一种带有多个USB接口的回收终端管理系统的制作方法
本发明属于数据管理,尤其涉及一种带有多个usb接口的回收终端管理系统。
背景技术:
1、信息接入与分析相关产品在随着采集功能的多样化、提及的最小化、使用的便捷性,信息接入与分析系统的应用领域也越来越广、功能也越来越强大,除了信息接入技术影响着信息接入与分析系统,信息的分析与处理技术同样制约了此系统的各方面性能。当前较多设备选择usb传输,主要因为其数据传送较高、连接自由度较高、插入设备即可使用内置电压供给,还可根据需求定制传输模式等特点,使得usb应用较为广泛。随着usb设备的不断更新,传输速率也快速增大,能更多的满足需要高速率传输的设备。然而,原始的图像信息采用特征提取方式并能获取足够鲁棒的信息来表示图像中的物体,从而很难识别回收物并对其分类,影响了系统的工作效率。
技术实现思路
1、有鉴于此,本发明提供了一种可以提高准确识别回收物并对其进行分类和系统工作的稳定性的带有多个usb接口的回收终端管理系统,来解决上述存在的技术问题,具体采用以下技术方案来实现。
2、本发明提供了一种带有多个usb接口的回收终端管理系统,包括:
3、获取单元,用于采集待分类的多张图像,将多张图像进行预处理得到图像数据;
4、特征提取单元,用于从所述图像数据中提取图像对应的颜色特征、形状特征和角点特征,其中,颜色特征采用颜色直方图和颜色聚合向量来表征图像的像素点分别和空间位置变化,预设某一幅图像(fxy)m×n,fxy表示坐标为(x,y)处的像素值,m×n表示图像的长和宽,图像中所有像素的取值范围记为c,则图像的颜色直方图的表达式为预设αi和βi分别表示颜色直方图中的第i个区间内聚类像素和非聚类像素的数量,图像的颜色聚合向量的表达式为<(α1,β1),(α2,β2)...(αn,βn)>,形状特征包括图像轮廓的形状描述符合区域的形状描述符,角点特征为图像局部特征的角点;
5、模型构建单元,用于将所述颜色特征、形状特征和角点特征进行归一化处理得到样本图像,将样本图像输入至已训练的深度神经网路模型中进行训练;
6、图像分类单元,用于根据样本图像在深度神经网络模型进行生成模型和判别模型的图像分类以完成回收终端对应的数据管理。
7、作为上述技术方案的进一步改进,角点特征的表征过程包括:
8、预设自相关函数的表达式为e(x,y)=∑u,vwu,v|lx+u,y+v-lu,v|2,其中wu,v表示给定的窗口,l表示灰度值,e(x,y)表示图像偏移形成的窗口内像素的平均变化,当串口固定后,e(x,y)即未x、y的函数,角点则是当(x,y)取两组相互垂直的值时e(x,y)都有较大值的点;
9、令d(x,y)=lx+u,y+v-lu,v=0,忽略高阶无穷小(x2,y2),则因为e(x,y)=∑u,vwu,v|lx+u,y+v-lu,v|2=∑u,vwu,vd(x,y)2,从而有其中从而将e(x,y)记为由于a为x变化时窗口内图像一阶差分的平方和,b为y方向一阶差分的平方和,c为x方向一阶差分与y方向一阶差分的乘积。
