为奇异值,wl为mp完成svd分解后的左奇异矩阵和右奇异矩阵,sm为奇异值,tl为旋转矩阵;
48、最后,筛选出rest[3]>0的解视为地心矢量。
49、与现有技术相比,本发明的有益效果:
50、(1)本发明采用ransac方法去除干扰点,相比于传统算法采用hough变换去除干扰点的方式,其效率更高。
51、(2)本发明将地球边缘点按三维曲线拟合,而不是三维圆,消除了地球扁率引入的误差影响。
52、(3)本发明采用总体最小二乘法进行参数拟合,考虑了系数矩阵的误差,进一步提高了参数估计的精度,进而提高了地心矢量的测量精度。
- 还没有人留言评论。精彩留言会获得点赞!