基于路侧感知系统的无人机自适应充电调度系统及方法与流程
:本发明属于车联网、无人机充电领域,具体涉及一种基于路侧感知系统的无人机自适应充电调度系统及方法。
背景技术
0、
背景技术:
1、近年来,无人机技术蓬勃发展,不仅在摄影视频录制领域大放异彩,在公共安全、无线通信、应急救灾领域也发挥着越来越重要的作用。
2、在车联网中,车路协同是其中重要的一环。车路协同采用先进的无线通信和新一代互联网等技术,全方位实施车车、车路动态实时信息交互,并在全时空动态交通信息采集与融合的基础上开展车辆主动安全控制和道路协同管理,充分实现人车路的有效协同,保证交通安全,提高通行效率,从而形成的安全、高效和环保的道路交通系统。
3、路侧感知系统(roadsidesensingsystem,rss)是支撑网联自动驾驶,提升交通运行效率、缓解拥堵的重要手段。通过rss系统为自动驾驶汽车提供超视距感知、盲区预警、驾驶意图等信息,是弥补单车自动驾驶感知局限的重要技术手段之一。在车路协同应用中,路侧感知系统能够实现全局目标的实时矢量化和跟踪,具有重要的作用。
4、由于车联网路侧感知系统成本较大,过于密集布置对于产业投入过大,为弥补车联网路侧固定感知系统的感知范围缺陷,可以基于不同的时空需求,引入无人机进行动态感知。然而由于无人机体积及重量限制,导致其电池容量有限,进而导致续航时间有限,无法长时间执行任务,因此需要进行定期充电。当前无人机充电技术主要包括磁场耦合式、电场耦合式和电磁辐射式等技术,无人机充电调度系统当前有水上平台的充电调度系统、基于路灯的充电调度系统、车载充电调度系统等多种形式,但上述系统均无法满足无人机执行远距离任务时的续航需求。
5、基于以上背景,亟需设计一套面向车联网基于地空一体化路侧感知系统的无人机充电设计方案及自适应充电调度方法。对未来无人机在各个领域执行值守任务,拓展无人机执行任务的范围、提升系统的智能化水平具有重要意义。
技术实现思路
1、为解决上述问题,本发明的首要目的在于提供一种基于路侧感知系统的无人机自适应充电调度系统及方法,通过搭配无人机,形成基于地空一体化路侧感知系统,能够对当前道路的车辆、非机动车、行人、障碍物等交通参与者与影响要素进行感知和准确识别,并能够将相关信息发送至数据需求方;
2、本发明的另一个目的在于提供一种基于路侧感知系统的无人机自适应充电调度系统及方法,能够实现无人机任务分配功能及任务预测功能;
3、本发明的再一个目的在于提供一种基于路侧感知系统的无人机自适应充电调度系统及方法,形成一套面向车联网基于地空一体化路侧感知系统的无人机充电设计方案及自适应充电调度方法,弥补了当前面向车联网地空一体化路侧感知无人机充电调度系统及自适应充电调度方法的空白。
4、为实现上述目的,本发明的技术方案如下:
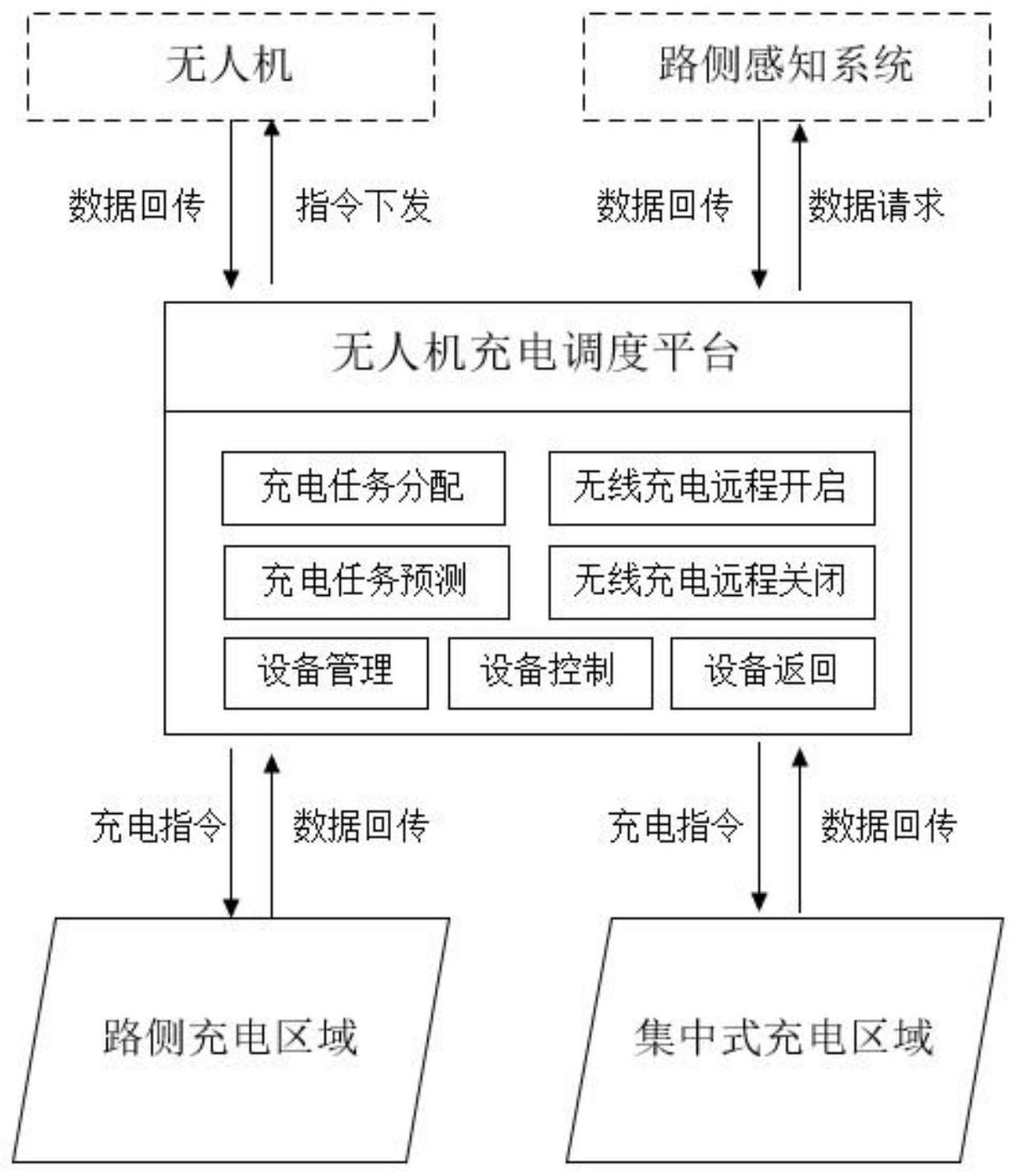