10、作为上述技术方案的进一步改进,根据样本图像在深度神经网络模型进行生成模型和判别模型的图像分类以完成回收终端对应的数据管理,包括:
11、预设将一个数据集分为c′个类别,采用记号ωi(i=1,2...c′),x′表示图像的特征描述子,采用贝叶斯模型公式计算后验概率的表达式为pr(wi|x′)=pr(x′|wi)pr(wi)/pr(x′),以得到生成模型的图像分类结果;
12、采用向量内积来衡量其相似度的表达式为in(x,y)=<x,y>=∑ixiyi,采用所求结果与其长度的商来表示预先相似度的表达式为将样本图像对应的训练集的所有数据表示成向量的形式,所有数据映射到矢量空间得到矢量集,当需要对测试数据进行分类时,计算该数据与训练集的每个数据的相似度,然后将结果排序,选出相似度最大的k个数据,然后以投票的方式将新的数据分配到票数最多的类别中。
13、作为上述技术方案的进一步改进,所述颜色特征、形状特征和角点特征进行归一化处理得到样本图像,包括:
14、采用卡尔曼滤波算法对采集的运动目标的视频图像的质心进行运动轨迹的估计与预测,实现视频图像中运动目标的跟踪,卡尔曼滤波的执行过程包括:
15、预测值计算:x(k|k-1)=m×x(k-1|k-1)+n×u(k),计算k-1帧图像中运动目标质心的状态对第k帧图像作系统状态的预测值,其中x(k|k-1)表示基于k-1帧图像质心状态对第k帧图像质心状态的预测值,x(k-1|k-1)表示第k-1帧图像质心状态的最优结果,u(k)表示第k帧图像质心的系统控制量,通过表达式为p(k|k-1)=m×p(k-1|k-1)×mt+q开算x(k|k-1)对应的协方差的预测值,p(k|k-1)表示根据k-1帧图像质心的协方差计算第k帧图像质心协方差的预测值,p(k-1|k-1)表示k-1帧图像质心协方差的最优结果,q表示噪声协方差;
16、增益计算:通过计算第k帧图像质心的卡尔曼增益,其中x(k)表示第k帧图像质心的卡尔曼增益;
17、状态更新:通过计算第k帧图像质心系统状态最幼稚,x(k|k)表示第k帧图像质心系统状态的最优结果,z(k)表示第k帧图像质心的测量值,通过p(k|k)=(1-k(k)×h)×p(k|k-1)计算第k帧图像质心系统最优结果对应的协方差,p(k|k)表示第k帧图像质心系统最优结果对应的协方差。
18、作为上述技术方案的进一步改进,采用卡尔曼滤波算法对采集的运动目标的视频图像的质心进行运动轨迹的估计与预测,实现视频图像中运动目标的跟踪,包括:
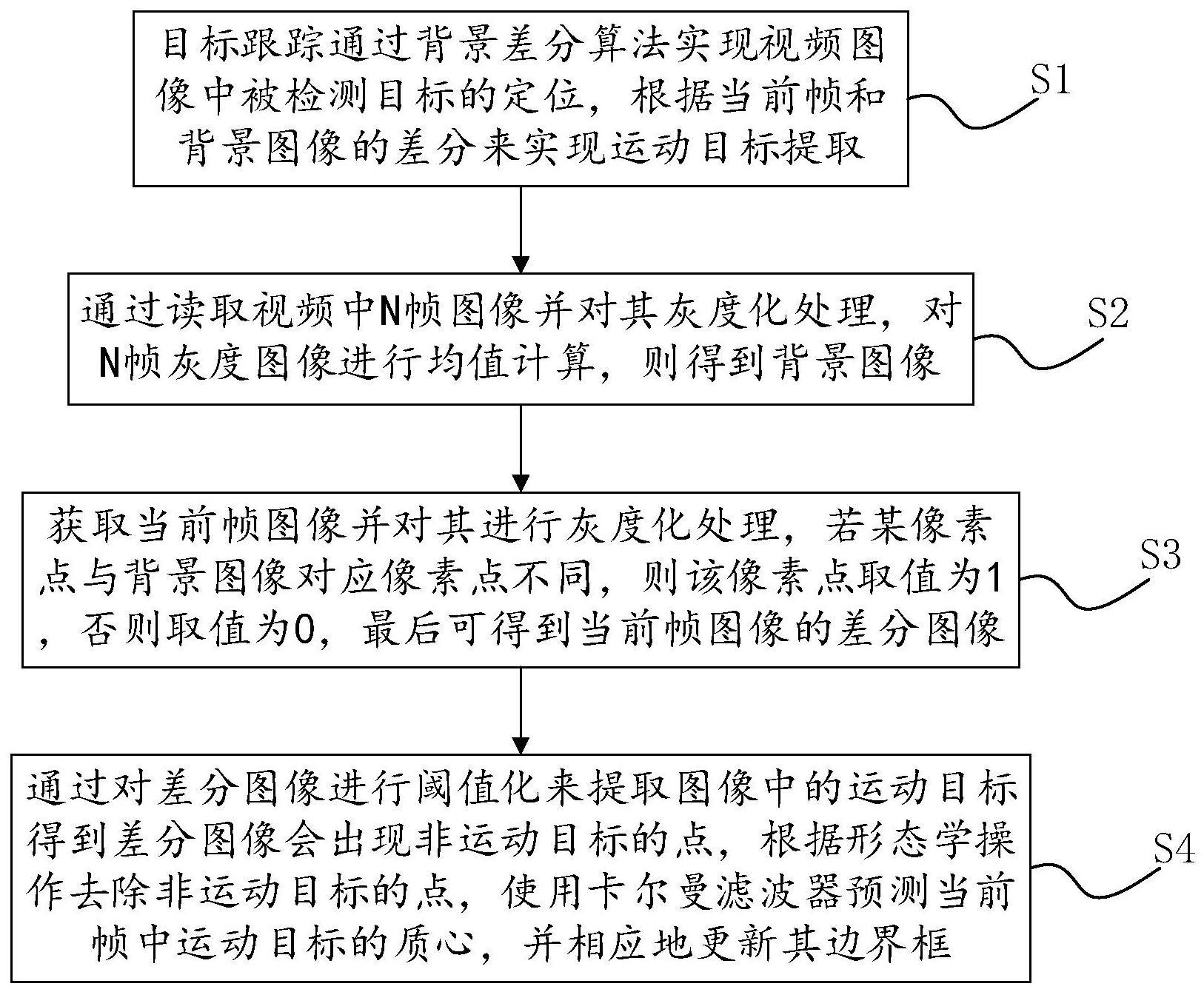
19、目标跟踪通过背景差分算法实现视频图像中被检测目标的定位,根据当前帧和背景图像的差分来实现运动目标提取,背景差分进行运动目标检测的过程包括:
20、通过读取视频中n帧图像并对其灰度化处理,对n帧灰度图像进行均值计算,则得到背景图像;
21、获取当前帧图像并对其进行灰度化处理,若某像素点与背景图像对应像素点不同,则该像素点取值为1,否则取值为0,最后可得到当前帧图像的差分图像;
