触控板、振动马达和电子设备的制作方法
1.本技术涉及电子技术领域,并且更为具体地,涉及一种触控板、振动马达和电子设备。
背景技术:
2.随着时代的发展,在各种用户终端,例如:电脑,平板和手机等终端设备中均配置有触控板,其该触控板中可设置有振动马达,该振动马达能够在用户对终端设备的使用和按压中实现触觉反馈,提升用户对于终端设备的使用体验。
3.振动马达目前市面上主要采用的是线性马达方案,线性马达主要由线圈,和电磁铁等组成,结构比较复杂,整体体积较大且生产成本较贵。而另一种压电马达则具有振动位移量小、振幅强度低等问题,难以向用户提供振感明显的触觉反馈。鉴于此,如何提供一种振感反馈明显的触控板以提升用户的使用体验,是一项亟待解决的技术问题。
技术实现要素:
4.本技术提供了一种触控板、振动马达和电子设备,该触控板能够向用户提供振感明显的触觉反馈以提升用户的使用体验。
5.第一方面,提供一种触控板,包括:盖板,具有朝向用户的触摸界面,该触摸界面用于接收用户的触摸;电路板,设置于盖板下方,电路板上设置有触摸感应电极,用于感应用户在盖板上的触摸;压力检测装置,设置于电路板下方,用于检测用户在盖板上施加的压力;振动马达,设置于电路板下方,用于根据用户在盖板上施加的压力产生振动,以向触摸于用户提供振动的触觉反馈;其中,振动马达包括:杠杆;压电振动器,位于杠杆的动力输入端,用于接收指示用户在盖板上施加的压力大小的电信号以产生振动,压电振动器与杠杆的支点之间的距离为第一距离;振子,位于杠杆的动力输出端,振子与杠杆的支点之间的距离为第二距离,其中,第二距离大于第一距离,杠杆用于将压电振动器的振动位移放大,以使得振子以放大后的振动位移振动并向用户提供振动的触觉反馈。
6.在本技术实施例的技术方案中,提供了一种触控板,该触控板包括触摸感应电极以及压力检测装置,可以同时实现用户在盖板的触摸检测以及压力检测,与此同时,该触控板还包括振动马达,该振动马达可根据用户在盖板上施加的压力产生振动,以向用户提供振动的触觉反馈,因此,该触控板可以实现多种功能以提升用户的使用体验。进一步地,在该触控板中,利用杠杆、压电振动器以及振子构建得到振动马达,该振动马达可以兼具压电振动器低成本、体积小、振动频率高等优点。与此同时,该振动马达可以利用杠杆对压电振动器的振动位移等相关参数进行放大,以使得振子具有较大的振动位移,通过该振子向触控板外部传递振动,可以使得按压于触控板的用户具有振感更为明显的触觉反馈。
7.在一些可能的实施方式中,压电振动器被配置为沿平行于触控板的第一方向振动;在压电振动器静止时,杠杆沿垂直于第一方向且平行于触控板的第二方向延伸设置。
8.在该实施方式的技术方案中,压电振动器沿平行于触控板的方向振动,而非沿垂
直于触控板的方向振动,可以降低压电振动器在垂直于触控板方向上所需占用的空间,即降低压电振动器及其所在的振动马达所占用的厚度空间。在此基础上,杠杆平行于触控板且垂直于压电振动器的振动方向延伸设置,能够便于提供较长的杠杆力臂,提高杠杆对于压电振动器的振动位移等相关参数的放大倍数,进而提高振动马达的振动性能。
9.在一些可能的实施方式中,振子和/或杠杆为平行于触控板的板状结构。
10.通过该实施方式的技术方案,在垂直于触控板的方向上,振动马达中的振子和/或杠杆可以为厚度较小的板状结构件,因而,该振子和/或杠杆在垂直触控板的方向上,不会占用过多的厚度空间,有利于进一步降低振动马达在触控板中所占用的厚度空间。
11.在一些可能的实施方式中,压电振动器位于杠杆在第三方向上远离触控板的触摸界面的一侧,第三方向垂直于第一方向和第二方向;或者,压电振动器位于杠杆在第一方向上任意一侧。
12.在该实施方式的技术方案中,压电振动器设置于杠杆远离触控板中触摸界面的一侧,可以防止触摸界面上外部的施加的应力对压电振动器造成影响,从而提升压电振动器以及振动马达的整体使用可靠性。或者,压电振动器位于杠杆在第一方向上的任意一侧,该压电振动器可以带动杠杆的动力输入端具有更大的振动位移,因此,该输入的振动位移被杠杆放大后,位于杠杆的动力输出端的振子也具有更大的输出振动位移,通过该实施方式的技术方案,可以进一步提升振子的振动位移从而进一步提升振动马达整体的振动性能。
13.在一些可能的实施方式中,杠杆中形成有凹陷部,压电振动器的至少部分位于该凹陷部中。
14.通过该实施方式的技术方案,可以复用杠杆中的空间容纳压电振动器的至少部分,从而减小振动马达的整体厚度或整体体积。
15.在一些可能的实施方式中,振动马达还包括:胶层,压电振动器通过胶层连接于杠杆。
16.在该实施方式的技术方案中,压电振动器与杠杆的连接方式较为简单,能够提升振动马达的制造效率以及产能。
17.在一些可能的实施方式中,振动马达还包括:中间件,压电振动器通过中间件连接于杠杆,中间件与杠杆的连接面积小于压电振动器朝向杠杆的表面面积。
18.通过该实施方式的技术方案,通过在压电振动器与杠杆之间设置中间件,可以在通过中间件保护压电振动器以提高压电振动器的使用可靠性的同时,还可以使得振子具有更大的振动位移等振动参数,从而提升振动马达的整体振动性能以及振动效果。
