一种多数量仓储无人车智能调度方法及装置与流程
本发明涉及智能物流,尤其是一种多数量仓储无人车智能调度方法及装置。
背景技术:
1、名词解释:
2、a*:(a-star)算法是一种静态路网中求解最短路径最有效的直接搜索方法,也是许多其他问题的常用启发式算法。
3、aco:蚁群算法(ant colony algorithm,aco),是一种群智能算法,它是由一群无智能或有轻微智能的个体(agent)通过相互协作而表现出智能行为,从而为求解复杂问题提供了一个新的可能性。
4、teb:timed-elastic-band从给定路径中得到一系列带时间信息的离散位姿(pose),通过图优化的方法将这些离散位姿组成满足时间最短、距离最短和远离障碍物等目标的轨迹,同时满足机器人运动动力学的约束。需要注意的是,优化得到的轨迹并不一定满足所有约束,即给定的约束条件实际上都是软约束条件。
5、无人车调度技术主要分为启发式与非启发式两种,其中非启发式表示其对于问题求解有明确的多项式,使用复杂多项式的求解技术来进行无人车调度方案的求解。但随着生产任务的增加,仓储环境内无人车的台数也在逐步增多,此时使用复杂多项式求解的技术也无法求得最优解。因此,非启发式算发仅适用于单个无人车或小规模无人车的调度工作,使用场景少。
6、启发式算法是一个基于直观或经验构造的算法,在指定的空间下给出待解决问的组合优化问题的每一个实例的一个可行解,该可行解与最优解的偏离程度一般不能被估计。因此使用启发式算法技术求解无人车调度问题的能力显著提高。
7、启发式算法又分为传统启发式和新式启发式算法两类,其中,新式启发式算法是目前无人车调度问题应用较为广泛的算法,特别是蚁群算法(ant colony algorithm,aco)。但是,蚁群算法在初期会因为信息素缺乏,导致算法前期计算时间长,且积累过程较久。同时蚁群算法作为启发式算法,其参数设置没有合理的数学解释,主要依靠经验与调试。此外,蚁群算法的时间效率不高,对于规模较大的问题其前期搜索时间过长。为改善这些缺点,蚁群算法可与其他全局搜索性好且前期不易早熟的启发算法进行融合来发挥其优点。而a*算法是在起始位置到终点位置中全局求解最短路径的有效方法,且求解精度很高,但实时性偏低,每一节点计算量大、运算时间长,且在无人车运送货物的运动过程中,要考虑无人车的实际情况,防止无人车因为遇到障碍物而加大一定量的计算。
技术实现思路
1、有鉴于此,本发明实施例提供一种适用场景广、效率高的多数量仓储无人车智能调度方法及装置,以优化无人车的路径规划结果。
2、本发明实施例的一方面提供了一种多数量仓储无人车智能调度方法,包括:
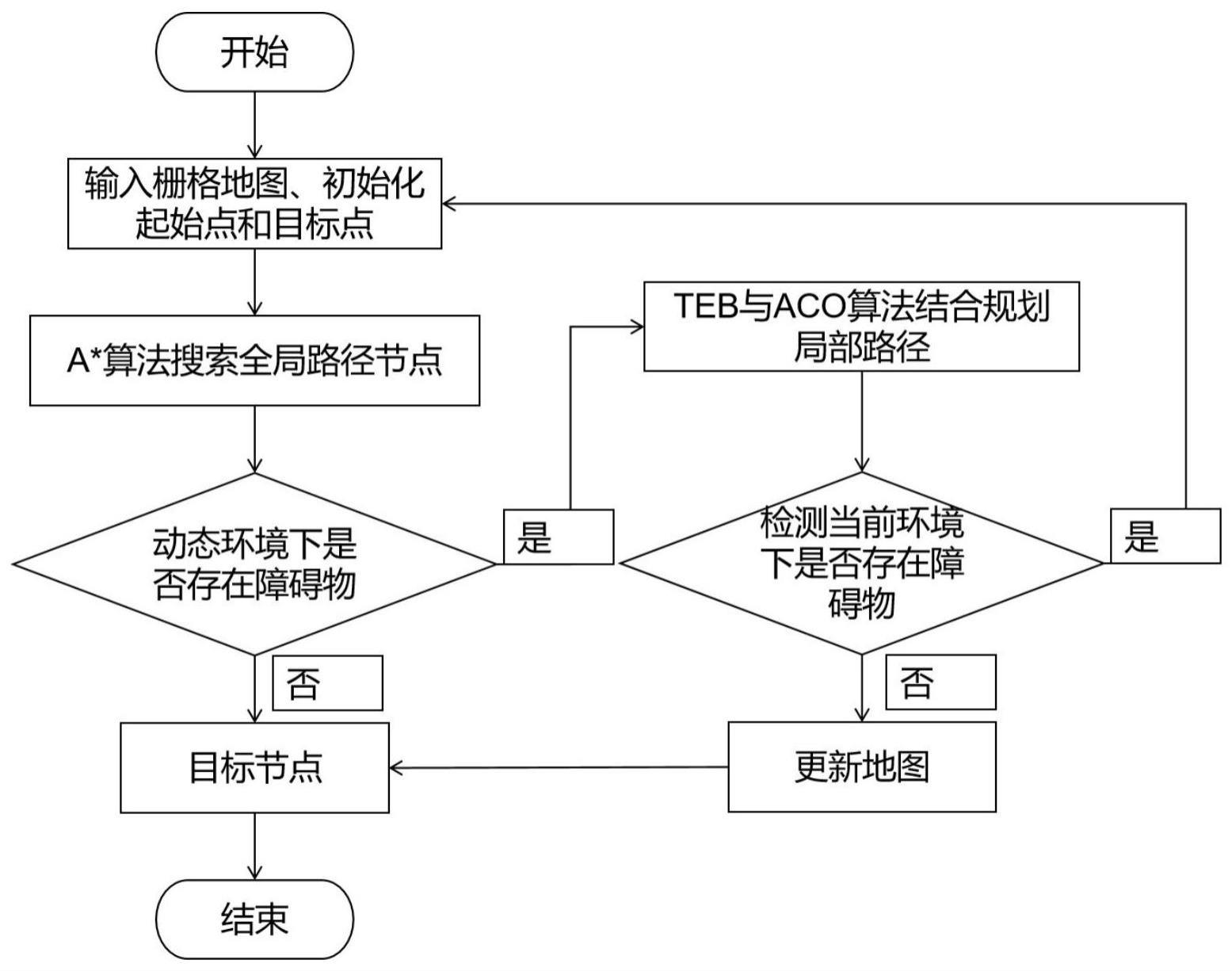