22、通过对差分图像进行阈值化来提取图像中的运动目标得到差分图像会出现非运动目标的点,根据形态学操作去除非运动目标的点,使用卡尔曼滤波器预测当前帧中运动目标的质心,并相应地更新其边界框。
23、作为上述技术方案的进一步改进,双线性插值算法的图像处理过程包括:
24、计算第k帧图像pic的大小,记为三维矩阵heighjt×width×3,设置图像压缩的压缩因子fac∈(0,1),生成大小为(fac×height)×(fac×width)×3的全0矩阵new_pic,其中height表示图像的高度,width表示图像的宽度;
25、将原始图像pic边界扩展一圈,数值为0,得到的图像pic_0大小为(height+2)×(width+2)×3;
26、将缩放后的新图像new_pic中某像素位置f(zi,zj)映射回原始图像pic_0中(zij/fac,zj/fac),由于(zij/fac,zj/fac)不一定为整数,对(zij/fac,zj/fac)取整数部分得到(i,j)、取小数部分(u,v),其中u,v∈[0,1);
27、根据表达式为f(zi,zj)=(1-u)×(1-v)×f(i,j)+(1-u)×v×f(i,j+1)+u×(1-v)×f(i+1,j)+u×v×(i+1,j+1),其中f(zi,zj)表示新图(zi,zj)处的像素值,f(x,y)表示新图(zi,zj)对应在原图中的位置(x,y)处的像素值;
28、重复上述过程得到一张完整的压缩图像,读取每帧图像并进行重复以上步骤以实现视频图像的压缩。
29、可选地,支持向量机的执行过程包括:
30、首先需要训练靠近边界的数据找到决定边界,采用ωtx+b0>1来表示圆形数据和ωtx+b0<-1表示方形数据,ω表示权重向量(ω=[ω1,ω2...ωn]),x表示特征向量(x=[x1,x2...xn]),b0标识截距,ω用于决定边界的方向,b0用于决定边界的位置;
31、预设两个超平面的中间屏幕为决定边界的表达式为ωtx+b0=0,从支持向量机到决定边界的最短距离为边缘长度未该距离的两倍,若使该边缘长度最大,需要创建一个新的函数g(ω,b0),并使其值最小,则其中ti表示每一组的标记,ti∈[-1,1];
32、接着采用f(x)=ax1+bx2+c表示决定边界,当有一个测试数据x时,把x代入f(x),若f(x)>0属于圆形数据,否则属于方形数据。
33、本发明提供了一种带有多个usb接口的回收终端管理系统,通过采集待分类的多张图像,将多张图像进行预处理得到图像数据,从图像数据中提取图像对应的颜色特征、形状特征和角点特征,所述颜色特征、形状特征和角点特征进行归一化处理得到样本图像,将样本图像输入至已训练的深度神经网路模型中进行训练,根据样本图像在深度神经网络模型进行生成模型和判别模型的图像分类以完成回收终端对应的数据管理,从而提升了图像识别的精确度和系统管理的有效性,同时也提高了数据管理的鲁棒性。
- 还没有人留言评论。精彩留言会获得点赞!