19.在一些可能的实施方式中,中间件包括:片状结构以及凸起结构,凸起结构连接于片状结构,且朝向杠杆凸起;中间件通过凸起结构连接于杠杆,且中间件通过片状结构连接于压电振动器。
20.通过该实施方式的技术方案,中间件中的片状结构有利于保护压电振动器防止其发生损坏,中间件中的凸起结构能够使得杠杆对压电振动器的振动位移起到更大的放大作用,从而使得振子具有更大的振动位移,提升振动马达的整体性能。
21.在一些可能的实施方式中,杠杆中设置有配合于凸起结构的凹槽结构。
22.通过该实施方式的技术方案,中间件中的凸起结构可较为可靠且稳定的固定于杠杆的凹槽结构中,提升振动马达整体的使用可靠性。另外,在杠杆中设置凹槽结构,也能够
便于中间件通过凸起结构在杠杆上的安装,提升振动马达的制造效率。
23.在一些可能的实施方式中,压电振动器位于杠杆在第一方向上任意一侧,振动马达还包括:支撑件,支撑件连接于压电振动器在第一方向上远离杠杆的一侧。
24.通过该实施方式的技术方案,在支撑件支撑设置于压电振动器在第一方向上远离杠杆的一侧时,压电振动器在第一方向上靠近杠杆的一侧能够对杠杆起到较为有效的动力输入,从而提升振动马达整体的振动性能。
25.在一些可能的实施方式中,支撑件为弹性件,弹性件与压电振动器共同在第一方向上形成弯曲振动。
26.通过该实施方式的技术方案,弹性件与压电振动器的整体能够在第一方向上产生更大的初始位移,从而提升振子的振动位移,以提升振动马达整体的振动性能。
27.在一些可能的实施方式中,支撑件在第二方向上的尺寸大于或等于压电振动器在第二方向上的尺寸。
28.在一些可能的实施方式中,杠杆的支点处设置有支撑部,支撑部包括固定端和旋转端,旋转端连接于杠杆,且旋转端被配置为跟随压电振动器的振动沿支撑部的轴向旋转。
29.通过该实施方式的技术方案,支撑部能够在杠杆中起到良好的支点作用,进而使得杠杆能够对压电振动器的振动参数起到良好的放大作用。
30.在一些可能的实施方式中,支撑部为轴承。
31.在一些可能的实施方式中,振动马达还包括:壳体,壳体包括顶壳和底壳,顶壳和底壳相互盖合以形成容纳杠杆、压电振动器和振子的容纳空间。
32.通过该实施方式的技术方案,顶壳和底壳形成的壳体可对振动马达中的重要部件起到保护作用,且该壳体能够对振子形成的振动起到力值传导作用,使得振动马达中振子形成的振动通过壳体传导至外部部件。
33.在一些可能的实施方式中,振动马达还包括:弹片机构,连接于振子与壳体之间,弹片机构用于将振子的振动传递至壳体。
34.在一些可能的实施方式中,振动马达还包括:阻尼胶,位于振子与弹片机构之间,阻尼胶用于在压电振动器停止振动时,对振子减振。
35.在一些可能的实施方式中,压电振动器和振子位于杠杆的支点的同一侧;或者,压电振动器和振子位于杠杆的支点的两侧。
36.在一些可能的实施方式中,振子的重量大于杠杆的重量。
37.通过该实施方式的技术方案,振子的重量较大,可以使得振子具有较大的惯性和力值冲击作用,与此同时,杠杆的重量较小,可以减小振动马达的整体重量。在一些可能的实施方式中,杠杆中可形成有通孔以降低该杠杆的重量。
38.在一些可能的实施方式中,杠杆中形成有通孔以降低杠杆的重量。
39.在一些可能的实施方式中,压电振动器由压电陶瓷制备形成,压电陶瓷包括以下任意一种:单层压电陶瓷、多层压电陶瓷、振动方向与电场方向相互平行的压电陶瓷、或者,振动方向与电场方向相互垂直的压电陶瓷。
40.第二方面,提供一种振动马达,该振动马达应用于触控板,且该振动马达用于向触摸于触控板的用户提供振动的触觉反馈,振动马达包括:杠杆;压电振动器,位于杠杆的动力输入端,压电振动器与杠杆的支点之间的距离为第一距离;振子,位于杠杆的动力输出
端,振子与杠杆的支点之间的距离为第二距离,其中,第二距离大于第一距离,杠杆用于将压电振动器的振动位移放大,以使得振子以放大后的振动位移振动。
41.第三方面,提供一种电子设备,包括:第一方面或第一方面中任一可能的实施方式中的触控板,该触控板用于向电子设备提供压力检测以及触觉反馈功能。
附图说明
42.图1为本技术实施例提供的一种振动马达的示意性侧视图和示意性俯视图。
43.图2为本技术实施例提供的另一振动马达的示意性结构爆炸图。
44.图3为本技术实施例提供的另一振动马达的示意性结构爆炸图。
45.图4为本技术实施例提供的压电振动器与杠杆的几种固定连接方式。
46.图5为本技术实施例提供的另一振动马达的局部示意图。
47.图6为本技术实施例提供的振动马达中压电振动器所在区域的示意性放大图。
48.图7为本技术实施例提供的另一振动马达的示意性结构爆炸图。
49.图8为本技术实施例提供的另一振动马达的示意性结构爆炸图。
50.图9为本技术实施例提供的另一振动马达的示意性结构爆炸图。
51.图10为本技术实施例提供的另一振动马达的示意性结构爆炸图。
52.图11为本技术实施例提供的另一振动马达的示意性结构爆炸图。
53.图12为本技术实施例提供的一种触控板的示意性结构图。
