一种基于图神经网络的可见光定位方法和装置与流程
本发明实施例涉及可见光定位,尤其涉及一种基于图神经网络的可见光定位方法和装置。
背景技术:
1、可见光定位系统,因其绿色环保、精度高、抗电磁干扰强、基础设施覆盖广、成本低等优势,作为一种良好的室内定位解决方案,在学术界与工业界受到广泛关注。
2、现有可见光定位系统按接收器类型可分为基于相机的可见光定位系统和基于光电二极管的可见光定位系统。基于光电二极管(photo diode,pd)的可见光定位系统因其技术简单,所需硬件成本低,而更受青睐。其中基于光电二极管的可见光定位系统又包括基于三边定位、基于到达角和基于到达时间等定位方法。其中基于到达时间的定位方法难以实现时间同步,而基于到达角一般需要多个光电二极管,这增加了成本和硬件设计难度。基于三边定位的方法,首先利用朗伯发射定律将接收信号强度(received signal strength,rss)值转为光电二极管到对应定位灯的距离,然后通过最小二乘原理估计光电二极管位置,实现简单而且可以达到较高精度。具体参见图1,图1为基于光电二极管(pd)的可见光定位系统结构图。
3、但基于光电二极管的可见光定位系统常受到各种噪声的干扰,其中主要的噪声包括:环境光噪声、散粒噪声和热噪声。这些噪声的存在严重阻碍了现有可见光定位系统的定位精度和鲁棒性。环境光噪声是由于环境光强度随时间和空间变化引起。当环境光随时间变化造成朗伯参数的标定场景与定位场景间的环境光强有较大差异时,会导致标定场景中获得的朗伯参数不再适用于定位场景而产生较大定位误差;环境光随空间变化对可见光定位系统的影响,则是环境光强随空间的不均匀分布导致标定场景中实际测量得到的rss-距离关系可能偏离理想的曲线,进而对朗伯参数的标定造成破坏,而影响后续可见光定位系统性能。
4、单独考虑每一盏灯对环境光建模,虽然有一定抑制效果,但是其存在巨大限制。例如,现有方案融合可见光定位通过大量采集不同环境光强下的信号接收强度rss值,来拟合环境光强与rss之间的关系,然后将定位场景中接收到的rss值通过拟合得到的曲线映射到标定场景中对应的rss值以抑制环境光的影响,但是该方法为了精确拟合rss与环境光之间曲线需要采集大量的数据,而且该方法容易受到数据噪声的影响。此外,散粒噪声与热噪声多用随机过程建模为加性高斯噪声,难以在每一次定位中估计其具体数值。因此现有可见光定位系统性能会受这些噪声干扰。
技术实现思路
1、本发明提供一种基于图神经网络的可见光定位方法和装置,以提高可见光定位的鲁棒性和定位精度。
2、第一方面,本发明提供一种基于图神经网络的可见光定位方法,包括:
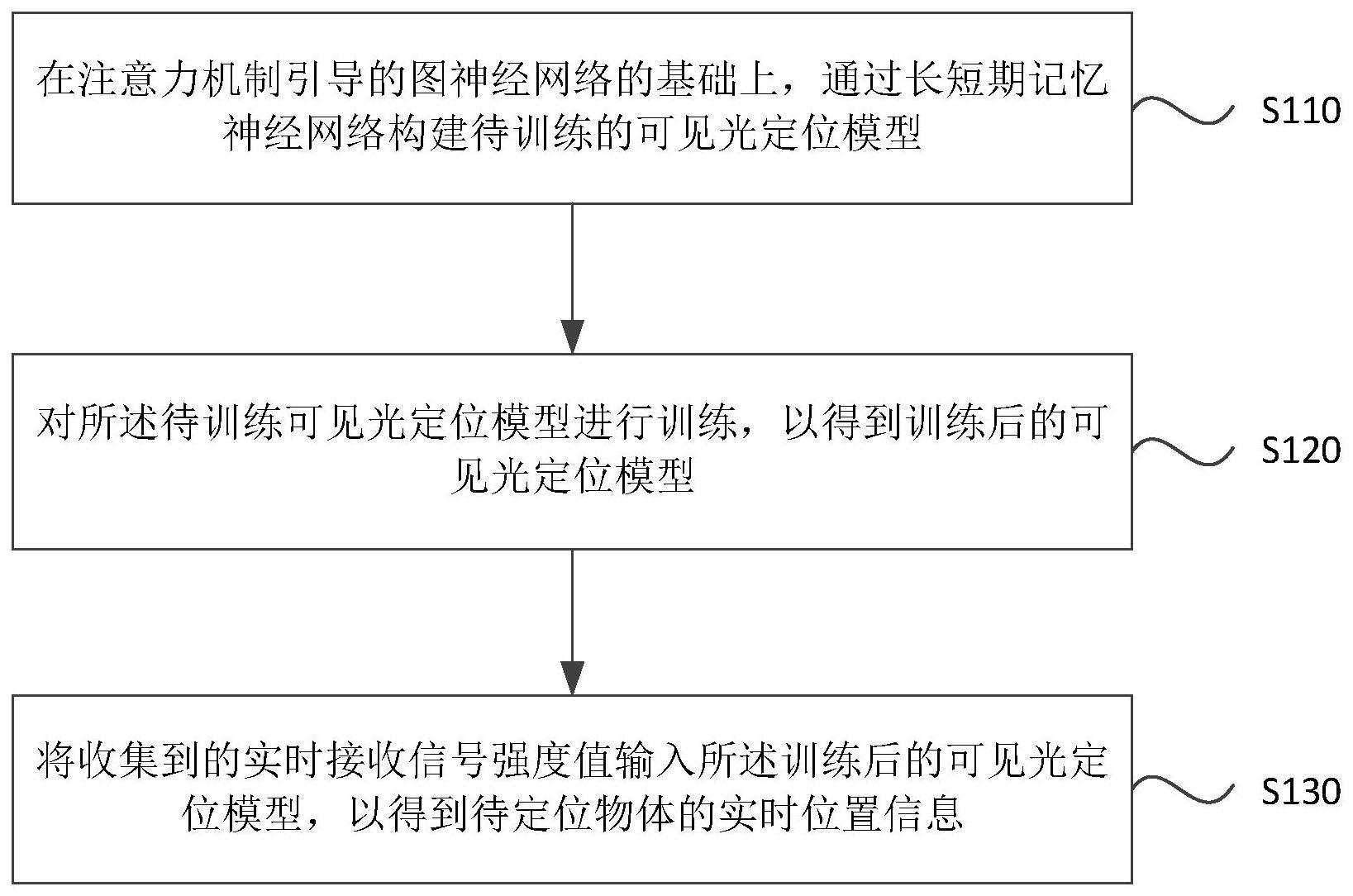
3、s110、在注意力机制引导的图神经网络的基础上,通过长短期记忆神经网络构建待训练的可见光定位模型;
4、s120、对所述待训练可见光定位模型进行训练,以得到训练后的可见光定位模型;
5、s130、将收集到的实时接收信号强度值输入所述训练后的可见光定位模型,以得到待定位物体的实时位置信息。
6、可选的,所述s110包括:
7、根据收集到的定位训练数据,利用图神经网络的空间建模能力对所述定位训练数据进行优化;
8、通过注意力机制对定位灯赋予不同权值,从而引导图神经网络的表征学习;