5、提供一种基于路侧感知系统的无人机自适应充电调度系统,该系统包括有:无人机充电调度平台、集中式充电区域、路侧充电区域,所述集中式充电区域、路侧充电区域均与无人机充电调度平台交互。在本技术中,无人机是本系统控制的设备对象,路侧感知系统的数据支撑无人机充电调度平台进行决策,两者是无人机充电调度系统的功能实现前提,但并不属于无人机充电调度系统的一部分。具体为:无人机充电调度平台与路侧感知系统使用蜂窝网络通信,无人机在执行充电任务分配、充电任务预测等功能时,不仅需要无人机设备数据进行支撑,同样需要路侧感知系统观测到的各个路口实时动态信息进行输入,进而决策相关内容。
6、进一步地,所述无人机充电调度平台用于对无人机充电调度系统进行控制,包括设备管理模块、充电任务分配模块、设备控制模块、无线充电远程开启模块、无线充电远程关闭模块、充电任务预测模块、设备返回模块。
7、设备管理模块:用于对无人机进行编号,以及对厂商、当前执行任务状态、当前位置、当前电量等信息进行管理和维护。
8、充电任务分配:为无人机分配充电任务。当无人机电量低于设定应充电电量后,向无人机充电调度平台请求充电。无人机充电调度平台对未来任务进行预测,若无人机无需执行未来任务,且电量满足返回集中式充电区域,则对设备进行返回集中式充电区域指令。待无人机到达集中式充电区域后,向充电任务平台发送当前状态,充电任务平台为无人机分配充电位,或要求无人机落地等待。当无人机电量不满足返回集中式充电区域时,为无人机分配最近可用的路侧充电区域。
9、设备控制:用于对无人机进行文件下发、数据采集、路线制定等设备控制功能,能够支撑无人机顺利执行充电及返回等任务。
10、无线充电远程开启:用于开启无人机充电位。本技术的无人机充电位使用电磁感应式无线充电技术。当充电位没有无人机时,充电位关闭充电功能,当压力传感器感受到无人机降落后,摄像头识别功能开启,对无人机编号进行识别,向无人机充电调度平台请求当前无人机电量及需求。无人机充电调度平台向无人机发送数据上传请求。根据无人机当前电量情况,以及未来任务预测,无人机充电调度平台设定充电功率及时间。无人机充电调度平台将充电信息发送给充电位,充电位开始充电。
11、无线充电远程关闭:用于关闭无人机充电位。当充电时间达到设定时间后向无人机充电调度平台请求结束充电,无人机充电调度平台向无人机请求获取当前电量数据,电量超过预设百分比后,向充电位发送结束充电指令,充电位结束充电。若电量仍未达到预设要求,则发送继续充电指令。
12、充电任务预测:根据已有的历史交通数据和充电数据,基于机器学习的方法,对不同点位的无人机充电需求进行预测,进而支撑合理分配充电位置。
13、设备返回:对于路侧充电位的无人机,若存在任务,则下发继续执行任务指令,否则下发返回集中式充电区域指令,到达集中式充电区域后评估是否达到预设充电值。对于集中充电区域完成充电的无人机,下发返回停放仓库的指令。
14、进一步地,集中式充电区域为大面积的充电场地平台,包括大量充电位置,可满足大量无人机停放及充电功能。场地上方有遮阳屋顶,可满足遮阳、遮挡雨雪等建议环境需求。集中式充电区域为不执行任务的无人机进行常规充电,每个充电位可以单独执行充电,可与无人机充电调度平台进行实时数据交互。