具体实施方式
54.下面将结合附图,对本技术实施例中的技术方案进行描述。
55.本技术实施例可适用于振动马达。该振动马达可以应用于各种电子设备,以在电子设备中提供振动的触觉反馈功能。其中,该电子设备可以为手机,平板电脑,智能可穿戴装置、智能门锁等,本公开的实施例对此不做限定。
56.目前相关技术中的振动马达主要包括:转子马达(eccentric rotating mass,erm)、线性马达(linear resonant actuator,lra)和压电马达(piezo)。
57.其中,转子马达振动的原理和直流电机类似,利用电磁感应原理来驱动马达中央的转子转动。转子马达的中央是偏心转子,驱动马达转动时,偏心转子会产生一个离心力,这个离心力使得马达发生微小位移从而产生振动。线性马达是由弹簧、磁性质量块和线圈组成的弹簧系统,弹簧将线圈悬浮在线性马达内部,当线圈中有电流通过时,就会产生磁场。线圈和磁性质量块相连,当流过线圈的电流改变时,磁场的方向和强弱也会改变,质量块在磁场中移动,人们就能感知到振动。上述两种马达均具有较大的体积,对于内部空间较为宝贵的用户终端而言,该两种马达会占用终端设备中较多的空间,不利于终端设备的轻薄化发展。另外,由于线性马达具有较为复杂的结构,其制造成本也较高。
58.为了解决上述两种马达带来的问题,压电马达(piezo)开始在业内受到关注。该压电马达可由压电材料,例如压电陶瓷制备形成,在压电陶瓷上施加电压,这种材料就会发生形变,通过这种形变就能产生振动。相比于上述转子马达和线性马达,该压电马达可以具有更高的振动频率和更小的体积,从而仅需占用终端设备内部较小的空间,即可形成高精度的触觉振动反馈。但普通的压电马达的振动位移量较小且振幅强度较低,例如,一般的压电
马达的振动位移量在30μm以下,难以向用户提供振感明显的触觉反馈,影响用户使用体验。
59.鉴于此,本技术提供一种振动马达,在实现小体积以及低成本的同时,还具有高振动位移量以向用户提供振感明显的触觉反馈,该振动马达能够良好的适应于终端等电子设备的触控板中,提升用户对于终端等电子设备的使用体验。
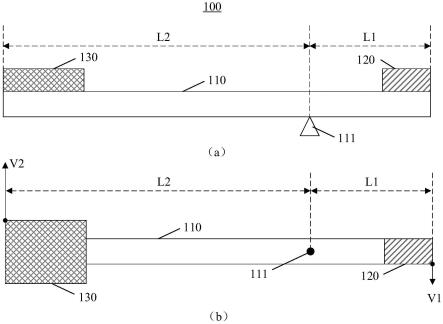
60.图1示出了本技术实施例提供的一种振动马达100的示意性侧视图和示意性俯视图,其中图1中的(a)图为示意性侧视图,图1中的(b)图为示意性俯视图。
61.如图1所示,在本技术实施例中,该振动马达100可被配置为设置于电子设备的触控板中,该振动马达100可向触摸于该触控板的用户提供振动的触觉反馈。具体地,该振动马达100包括:杠杆110、压电振动器120以及振子130。
62.其中,压电振动器120位于杠杆110的动力输入端,压电振动器120与杠杆110的支点111之间的距离为第一距离l1。振子130位于杠杆110的动力输出端,该振子130与杠杆110的支点111之间的距离为第二距离l2,其中,第二距离l2大于第一距离l1,杠杆110用于将压电振动器120的振动位移放大,以使得振子130以放大后的振动位移振动。
63.具体地,在本技术实施例中,压电振动器120可以为通过逆压电效应产生振动的器件,即该压电振动器120可以通过压电材料制备形成,对该压电材料施加电压后,该压电材料可产生机械应力从而发生振动。作为示例而非限定,该压电振动器120可以由压电陶瓷制备形成,或者,该压电振动器120还可以由其它压电聚合物、压电复合材料等压电材料制备形成。
64.该压电振动器120设置于杠杆110的动力输入端,以向杠杆110提供动力输入。相对于压电振动器120,振子130设置于杠杆110的动力输出端。当压电振动器120振动时,其可带动杠杆110以及位于其输出端的振子130跟随发生振动。
65.具体地,该振子130在振动马达100中起到加重量负载作用,其在振动过程中,可具有较大的惯性和力值冲击作用。该振子的材料包括但不限于是:不锈钢、铜、钨钢等金属材料,该金属材料不易发生形变且可以具有较高的使用可靠性。
66.另外,杠杆110在振动马达100中起到放大压电振动器120的振动位移量以及力值传导等作用,该杠杆110的材料包括但不限于是:不锈钢,合金,钨钢,注塑件等等。
67.可选地,在本技术实施例中,振子130与杠杆110可以为一体成型的结构,该振子130与杠杆110的材料相同。或者,振子130与杠杆110也可以为分体式结构,二者通过胶层或者焊接的方式连接在一起,该振子130与杠杆110的材料可以相同或者也可以不同。
68.可选地,在本技术实施例中,振子130的重量可大于杠杆110的重量。在该实施例的技术方案中,振子130的重量较大,可以使得振子130具有较大的惯性和力值冲击作用,与此同时,杠杆110的重量较小,可以减小振动马达100的整体重量。在一些可能的实施方式中,杠杆110中可形成有通孔以降低该杠杆110的重量。
