一种基于机器视觉技术的接触网槽道测量方法及装置与流程
本发明属于接触网槽道测量,尤其涉及一种基于机器视觉技术的接触网槽道测量方法及装置。
背景技术:
1、接触网槽道是一种预埋在隧道混凝土内壁中的金属器件,通常一处预埋点预埋2根槽道金具,高速铁路接触网吊臂即通过槽道固定安装于隧道顶部,因相对精度要求高且槽道均处于隧道顶高净空处,人工登高测量检验效率低且危险性大,因为机器视觉测量技术具有非接触式测量的特点,所以适合应用于接触网槽道测量。但现有机器视觉测量设备主要应用于流水线下稳定工作环境,被测物与摄像头间距离几乎不变,流水线启动前手动调整一次焦距即可满足之后所有工作需求,并且流水线作业强调质量、精度和稳定性,而自动对焦镜头相比手动定焦镜头结构复杂,会带来更多的畸变和不稳定性,因此现有机器视觉测量装置均不支持自动对焦。但隧道内复杂的作业环境要求测量装置可快速自动对焦,因此亟需一种能够解决现有机器视觉测量装置无法在隧道内无法完成快速自动对焦的方法。
技术实现思路
1、有鉴于此,本发明提供了一种基于机器视觉技术的接触网槽道测量方法及装置,以解决在隧道内测量接触网槽道时,现有机器视觉测量装置无法完成快速自动对焦导致测量精度低的问题。
2、本发明的第一方面提供了一种基于机器视觉技术的接触网槽道测量方法,包括:
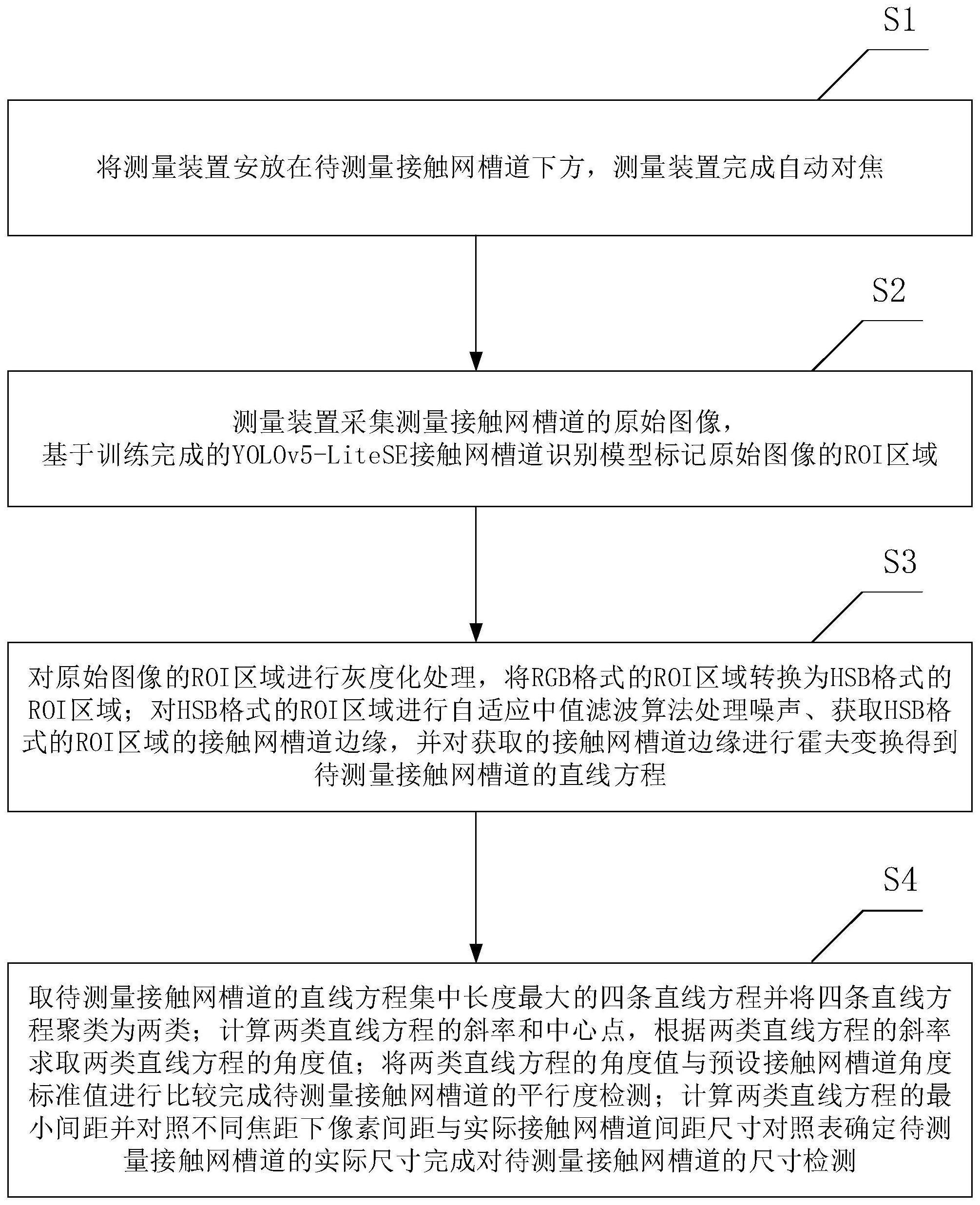
3、s1:将测量装置安放在待测量接触网槽道下方,测量装置完成自动对焦;
4、s2:测量装置采集测量接触网槽道的原始图像,基于训练完成的yolov5-litese接触网槽道识别模型标记原始图像的roi区域;
5、s3:对原始图像的roi区域进行灰度化处理,将rgb格式的roi区域转换为hsb格式的roi区域;对hsb格式的roi区域进行自适应中值滤波算法处理噪声、获取hsb格式的roi区域的接触网槽道边缘,并对获取的接触网槽道边缘进行霍夫变换得到待测量接触网槽道的直线方程;
6、s4:取待测量接触网槽道的直线方程集中长度最大的四条直线方程并将四条直线方程聚类为两类;计算两类直线方程的斜率和中心点,根据两类直线方程的斜率求取两类直线方程的角度值;将两类直线方程的角度值与预设接触网槽道角度标准值进行比较完成待测量接触网槽道的平行度检测;计算两类直线方程的最小间距并对照不同焦距下像素间距与实际接触网槽道间距尺寸对照表确定待测量接触网槽道的实际尺寸完成对待测量接触网槽道的尺寸检测。
7、可选的,所述将测量装置安放在待测量接触网槽道下方,测量装置完成自动对焦包括:
8、s11:将测量装置安放在待测量接触网槽道下方,参照测量装置上气泡水平仪将测量装置调平,测量装置采集待测量接触网槽道的测试图像;
9、s12:数据终端获取测试图像,计算测试图像的像素灰度平均值,将像素灰度平均值与像素灰度最佳区间进行比较,当像素灰度平均值小于像素预设最佳下限时,测量装置增强照明亮度,并重新执行步骤s11;当像素灰度平均值大于像素预设最佳上限时,测量装置降低照明亮度,并重新执行步骤s11;
