不规则物体的面积和体积测量方法、系统、设备和介质与流程
本发明涉及三维测量,尤其涉及一种不规则物体的面积和体积测量方法、系统、设备和介质。
背景技术:
1、随着社会和工业的快速发展,三维测量已经成为很多工业生产中不可或缺的一部分,高精度、高速的三维测量技术不断涌现。一般而言,规则物体的面积和体积可以应用固定的面积和体积公式计算得出,但在精密零件加工、古建筑复原、文物修复等应用场景中,被测量对象往往是不规则的,导致体积的计算没有现成可以套用的公式。为计算不规则物体的面积和体积,目前一般是采用全站仪或全球定位系统(gps)观测物体特征点来计算物体的面积和体积,不过因其测量数据十分有限,使得不规则物体面积和体积的计算结果误差较大。
2、因此,现在迫切的需要研究一种新的不规则物体的面积和体积测量技术。
3、以上信息作为背景信息给出只是为了辅助理解本公开,并没有确定或者承认任意上述内容是否可用作相对于本公开的现有技术。
技术实现思路
1、本发明提供一种不规则物体的面积和体积测量方法、系统、设备和介质,以解决现有技术的不足。
2、为实现上述目的,本发明提供以下的技术方案:
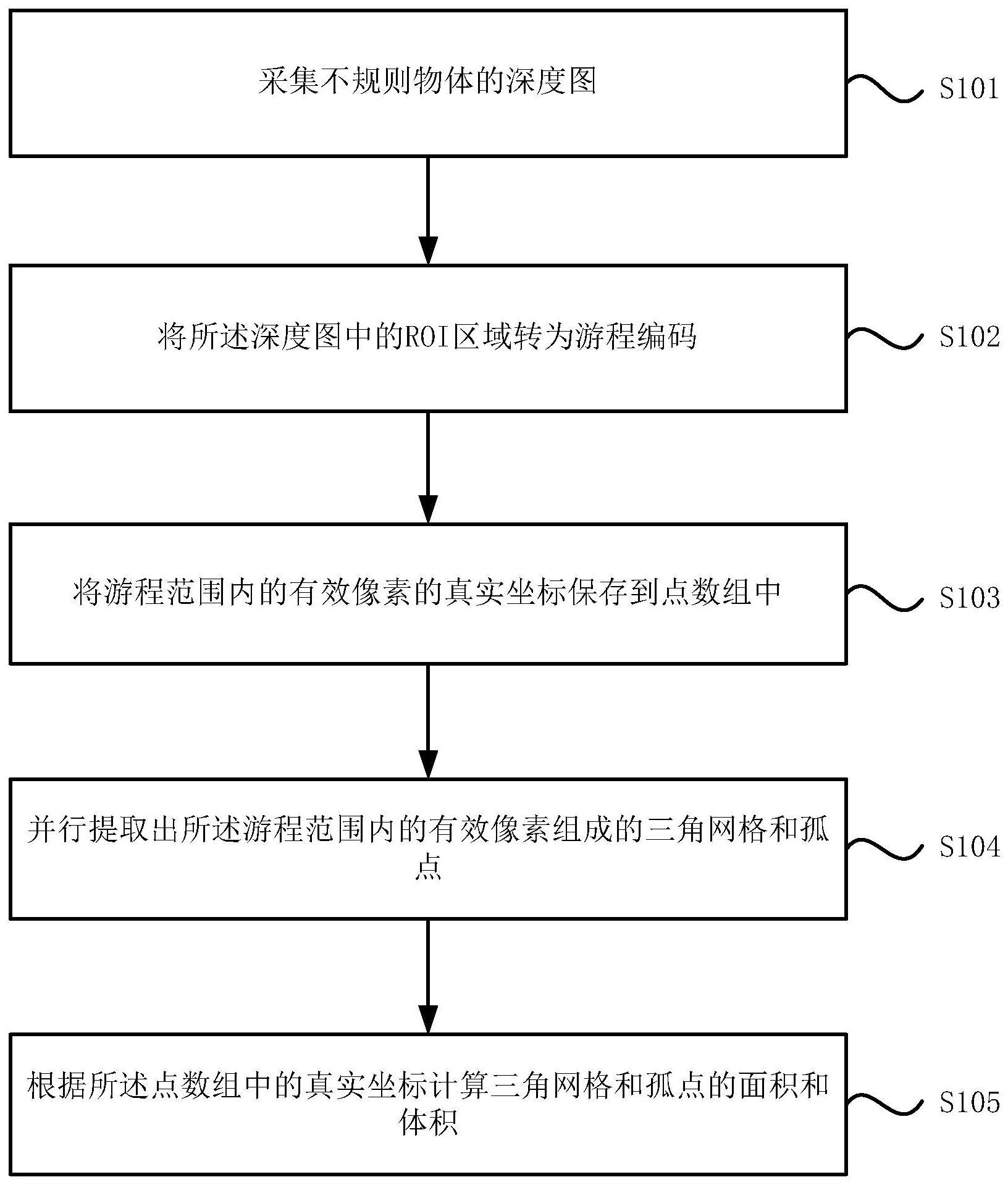
3、第一方面,本发明提供一种不规则物体的面积和体积测量方法,所述方法包括:
4、采集不规则物体的深度图;
5、将所述深度图中的roi区域转为游程编码;
6、将游程范围内的有效像素的真实坐标保存到点数组中;
7、并行提取出所述游程范围内的有效像素组成的三角网格和孤点;
8、根据所述点数组中的真实坐标计算三角网格和孤点的面积和体积。
9、进一步地,所述不规则物体的面积和体积测量方法中,所述将游程范围内的有效像素的真实坐标保存到点数组中的步骤包括:
10、按照以下公式计算游程范围内的有效像素的真实坐标:
11、真实坐标=(像素值-偏移)*分辨率;
12、将计算得到的真实坐标保存到点数组中。
13、进一步地,所述不规则物体的面积和体积测量方法中,所述并行提取出所述游程范围内的有效像素组成的三角网格和孤点的步骤包括:
14、将所述游程范围内四个相邻的像素定义为一个quad单元;
15、判断所述quad单元中四个相邻的像素是否皆为有效像素;
16、若是,则并行提取出四个相邻的有效像素组成的左上和右下两个三角网格;
17、若否,则并行提取出三个相邻的有效像素组成的一个三角网格,或者并行提取出两个有效像素组成的两个孤点,或者提取出一个有效像素组成的一个孤点。
18、进一步地,所述不规则物体的面积和体积测量方法中,在所述将所述游程范围内四个相邻的像素定义为一个quad单元的步骤之后,所述方法还包括:
19、判断是否存在由六个相邻的有效像素组成的左右quad单元;
20、若否,则直接执行所述判断所述quad单元中四个相邻的像素是否皆为有效像素的步骤;
21、若是,则从每个所述左右quad单元中位于左边的quad单元中提取出位于右下角的一个三角网格和位于左上角的一个孤点,以及从每个所述左右quad单元中位于右边的quad单元中提取出位于左上角的一个三角网格和位于右下角的一个孤点,再执行所述判断所述quad单元中四个相邻的像素是否皆为有效像素的步骤。
22、进一步地,所述不规则物体的面积和体积测量方法中,所述根据所述点数组中的真实坐标计算三角网格和孤点的面积和体积的步骤包括:
23、根据所述点数组中的真实坐标,按照以下公式分别计算三角网格的底面积s底、三角网格的上表面积s上、孤点的上表面积s孤、孤点的体积v孤以及三角网格的体积v体:
24、s底=xr×yr×0.5;
25、
26、,三角网格的三个有效像素的坐标按逆时针排列分别为(x1,y1,z1)、(x2,y2,z2)和(x3,y3,z3),v1x=x2-x1,v1y=y2-y1,v1z=z2-z1,v2x=x3-x1,v2x=y3-y1,v2z=z3-z1;
27、s孤=xr×yr×0.5;
28、v孤=xr×yr×z(i,j);
29、当三角网格的三个有效像素的坐标同号时,v体=vfed-abc=[(z1+z2+z3)/3]×xr×yr/2;
30、当三角网格的三个有效像素中一个有效像素的坐标和另外两个有效像素的的坐标异号,且两个坐标同号的有效像素a和c在斜边,一个坐标异号的有效像素i在直角边时,设a、c、i三点的z值分别为正、正、负,eg=ei/(aj+ei),ef=ei/(cd+ei),v凹=vefg-i=1/3×1/2×eg×ef×ei,vedj-ihk=1/2×ei,vdfgj-ihk=vedj-ihk-vefg-i,vac-ihk=1/3×1/2×[(ag+ei)+(cd+ei)],v凸=vac-djgf=vac-ihk-vdfgj-ihk;
31、当三角网格的三个有效像素中一个有效像素的坐标和另外两个有效像素的的坐标异号,且两个坐标同号的有效像素a和b在直角边,一个坐标异号的有效像素h在斜边时,设a、b、h三点的z值分别为正、正、负,df=dh/(be+dh),vedj-jhk=1/2×dh,vefgj-ihk=vedj-ihk-vdeg-h,vab-ihk=1/3×1/2[(be+dh)+(aj+dh)],v凸=vab-efgj=vab-ihk-vefgj-ihk;
32、其中,xr和yr为深度图x、y方向的分辨率,z(i,j)为第i行、第j列的z值,z1、z2、z3分别为三角网格的三个有效像素的z值。
33、第二方面,本发明提供一种不规则物体的面积和体积测量系统,所述系统包括:
34、图像采集模块,用于采集不规则物体的深度图;
35、roi转游程模块,用于将所述深度图中的roi区域转为游程编码;
36、坐标保存模块,用于将游程范围内的有效像素的真实坐标保存到点数组中;
37、网格孤点提取模块,用于并行提取出所述游程范围内的有效像素组成的三角网格和孤点;
38、面积体积计算模块,用于根据所述点数组中的真实坐标计算三角网格和孤点的面积和体积。
39、进一步地,所述不规则物体的面积和体积测量系统中,所述坐标保存模块具体用于:
40、按照以下公式计算游程范围内的有效像素的真实坐标:
41、真实坐标=(像素值-偏移)*分辨率;
42、将计算得到的真实坐标保存到点数组中。
43、进一步地,所述不规则物体的面积和体积测量系统中,所述网格孤点提取模块具体用于:
44、将所述游程范围内四个相邻的像素定义为一个quad单元;
45、判断所述quad单元中四个相邻的像素是否皆为有效像素;
46、若是,则并行提取出四个相邻的有效像素组成的左上和右下两个三角网格;
47、若否,则并行提取出三个相邻的有效像素组成的一个三角网格,或者并行提取出两个有效像素组成的两个孤点,或者提取出一个有效像素组成的一个孤点。
48、进一步地,所述不规则物体的面积和体积测量系统中,所述网格孤点提取模块在执行所述将所述游程范围内四个相邻的像素定义为一个quad单元的步骤之后,还具体用于:
49、判断是否存在由六个相邻的有效像素组成的左右quad单元;
50、若否,则直接执行所述判断所述quad单元中四个相邻的像素是否皆为有效像素的步骤;
51、若是,则从每个所述左右quad单元中位于左边的quad单元中提取出位于右下角的一个三角网格和位于左上角的一个孤点,以及从每个所述左右quad单元中位于右边的quad单元中提取出位于左上角的一个三角网格和位于右下角的一个孤点,再执行所述判断所述quad单元中四个相邻的像素是否皆为有效像素的步骤。
52、进一步地,所述不规则物体的面积和体积测量系统中,所述面积体积计算模块具体用于:
53、根据所述点数组中的真实坐标,按照以下公式分别计算三角网格的底面积s底、三角网格的上表面积s上、孤点的上表面积s孤、孤点的体积v孤以及三角网格的体积v体:
54、s底=xr×yr×0.5;
55、
56、,三角网格的三个有效像素的坐标按逆时针排列分别为(x1,y1,z1)、(x2,y2,z2)和(x3,y3,z3),v1x=x2-x1,v1y=y2-y1,v1z=z2-z1,v2x=x3-x1,v2x=y3-y1,v2z=z3-z1;
57、s孤=xr×yr×0.5;
58、v孤=xr×yr×z(i,j);
59、当三角网格的三个有效像素的坐标同号时,v体=vfed-abc=[(z1+z2+z3)/3]×xr×yr/2;
60、当三角网格的三个有效像素中一个有效像素的坐标和另外两个有效像素的的坐标异号,且两个坐标同号的有效像素a和c在斜边,一个坐标异号的有效像素i在直角边时,设a、c、i三点的z值分别为正、正、负,eg=ei/(aj+ei),ef=ei/(cd+ei),v凹=vefg-i=1/3×1/2×eg×ef×ei,vedj-ihk=1/2×ei,vdfgj-ihk=vedj-ihk-vefg-i,vac-ihk=1/3×1/2×[(ag+ei)+(cd+ei)],v凸=vac-djgf=vac-ihk-vdfgj-ihk;
61、当三角网格的三个有效像素中一个有效像素的坐标和另外两个有效像素的的坐标异号,且两个坐标同号的有效像素a和b在直角边,一个坐标异号的有效像素h在斜边时,设a、b、h三点的z值分别为正、正、负,df=dh/(be+dh),vedj-jhk=1/2×dh,vefgj-ihk=vedj-ihk-vdeg-h,vab-ihk=1/3×1/2[(be+dh)+(aj+dh)],v凸=vab-efgj=vab-ihk-vefgj-ihk;
62、其中,xr和yr为深度图x、y方向的分辨率,z(i,j)为第i行、第j列的z值,z1、z2、z3分别为三角网格的三个有效像素的z值。
63、第三方面,本发明提供一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现如上述第一方面所述的不规则物体的面积和体积测量方法。
64、第四方面,本发明提供一种包含计算机可执行指令的存储介质,所述计算机可执行指令由计算机处理器执行,以实现如上述第一方面所述的不规则物体的面积和体积测量方法。
65、与现有技术相比,本发明具有以下有益效果:
66、本发明提供的一种不规则物体的面积和体积测量方法、系统、设备和介质,通过以深度图为处理对象,并基于扫描线游程编码和三角网格来实现对不规则物体的面积和体积的测量,不仅计算结果精度高,而且计算效率高,同时消耗存储资源较少。
- 还没有人留言评论。精彩留言会获得点赞!