69.具体地,在本技术实施例中,为了实现杠杆110对于压电振动器120的振动位移的放大作用,压电振动器120与杠杆110的支点111之间的第一距离l1小于振子130与支点111之间的第二距离l2。可选地,如图1所示,该压电振动器120与支点111之间的第一距离l1可以理解为压电振动器120在杠杆110上的接触区域与支点111之间的最大距离,类似地,振子130与支点111之间的第二距离l2也可以理解为振子130在杠杆110上的接触区域与支点111之间的最大距离。
70.当压电振动器120振动时,其会产生第一振动速度v1,振子130在杠杆110的带动下,其会产生第二振动速度v2。通过杠杆原理可知,该第一振动速度v1、第二振动速度v2以及上述第一距离l1和第二距离l2可满足关系:v1/l1=v2/l2,因此,第二振动速度v2=(l2/l1)*v1,该第二振动速度v2相对于第一振动速度v1放大了(l2/l1)倍。由于振子130和压电振动器120的振动时间相同,因此,振子130的振动位移相对于压电振动器120的振动位于放大了(l2/l1)倍。基于上述相同的原理,振子130的振动加速度相对于压电振动器120的振动加速度同样放大了(l2/l1)倍。
71.因此,通过上述技术方案,振子130的振动位移、振动速度以及振动加速度均相对于压电振动器120放大了(l2/l1)倍。其中,振动位移具体地反映了振动幅度的大小,振动速度反映了振动能量的大小,振动加速度反映了冲击力的大小。因此,相对于压电振动120,振子130可以具有较大的振动幅度、振动能量以及冲击力,通过该振子130向外部环境提供振动,可以使得用户具有振感更为明显的触觉反馈,从而提升用户的使用体验。
72.综上,在本技术实施例的技术方案中,利用杠杆110、压电振动器120以及振子130构建得到振动马达100,该振动马达100可以兼具压电振动器120低成本、体积小、振动频率高等优点。与此同时,该振动马达100可以利用杠杆110对压电振动器120的振动位移等相关参数进行放大,以使得振子130具有较大的振动位移,通过该振子130向触控板外部传递振动,可以使得按压于触控板的用户具有振感更为明显的触觉反馈。
73.图2示出了本技术实施例提供的另一振动马达100的示意性结构爆炸图。
74.如图2所示,在本技术实施例中,压电振动器120可被配置为沿平行于触控板的方向振动,该触控板可为平行于图2中所示的xy平面的板状结构。
75.具体地,触控板中可包括用于接收用户触摸的盖板,该盖板可为平行于图2中所示的xy平面的板状结构。在本技术实施例中,平行于触控板的方向也可以理解为平行于该盖板的方向。
76.作为示例,压电振动器120可沿图2中所示的第一方向x振动。在压电振动器120静止时,杠杆110沿垂直于第一方向x且平行于触控板的第二方向y延伸设置。在该情况下,上述压电振动器120与支点111之间的第一距离l1和振子130与支点111之间的第二距离l2可以为在第一方向x上的距离。
77.因此,在本技术实施例提供的振动马达100中,压电振动器120沿平行于触控板的方向振动,而非沿垂直于触控板的方向振动,可以降低压电振动器120在垂直于触控板方向上所需占用的空间,即降低压电振动器120及其所在的振动马达100所占用的厚度空间。在此基础上,杠杆110平行于触控板且垂直于压电振动器120的振动方向延伸设置,能够便于提供较长的杠杆力臂,提高杠杆110对于压电振动器120的振动位移等相关参数的放大倍数,进而提高振动马达100的振动性能。
78.在一些示例中,触控板中的盖板可以为长方形的板状结构,其在xy平面上具有长方形的大面。可选地,图2中所示的第一方向x可以为盖板在xy平面上的长边方向,而图2中所示的第二方向y可以为盖板在xy平面上的短边方向。或者,图2中所示的第一方向x可以为盖板在xy平面上的短边方向,而图2中所示的第二方向y可以为盖板在xy平面上的长边方向。
79.可选地,如图2所示,在一些实施方式中,振子130和/或杠杆110可为平行于触控板
的板状结构。或者说,振子130和/或杠杆110可为平行于触控板中盖板的板状结构。
80.通过该实施方式的技术方案,在垂直于触控板的方向(如图2中所示的z方向)上,振动马达100中的振子130和/或杠杆110可以为厚度较小的板状结构件,因而,该振子130和/或杠杆110在垂直触控板的方向上,不会占用过多的厚度空间,有利于进一步降低振动马达100在触控板中所占用的厚度空间。
81.可选地,如图2所示,在一些实施方式中,压电振动器120位于杠杆110在第三方向z上远离触控板中触摸界面(即盖板的触摸界面)的一侧,该第三方向z垂直于第一方向x和第二方向y,该触摸界面为触控板用于接收用户触摸的界面,具体地,该触摸界面可以为触摸板中盖板朝向用户的界面,振动马达100可设置于该盖板的下方。在该实施方式中,压电振动器120设置于杠杆110远离触控板中触摸界面的一侧,可以防止触摸界面上外部的施加的应力对压电振动器120造成影响,从而提升压电振动器120以及振动马达100的整体使用可靠性。
82.可选地,如图2所示,在第三方向z上,杠杆110远离触控板中触摸界面的一侧设置有凹陷部112,该凹陷部112可用于容纳至少部分的压电振动器120。换言之,在第三方向z上,压电振动器120可至少部分位于该凹陷部112中。