15、进一步地,路侧充电区域的高度至少为4米,包括有1个以上的充电位与等待充电停放位。路侧充电区域可为无人机进行充电,对不执行悬空感知的无人机可进行实时充电,即无人机在充电位上可执行感知任务。等待充电停放位可停放等待充电的无人机。路侧充电区域充电位可与无人机充电调度平台进行实时数据交互。
16、本技术还提供一种基于路侧感知系统的无人机自适应充电调度方法,该充电调度方法包括以下步骤:
17、s1:无人机向无人机充电调度平台发送充电请求;
18、s2:无人机充电调度平台接收无人机回传的数据,判断无人机是否有后续任务;如果是,则分配路侧充电位进行充电;如果否,则进入s3;
19、s3:无人机充电调度平台判断无人机电量是否足够返回集中充电领域,如果否,则分配到路路侧充电位进行充电;如果是,则进入s4;
20、s4:返回集中充电领域,分配充电位,设置充电功率及时间,开启充电位,开始充电;
21、s5:判断是否达到充电设定时间,如果否,则返回到步骤s4在原充电位继续充电;如果是,则进入s6;
22、s6:判断是否达到设定充电值,如果否,则返回到步骤s4在原充电位继续充电;如果是,则结束充电,关闭充电位,进入s7。
23、s7:判断是否有后续任务,如果是,则执行后续任务;如果否,则进入s8;
24、s8:判断是否距离停放仓库较远,如果否,则返回停放仓库;如果是,则进入s9;
25、s9:返回集中充电领域,然后判断是否需要充电,如果否,则返回停放仓库;如果是,则返回到s4,重新分配充电位,进行充电。
26、进一步地,步骤s2中,分配到路侧充电位后,判断路侧充电位是否有其他无人机充电,如果是,则停放在位等待分配路侧充电位;如果否,则设置充电功率和时间,开启路侧充电位,开始充电,然后进入步骤s5-s9。
27、进一步地,步骤s2中,无人机充电调度平台接收无人机回传的数据是通过其内部的设备控制模块实现的。
28、进一步地,开启充电位与路侧充电位是通过无人机充电调度平台内部的无线充电远程开启模块实现的,关闭充电位是通过无人机充电调度平台内部的无线充电远程关闭模块实现的。
29、进一步地,步骤s7中,判断是否有后续任务是通过无人机充电调度平台内部的设备返回模块实现的。
30、进一步地,判断是否达到充电设定时间以及是否达到设定充电值是通过无人机充电调度平台内部的设备返回模块实现的。
31、进一步地,步骤s9中,判断是否需要充电是通过无人机充电调度平台内部的充电任务分配模块实现的。
32、相比于现有技术,本发明的有益效果是:
33、首先,通过搭配无人机,形成基于地空一体化路侧感知系统,能够对当前道路的车辆、非机动车、行人、障碍物等交通参与者与影响要素进行感知和准确识别,并能够将相关信息发送至数据需求方;
34、其次,能够实现无人机任务分配功能及任务预测功能;
35、最后,形成一套面向车联网基于地空一体化路侧感知系统的无人机充电设计方案及自适应充电调度方法,弥补了当前面向车联网地空一体化路侧感知无人机充电调度系统及自适应充电调度方法的空白。
- 还没有人留言评论。精彩留言会获得点赞!