10、s13:图像亮度调节完成后,首先测量装置使用爬山法依次采集焦距从最小值至最大值的图像集,其次测量装置基于改进的tenengrad清晰度评价算法计算测试图像的边缘清晰度,选择边缘清晰度最高的图像焦距对测量装置进行自动对焦。
11、可选的,所述测量装置基于改进的tenengrad清晰度评价算法计算测试图像的边缘清晰度包括:
12、在测试图像中引入sobel算子计算获得测试图像的一阶梯度,sobel算子分别提取0°、45°、90°、135°四个方向上的边缘梯度,以检测更多方向的边缘,改进的tenengrad清晰度评价算法的计算公式包括:
13、s1=f(x-1,y+1)+f(x+1,y+1)+2f(x,y+1)-f(x-1,y-1)-f(x+1,y-1)-2f(x,y-1)
14、s2=f(x,y+1)+f(x+1,y)+2f(x+1,y+1)-f(x-1,y)-f(x,y-1)-2f(x-1,y-1)
15、s3=f(x-1,y+1)+f(x+1,y+1)+2f(x,y+1)-f(x-1,y-1)-f(x+1,y-1)-2f(x,y-1)
16、s4=f(x-1,y)+f(x,y+1)+2f(x-1,y+1)-f(x,y-1)-f(x+1,y)-2f(x+1,y-1)
17、
18、其中,f(x,y)为像素点(x,y)的像素值,e(x,y)为像素点(x,y)的边缘梯度值;
19、将测试图像灰度的标准差作为阈值,构建测试图像的边缘清晰度评价函数为:
20、e=∑x∑ye(x,y),f(x,y)>t
21、e为测试图像的边缘清晰度评价值,t为测试图像灰度的标准差。
22、可选的,所述yolov5-litese接触网槽道识别模型的训练步骤包括:
23、首先,向竣工资料部门收集施工现场预埋接触网槽道照片并进行整理、压缩以及变换预处理,导出yolov5-litese所用格式的预埋接触网槽道图片组成训练数据集;
24、其次,利用v5lite-s.pt文件中提取训练权重,训练参数个数batch_size设定为32,迭代周期epochs设定为200,置信阈值设定为0.45,iou阈值设定为0.65,yolov5-litese使用warmup预热学习率方式进行训练,得到训练完成的yolov5-litese接触网槽道识别模型。
25、可选的,所述对原始图像的roi区域进行灰度化处理,将rgb格式的roi区域转换为hsb格式的roi区域包括:
26、rgb格式的roi区域转换为hsb格式的roi区域的中各个像素点的转换算法为:
27、
28、h为各个像素点转换后的像素值;
29、所述对hsb格式的roi区域进行自适应中值滤波算法处理噪声包括:
30、zmin=sxy中的最小灰度值,zmax=sxy中的最大灰度值;
31、zmed=sxy中的灰度值的中值,smax=sxy允许的最大窗口尺寸;