83.具体地,在该实施方式中,可以复用杠杆110在第三方向z上的厚度空间容纳至少部分的压电振动器120,该第三方向z为垂直于触控板的厚度方向,因此,通过该实施方式的技术方案,可以进一步降低压电振动器120在厚度方向上所需占用的空间,减小振动马达100的整体厚度。
84.或者,图3示出了本技术实施例提供的另一振动马达100的示意性结构爆炸图。
85.如图3所示,压电振动器120位于杠杆110在第一方向x上的任意一侧。相比于上述图2中所示的实施方式,在该实施方式中,压电振动器120位于杠杆110的第一方向x,且压电振动器120沿第一方向x发生振动,该压电振动器120可以带动杠杆110的动力输入端具有更大的振动位移,因此,该输入的振动位移被杠杆110放大后,位于杠杆110的动力输出端的振子130也具有更大的输出振动位移,通过该实施方式的技术方案,可以进一步提升振子130的振动位移从而进一步提升振动马达100整体的振动性能。
86.可选地,如图3所示,在第一方向x上,杠杆110上也可设置有凹陷部112,该凹陷部112可用于容纳至少部分的压电振动器120。换言之,在第一方向x上,压电振动器120可至少部分位于该凹陷部112中。通过该实施方式的技术方案,压电振动器120充分利用了杠杆110的厚度空间,可以进一步降低压电振动器120在平行于触控板的方向上所需占用的空间,减小振动马达100的整体体积。
87.可选地,在上述申请实施例中,压电振动器120可以为不同类型的压电振动器。例如,在图2和图3所示实施方式中,压电振动器120在第一方向x上具有较长的尺寸,该压电振动器120的电极位于xy平面,该压电振动器120的电场方向平行于第三方向z,该压电振动器120可在第一方向x上收缩伸展形成振动位移。在该实施例中,压电振动器120的电场方向垂直于压电振动器120的振动方向。
88.或者,在其它实施方式中,压电振动器120的电场方向也可以平行于压电振动器120的振动方向。可选地,压电振动器120可以由振动方向与电场方向相互平行或者相互垂直的压电陶瓷制备形成。除此之外,该压电振动器120还可以由单层压电陶瓷或者多层压电
陶瓷制备形成,本技术实施例对于压电陶瓷的具体类型不做限定。
89.图4示出了本技术实施例提供的压电振动器120与杠杆110的几种固定连接方式。
90.如图4中的(a)图所示,在该实施方式中,振动马达100还包括第一胶层131,压电振动器120可通过该第一胶层131直接连接于杠杆110。该实施方式中压电振动器120与杠杆110的连接方式较为简单,能够提升振动马达100的制造效率以及产能。
91.可选地,在该实施方式中,该第一胶层131的面积可以等于压电振动器120与杠杆110的接触面积。在该情况下,该压电振动器120与杠杆110之间受力可较为均匀,有利于保护压电振动器120,防止压电振动器120与杠杆110之间过大的局部压强造成压电振动器120的损坏。
92.如图4中的(b)图所示,在该实施方式中,振动马达100包括中间件140,压电振动器120通过中间件140连接于杠杆110,其中,中间件140与杠杆110的连接面积小于压电振动器120朝向杠杆110的表面面积。具体地,在该实施方式中,中间件140可通过第一胶层131连接于杠杆110,且中间件140通过第二胶层132连接于中间件140。压电振动器120通过第一胶层131、第二胶层132以及中间件140连接于杠杆110,其中,中间件140与杠杆110的连接面积可等于第一胶层131的面积。
93.作为示例而非限定,该中间件140可以为金属片,其具有较薄的厚度且具有较高的强度。该金属片与杠杆110之间的连接面积可等于金属片的大面面积,且该金属片的大面面积可小于压电振动器120朝向杠杆110的表面面积。
94.具体地,在该实施方式中,压电振动器120与杠杆110之间具有中间件140,该压电振动器120与中间件140之间受力可较为均匀,有利于保护压电振动器120防止其发生损坏。进一步地,该中间件140与杠杆110的连接面积小于压电振动器120朝向杠杆110的表面面积,使得压电振动器120和中间件140的整体与杠杆110之间的接触面积较小,从而降低压电振动器120和中间件140的整体在杠杆110上的接触区域与杠杆110的支点111之间的最大距离(即上文图1所示实施例中的第一距离l1),在第一距离l1减小的情况下,杠杆110能够对压电振动器120的振动位移等振动参数起到更大的放大作用,从而使得振子130具有更大的振动位移以及相关的振动参数,该振动马达100具有更优的振动性能。
95.综上,通过该实施方式的技术方案,通过在压电振动器120与杠杆110之间设置中间件140,可以在通过中间件140保护压电振动器120以提高压电振动器120的使用可靠性的同时,还可以使得振子130具有更大的振动位移等振动参数,从而提升振动马达100的整体振动性能以及振动效果。