3、获取栅格地图,对无人车的起始点、目标终点和初始速度进行初始化配置,创建初始条件;
4、根据所述初始条件,通过a-star算法进行全局路径规划,确定全局路径节点;
5、当动态环境中存在障碍物时,通过teb算法以及aco算法进行局部路径规划,对所述全局路径节点进行更新,并把动态障碍物转换为静态带障碍物的栅格地图;
6、根据更新后的全局路径节点,通过所述a-star算法再次进行全局路径规划,确定全局路径节点以及得到新的路径规划图,直到新的路径规划图中不存在动态障碍物;
7、根据最终的路径规划图完成对无人车的智能调度。
8、可选地,所述方法还包括:
9、收集无人车所处的当前环境下的无人车数量以及无人车所在的静态位置;
10、根据所述无人车数量和各个无人车的静态位置,确定目标无人车与其他无人车之间的安全距离;
11、对目标无人车所处的当前环境的环境图像进行图像识别,识别出所述环境图像中包含的每个障碍物的类别信息;
12、以所述目标无人车所在的地点为原点,根据每个左右邻居的无人车和障碍物位置,在待构建的环境地图中添加像素位置,并计算每个无人车与其他无人车以及障碍物之间的距离信息;
13、将无人车和障碍物的像素位置转换到目标坐标系内,生成当前环境的环境地图。
14、可选地,所述根据所述初始条件,通过a-star算法进行全局路径规划,确定全局路径节点,包括:
15、将全局路径节点的起始点放到开始队列中,在所述起始点周围查找能够通过的方格,并将方格加入到所述开始队列中,设置所述起始点为新加入方格的父节点并用箭头标注后,将所述起始点中开始队列移入到结束队列;
16、从所述开始队列中依次选择综合优先级最小的节点,并将该综合优先级最小的节点放入所述结束队列,直到综合优先级最小的节点为目标终点为止;
17、根据所述目标终点方向以及箭头标注,反向寻路找到所述起始点,形成一条当前栅格地图中的最短路径。
18、可选地,所述根据所述初始条件,通过a-star算法进行全局路径规划,确定全局路径节点这一步骤中,每个节点的优先级的计算公式为:
19、f(n)=g(n)+h(n)
20、其中,f(n)是节点n的综合优先级;g(n)是节点n距离起点的代价;h(n)是节点n距离终点的预计代价。
21、可选地,所述通过teb算法以及aco算法进行局部路径规划这一步骤中,所述aco算法的局部路径规划包括:
22、对所述a-star算法输出的当前栅格地图中的最短路径进行赋值;
23、为每辆无人车配置下一节点后,更新信息素矩阵;
24、根据所述信息素矩阵判断是否满足终止条件,当满足终止条件时,输出最优局部路径。
25、本发明实施例的另一方面还提供了一种多数量仓储无人车智能调度装置,包括:
26、第一模块,用于获取栅格地图,对无人车的起始点、目标终点和初始速度进行初始化配置,创建初始条件;
27、第二模块,用于根据所述初始条件,通过a-star算法进行全局路径规划,确定全局路径节点;
28、第三模块,用于当动态环境中存在障碍物时,通过teb算法以及aco算法进行局部路径规划,对所述全局路径节点进行更新,并把动态障碍物转换为静态带障碍物的栅格地图;
29、第四模块,用于根据更新后的全局路径节点,通过所述a-star算法再次进行全局路径规划,确定全局路径节点以及得到新的路径规划图,直到新的路径规划图中不存在动态障碍物;
30、第五模块,用于根据最终的路径规划图完成对无人车的智能调度。
31、可选地,所述第二模块中根据所述初始条件,通过a-star算法进行全局路径规划,确定全局路径节点这一步骤中,每个节点的优先级的计算公式为:
32、f(n)=g(n)+h(n)
33、其中,f(n)是节点n的综合优先级;g(n)是节点n距离起点的代价;h(n)是节点n距离终点的预计代价。
34、本发明实施例的另一方面还提供了一种电子设备,包括处理器以及存储器;
35、所述存储器用于存储程序;
36、所述处理器执行所述程序实现如前面所述的方法。
37、本发明实施例的另一方面还提供了一种计算机可读存储介质,所述存储介质存储有程序,
38、所述程序被处理器执行实现如前面所述的方法。
39、本发明实施例还公开了一种计算机程序产品或计算机程序,该计算机程序产品或计算机程序包括计算机指令,该计算机指令存储在计算机可读存储介质中。计算机设备的处理器可以从计算机可读存储介质读取该计算机指令,处理器执行该计算机指令,使得该计算机设备执行前面的方法。
40、本发明的实施例获取栅格地图,对无人车的起始点、目标终点和初始速度进行初始化配置,创建初始条件;根据所述初始条件,通过a-star算法进行全局路径规划,确定全局路径节点;当动态环境中存在障碍物时,通过teb算法以及aco算法进行局部路径规划,对所述全局路径节点进行更新,并把动态障碍物转换为静态带障碍物的栅格地图;根据更新后的全局路径节点,通过所述a-star算法再次进行全局路径规划,确定全局路径节点以及得到新的路径规划图,直到新的路径规划图中不存在动态障碍物;根据最终的路径规划图完成对无人车的智能调度。本发明通过将a-star算法、teb算法以及aco算法组合应用在无人车智能调度的路径规划过程中,改进了信息素浓度的初始化问题,使得调度方案在全局最优的方案下,也可做到局部路径修正工作,可实时避开动态障碍物,本发明的耗时短、路径平滑,能够实时躲避动态障碍物,有效地避免陷入局部最优解的问题,使得路径规划结果的适用场景广、效率高。
- 还没有人留言评论。精彩留言会获得点赞!