32、处理过程a:
33、a1=zmed-zmin,a2=zmed-zmax
34、如果a1大于0且a2小于0,执行处理过程b,否则增大窗口的尺寸;如果增大后窗口的尺寸不大于smax,则返回执行处理过程a,否则,输出zmed;
35、处理过程b:
36、b1=zxy-zmin,b2=zxy-zmax
37、如果b1大于0且b2小于0,则输出zxy,否则输出zmed;
38、其中,zxy表示坐标(x,y)处的灰度值。
39、可选的,所述获取hsb格式的roi区域的接触网槽道边缘,并对获取的接触网槽道边缘进行霍夫变换得到待测量接触网槽道的直线方程包括:
40、利用sobel算子分别提取hsb格式的roi区域0°、45°、90°、135°四个方向上的边缘梯度,并转化为笛卡尔直角坐标系上的n个坐标点,分别为:
41、(x0,y0)(x1,y1)……(xn-1,yn-1)
42、对n个坐标点进行霍夫变换得到hsb格式的roi区域的直线方程,即接触网槽道边缘:
43、y0=kx0+b,y1=kx1+b……yn-1=kxn-1+b
44、其中,k为直线斜率,b为直线截距;
45、在隧道混凝土穹顶中提取的接触网槽道边缘获得8条直线,分别为待测量接触网槽道的4条长边和4条短边。
46、可选的,所述计算两类直线方程的最小间距包括:
47、线段l1的直线向量方程为:p(λ1)=p1+λ1s1,线段l2的直线向量方程为:q(λ2)=q1+λ2s2;
48、其中,p1和p2为线段l1的两端点,线段l1的方向向量s1=p2-p1;q1和q2为线段l2的两端点,线段l2的方向向量s2=q2-q1;变量λ1和变量λ2的取值范围是:0≤λ1,λ2≤1;
49、将线段l1和线段l2的最小间距转化为有约束的最优化问题:
50、minf(λ1,λ2)=||p(λ1)-q(λ2)||2=||(p1+λ1s1)-(q1+λ2s2)||2
51、s.t.0≤λ1,λ2≤1
52、由极小值条件:可得:
53、
54、若0≤λ1,λ2≤1,则d2min=f(λ1,λ2),反之分别求端点p1到线段l2的最短距离d1、端点p2到线段l2的最短距离d2、端点q1到线段l1的最短距离d3、端点q2到线段l1的最短距离d4,可得两线段间的最短距离dmin=min{d1,d2,d3,d4}。
55、本发明的第二方面提供了一种基于机器视觉技术的接触网槽道测量装置,包括测量装置自动对焦模块、接触网槽道图像获取模块、接触网槽道图像预处理模块以及接触网槽道图像检测模块;
56、测量装置自动对焦模块,用于将测量装置安放在待测量接触网槽道下方,测量装置完成自动对焦;
57、接触网槽道图像获取模块,用于测量装置采集测量接触网槽道的原始图像,基于训练完成的yolov5-litese接触网槽道识别模型标记原始图像的roi区域;