96.如图4中的(c)图所示,在该实施方式中,中间件140包括:片状结构141和凸起结构142,该凸起结构142连接于片状结构141,且朝向杠杆110凸起,中间件140通过凸起结构142和第一胶层131连接于杠杆110,且中间件140通过片状结构141和第二胶层132连接于压电振动器120。
97.可选地,在该实施方式中,凸起结构142可以为空心结构,或者,也可以为实心结构。相比于上述图4中(b)图所示的技术方案,在中间件140的片状结构141能够与压电振动器120保持较大的连接面积的同时,该中间件140的凸起结构142与杠杆110的连接面积可进一步减小,从而进一步降低压电振动器120和中间件140的整体与杠杆110的支点111之间的最大距离(即上文图1所示实施例中的第一距离l1)。基于该实施方式的技术方案,中间件
140中的片状结构141有利于保护压电振动器120防止其发生损坏,中间件140中的凸起结构142能够使得杠杆110对压电振动器120的振动位移起到更大的放大作用,从而使得振子130具有更大的振动位移,提升振动马达100的整体性能。
98.在一些实施例中,该凸起结构142可通过第一胶层131直接连接于杠杆110。但由于凸起结构142朝向杠杆110的连接面积较小,该凸起结构142与杠杆110的连接可靠性较弱,因而。在另一些实施例中,如图4中的(c)图所示,杠杆110中可设置有配合于该凸起结构142的凹槽结构,第一胶层131设置于凹槽结构中,以使得凸起结构142通过该第一胶层131可靠且稳定的固定于杠杆110的凹槽结构中,提升振动马达100整体的使用可靠性。另外,在杠杆110中设置凹槽结构,也能够便于中间件140通过凸起结构142在杠杆110上的安装,提升振动马达100的制造效率。
99.需要说明的是,上文图4中(a)至(c)图几种实施方式可以应用于图2所示的振动马达100中,或者,也可以应用于图3所示的振动马达100中。
100.可选地,对于图2中所示的振动马达100,压电振动器120位于杠杆110在第三方向z上远离触控板的触摸界面的一侧。为了降低压电振动器120在第三方向z上所需占用的厚度空间,可以使用图4中(a)图所示的实施方式,直接通过第一胶层131将压电振动器120连接于杠杆110,或者,连接于杠杆110在第三方向z上设置的凹陷部112。当然,为了优化振动马达100的振动效果,也可以使用图4中(b)图或者(c)图的实施方式,牺牲一定的厚度空间,提升振子130的振动性能。
101.可选地,对于图3中所示的振动马达100,压电振动器120位于杠杆110在第一方向x上任意一侧。压电振动器120在第一方向x上具有较为充裕的空间,不会额外占用厚度空间。因此,在该情况下,可以优先考虑图4中(b)图或者(c)图所示的实施方式,提升振子130的振动性能以优化振动马达100的振动效果。
102.在压电振动器120位于杠杆110在第一方向x上任意一侧的情况下,图5示出了本技术实施例提供的另一振动马达100的局部示意图。
103.如图5所示,在本技术实施例中,振动马达100还包括:支撑件150,该支撑件150连接于压电振动器120在第一方向x上远离杠杆110的一侧。可选地,该支撑件150可通过胶层连接于压电振动器120。在支撑件150支撑设置于压电振动器120在第一方向x上远离杠杆110的一侧时,该支撑件150能够对压电振动器120起到较好的支撑和稳定作用,压电振动器120在第一方向x上靠近杠杆110的一侧能够对杠杆110起到较为有效的动力输入,从而提升振动马达100整体的振动性能。
104.可选地,在本技术实施例中,该支撑件150包括但不限于是金属片。该支撑件150在第二方向y上的尺寸大于或等于压电振动器120在第二方向y上的尺寸,以使得该支撑件150能够对压电振动器120起到良好的支撑作用,从而进一步优化振动马达100整体的振动性能。
105.可选地,在一些实施方式中,该支撑件150可以为弹性件,例如,支撑件150可以为能够发生弹性形变的金属片。当压电振动器120在第一方向x上发生收缩伸长的振动时,该压电振动器120能够带动与其连接的弹性件在第一方向x上发生弯曲振动,因此,该弹性件与压电振动器120的整体能够在第一方向x上产生更大的初始位移,从而提升振子130的振动位移,以提升振动马达100整体的振动性能。
106.如图5所示,可选地,该弹性件在第二方向y上的尺寸可大于压电振动器120在第二方向y上的尺寸。在该情况下,弹性件在第二方向y上可包覆该压电振动器120。通过该实施方式的技术方案,增加弹性件在第二方向y上的尺寸,可以增加弹性件整体的弹性,从而进一步增强弹性件与压电振动器120的整体在第一方向x上产生的初始位移,从而进一步提升振动马达100的振动效果。
107.可选地,压电振动器120在第二方向y上的尺寸可大于压电振动器120在其它方向(例如,第一方向x和第三方向z)上的尺寸。在该情况下,压电振动器120的伸缩能够对弹性件起到良好的带动作用,使得弹性件在第一方向x上具有更大的弯曲振动形变。通过该实施方式的技术方案,该弹性件与压电振动器120的整体在第一方向x上能够产生更大的初始位移,从而能够进一步提升振动马达100的振动效果。