9、基于长短期记忆神经网络(long short-term memory,lstm)对同一轨迹相邻位置中接收信号强度值存在的时序关系进行建模,以得到待训练的可见光定位模型。
10、可选的,根据收集到的定位训练数据,利用图神经网络的空间建模能力对所述定位训练数据进行优化,包括:
11、通过信号采集装置动态收集定位灯的接收信号强度值及其对应的位置信息;
12、将收集到的带有位置标签的接收信号强度值构造成图结构;
13、定义图神经网络结构;
14、将所述图数据结构输入所述图神经网络结构中进行处理,对所述接收信号强度值进行优化。
15、可选的,所述图神经网络结构包括2层graphsage,每一层的隐藏层均有16个隐藏神经元,且每一层网络都包括均值聚合器。
16、可选的,通过注意力机制对定位灯赋予不同赋权值,从而引导图神经网络的表征学习,包括:
17、根据各定位灯对应的接收信号强度值和噪声,确定各定位光对应的信噪比;
18、构建注意力网络;
19、将所述信噪比输入所述注意力网络中,以得到各定位灯对应的权重;
20、将所述权重与各定位灯对应的接收信号强度值进行加权操作。
21、可选的,所述注意力网络由两层全连接层和一层softmax层组成。
22、可选的,基于长短期记忆神经lstm网络对同一轨迹相邻位置处接收信号强度值存在的时序关系进行建模,包括:
23、收集一段时间内加权后的接收信号强度值;
24、构建lstm网络结构;
25、将加权后的接收信号强度值送入lstm网络结构中,并保留最后一个lstm细胞的输出状态。
26、可选的,所述lstm网络结构由忘记门、输入门以及输出门组成。
27、第二方面,本发明实施例还提供一种基于图神经网络的可见光定位装置,包括:
28、模型构建模块,用于在注意力机制引导的图神经网络的基础上,通过长短期记忆神经网络构建待训练的可见光定位模型;
29、模型训练模块,用于对所述待训练可见光定位模型进行训练,以得到训练后的可见光定位模型;
30、实时定位模块,用于将收集到的实时接收信号强度值输入所述训练后的可见光定位模型,以得到待定位物体的实时位置信息。
31、可选的,所述模型构建模块具体用于:
32、根据收集到的定位训练数据,利用图神经网络的空间建模能力对所述定位训练数据进行优化;
33、通过注意力机制对定位灯赋予不同赋权值,从而引导图神经网络的表征学习;
34、基于长短期记忆神经lstm网络对同一轨迹相邻位置处接收信号强度值存在的时序关系进行建模,以得到待训练的可见光定位模型。
35、本发明的有益效果:
36、1、本发明将图神经网络用于可见光定位系统中进行信号优化和噪声抑制,相比于传统方法仅在每盏定位灯中单独对噪声建模而言,本发明通过利用图神经网络同时考虑多盏定位灯来优化rss值和抑制噪声,不仅可以有效缓解环境光随时间分布不均对可见光定位系统的影响,而且能够抑制环境光随空间分布不均对可见光定位系统的损害。
37、2、本发明利用注意力机制根据定位灯的测距精度对其赋予不同权重,从而引导图神经网络更加关注高精度的定位灯,减小了低质量、低精度的定位灯对整体性能的影响,有效提升可见光定位系统的精度和鲁棒性。
38、3、本发明通过lstm网络对同一轨迹相邻位置中rss值存在的时序关系建模,使得模型能够考虑一段时间内的rss值来估计当前位置,弥补了图神经网络在优化信号过程中仅考虑空间结构和信息的不足,进一步提升了可见光定位精度。
- 还没有人留言评论。精彩留言会获得点赞!