58、接触网槽道图像预处理模块,用于对原始图像的roi区域进行灰度化处理,将rgb格式的roi区域转换为hsb格式的roi区域;对hsb格式的roi区域进行自适应中值滤波算法处理噪声、获取hsb格式的roi区域的接触网槽道边缘,并对获取的接触网槽道边缘进行霍夫变换得到待测量接触网槽道的直线方程;
59、接触网槽道图像检测模块,用于取待测量接触网槽道的直线方程集中长度最大的四条直线方程并将四条直线方程聚类为两类;计算两类直线方程的斜率和中心点,根据两类直线方程的斜率求取两类直线方程的角度值;将两类直线方程的角度值与预设接触网槽道角度标准值进行比较完成待测量接触网槽道的平行度检测;计算两类直线方程的最小间距并对照不同焦距下像素间距与实际接触网槽道间距尺寸对照表确定待测量接触网槽道的实际尺寸完成对待测量接触网槽道的尺寸检测。
60、可选的,所述测量装置自动对焦模块用于执行以下步骤:
61、s11:将测量装置安放在待测量接触网槽道下方,参照测量装置上气泡水平仪将测量装置调平,测量装置采集待测量接触网槽道的测试图像;
62、s12:数据终端获取测试图像,计算测试图像的像素灰度平均值,将像素灰度平均值与像素灰度最佳区间进行比较,当像素灰度平均值小于像素预设最佳下限时,测量装置增强照明亮度,并重新执行步骤s11;当像素灰度平均值大于像素预设最佳上限时,测量装置降低照明亮度,并重新执行步骤s11;
63、s13:图像亮度调节完成后,首先测量装置使用爬山法依次采集焦距从最小值至最大值的图像集,其次测量装置基于改进的tenengrad清晰度评价算法计算测试图像的边缘清晰度,选择边缘清晰度最高的图像焦距对测量装置进行自动对焦。
64、本发明与现有技术相比存在的有益效果是:
65、本发明提供了一种基于机器视觉技术的接触网槽道测量方法及装置,包括:s1:将测量装置安放在待测量接触网槽道下方,测量装置完成自动对焦;s2:测量装置采集测量接触网槽道的原始图像,基于训练完成的yolov5-litese接触网槽道识别模型标记原始图像的roi区域;s3:对原始图像的roi区域进行灰度化处理,将rgb格式的roi区域转换为hsb格式的roi区域;对hsb格式的roi区域进行自适应中值滤波算法处理噪声、获取hsb格式的roi区域的接触网槽道边缘,并对获取的接触网槽道边缘进行霍夫变换得到待测量接触网槽道的直线方程;s4:取待测量接触网槽道的直线方程集中长度最大的四条直线方程并将四条直线方程聚类为两类;计算两类直线方程的斜率和中心点,根据两类直线方程的斜率求取两类直线方程的角度值;将两类直线方程的角度值与预设接触网槽道角度标准值进行比较完成待测量接触网槽道的平行度检测;计算两类直线方程的最小间距并对照不同焦距下像素间距与实际接触网槽道间距尺寸对照表确定待测量接触网槽道的实际尺寸完成对待测量接触网槽道的尺寸检测。本发明能解决在隧道内测量接触网槽道时,现有机器视觉测量装置无法完成快速自动对焦导致测量精度低的问题。
- 还没有人留言评论。精彩留言会获得点赞!