108.在图5所示实施例的基础上,图6示出了本技术实施例提供的振动马达100中压电振动器120所在区域的示意性放大图。
109.如图6所示,在本技术实施例中,压电振动器120可以通过第三胶层133连接于支撑件150。
110.另外,在图6所示实施例中,振动马达100中除了包括支撑件150以及第三胶层133以外,还可包括:中间件140,该中间件140可以包括凸起结构142和片状结构141,其中,该凸起结构142可为片状结构141的中心部位朝向杠杆110凸起形成的空心凸起结构。压电振动器120可以通过第二胶层132连接于中间件140的片状结构141,且中间件140的凸起结构142通过第一胶层131连接于杠杆110。
111.由于本技术实施例中压电振动器120在第二方向y上具有较大的尺寸,因此,通过中间件140中的凸起结构142将该压电振动器120连接于杠杆110,可以避免压电振动器120距离杠杆110中支点111的距离较大,影响杠杆110对压电振动器120的振动位移的放大效果。
112.综合图6所示实施例中中间件140以及支撑件150的设置,可以较大程度的优化振子130的振动性能,从而较大程度的提升振动马达100的振动效果。
113.基于上述图2所示的振动马达100,图7示出了本技术实施例提供的另一振动马达100的示意性结构爆炸图。
114.如图7所示,在本技术实施例中,压电振动器120位于杠杆110在第三方向z上远离触控板的触摸界面的一侧。在第三方向z上,杠杆110设置有凹陷部,该凹陷部可用于容纳至少部分的压电振动器120。该压电振动器120可通过胶层(图中未示出)连接于杠杆110中的凹陷部。
115.为了使得该压电振动器120能够与外部电学部件相互连接,该压电振动器120上设置有电连接件121,该电连接件121可连接于该压电振动器120的电极以及外部控制电路。作为示例,该电连接件121包括但不限于是柔性电路板(flexible printed circuit,pfc),或者焊接导线等等。
116.另外,如图7所示,在本技术实施例中,杠杆110的支点111处设置有支撑部160,该支撑部160包括固定端161和旋转端162,该旋转端162连接于杠杆110,且该旋转端162被配置为跟随压电振动器120的振动沿支撑部160的轴向旋转。
117.可选地,在一些实施方式中,该支撑部160可以为轴承。具体地,在该实施方式下,
轴承中的内环或者外环可以分别作为固定端161和旋转端162,该内环和外环之间滑动连接或者滚动连接。
118.作为一种示例,如图7所示,支撑部160可以为滚动轴承,其内环和外环之间设置有滚珠或者其它类型的滚动件。其中,固定端161可以为滚动轴承的内环,旋转端162为滚动轴承的外环,该内环可通过第一固定胶1611连接固定于振动马达100中其它的固定部件,外环也可通过第二固定胶1621连接固定于杠杆110的支点111。
119.或者,在另一种示例中,固定端161也可以为滚动轴承的外环,对应的,旋转端162也可以为滚动轴承的内环,该外环可通过第一固定胶1611连接固定于振动马达100中其它的固定部件,内环也可通过第二固定胶1621连接固定于杠杆110的支点111。
120.可以理解的是,支撑部160除了可以为上述图7所示的滚动轴承以外,支撑部160还可以为其它类型的轴承,例如,支撑部160还可以为滑动轴承等等。又或者,在其它实施方式中,支撑部160还可以为除了轴承以外其它的旋转体,旨在使得该支撑部160中连接于杠杆110的旋转端162能够跟随压电振动器120的振动旋转即可,本技术实施例对该支撑部160的具体类型不做限定。
121.通过该实施方式的技术方案,支撑部160能够在杠杆110中起到良好的支点作用,进而使得杠杆110能够对压电振动器120的振动参数起到良好的放大作用。
122.继续参见图7,在本技术实施例中,振动马达100还包括:壳体,该壳体包括顶壳171和底壳172,顶壳171和底壳172相互盖合以形成容纳杠杆110、压电振动器120和振子130的容纳空间。
123.该顶壳171和底壳172形成的壳体可对振动马达100中的重要部件起到保护作用,且该壳体能够对振子130形成的振动起到力值传导作用,使得振动马达100中振子130形成的振动通过壳体传导至外部部件。
124.可选地,该壳体的材料包括但不限于是:不锈钢、铝合金或者注塑件等材料,具有较高的稳定性以及良好的力值传导性能。
125.在本技术实施例中,为了使得压电振动器120对杠杆110起到可靠且稳定的力值传导,该压电振动器120通过粘贴胶122粘贴于底壳172上,该粘贴胶包括但不限于是:环氧树脂、热固胶、紫外(ultraviolet,uv)固化胶、双面胶或者导电胶等等。
126.另外,上述支撑部160中的固定端161也可以通过第一固定胶1611固定于该底壳172上,以使得该支撑部160的固定端161具有较高的稳定性。可选地,该第一固定胶1611以及前述第二固定胶1621包括但不限于是:环氧树脂、热固胶、uv固化胶或者双面胶等等。
127.继续参见图7,在本技术实施例中,振动马达100还包括:弹片机构180,该弹片机构180连接于振子130与壳体之间,该弹片机构180用于将振子130的振动传递至壳体。
128.可选地,如图7所示,该弹片机构180可对称分布设置于振子130在第一方向x上的两侧。该弹片机构180除了可用于将振子130的振动传递至壳体以外,还可用于在第一方向x上支撑振子130,使得振子130能够悬空于顶壳171和底壳172之间。
129.可选地,该弹片机构180的材料包括但不限于是:弹簧钢、不锈钢、合金等等。该弹片机构180可以采用冲压工艺制备形成,且该弹片机构180可以通过激光焊接的方式连接于振子130。
130.继续参见图7,在本技术实施例中,振动马达100还包括:阻尼胶190,该阻尼胶190
位于振子130与上述弹片机构180之间,该阻尼胶190用于在压电振动器120停止振动时,对振子130减振。
131.可选地,该阻尼胶190包括但不限于是:双面胶、硅胶、泡棉等等。通过在振子130与弹片机构180之间设置阻尼胶190,可以使得压电振动器120停止振动时,振子130也能快速的停止振动,进一步优化对用户的振动触觉反馈。
132.图8示出了本技术实施例提供的另一振动马达100的示意性结构爆炸图。
133.如图8所示,在本技术实施例中,振动马达100同样可包括:杠杆110、压电振动器120和振子130。相比于图7中,压电振动器120与振子130位于杠杆110的支点111的同一侧的技术方案,在图8所示实施例中,压电振动器120与振子130分别位于杠杆110的支点111的两侧。具体地,压电振动器120与振子130分别位于支点111在第二方向y上的两侧。
134.在本技术实施例中,除了上述位置关系的差异以外,杠杆110、压电振动器120与振子130的其它相关技术方案可以参见上文实施例的相关描述,此处不做过多赘述。
135.具体地,在压电振动器120与振子130位于杠杆110的支点111的同一侧的情况下,振子130与支点111之间的第二距离l2可以包括压电振动器120与支点111之间的第一距离l1,即压电振动器120与支点111之间的第一距离l1位于振子130与支点111之间的第二距离l2之中。在该情况下,可以充分利用杠杆110的尺寸合理设置压电振动器120和振子130,在保证振子130的振动位移具有较大放大倍数的情况下,降低杠杆110及其所在振动马达100所需占用的空间。
136.另外,除了杠杆110、压电振动器120与振子130,在本技术实施例中,振动马达100还可以包括:位于杠杆110支点111处的支撑部160、壳体(包括顶壳171和底壳172)、弹片机构180以及阻尼胶190。该各部件的相关技术方案可以与上文图7所示实施例的技术方案相同,此处同样不再做过多赘述。
137.基于上述图3所示的振动马达100,图9示出了本技术实施例提供的另一振动马达100的示意性结构爆炸图。
138.如图9所示,在本技术实施例中,该振动马达100可包括:杠杆110、压电振动器120、振子130、位于杠杆110支点111处的支撑部160、壳体(包括顶壳171和底壳172)、弹片机构180以及阻尼胶190。
139.具体地,如图9所示,压电振动器120位于杠杆110在第一方向x上的任意一侧。该杠杆110在第一方向x上设置有凹陷部,压电振动器120在第一方向x上的第一端可通过胶层直接固定设置于该凹陷部中,压电振动器120在第一方向x上的第二端可设置有该压电振动器120的电极。该压电振动器120的电极可通过导电胶124连接于电连接件121,其中,该电连接件121可以为柔性电路板(flexible printed circuit,fpc)。可选地,在为了提高fpc的稳定性和可靠性,该fpc对应设置有补强板123。该补强板123通过粘贴胶122粘贴于底壳172,以将fpc以及压电振动器120固定于底壳172。
140.可选地,如图9所示,在本技术实施例中,顶壳171在对应于压电振动器120的位置设置有开孔,以避让该压电振动器120。通过在顶壳171中设置开孔,可以利用顶壳171的厚度容纳压电振动器120,从而降低振动马达100的整体厚度。
141.当然,在替代实施方式中,顶壳171中也可不设置开孔,该顶壳171可以对压电振动器120等部件进行保护,提升振动马达100的使用可靠性。
142.除了上述压电振动器120和顶壳171的相关技术方案与图7所示实施例有所不同以外,在本技术实施例中,支撑部160、弹片机构180以及阻尼胶190等各部件的相关技术方案可以与上文图7所示实施例的技术方案相同,具体可参见上文描述,此处不再做过多赘述。
143.基于上述图5和图6所示的振动马达100,图10和图11示出了本技术实施例提供的另两种振动马达100的示意性结构爆炸图。
144.如图10和图11所示,在本技术实施例中,该振动马达100可包括:杠杆110、压电振动器120、振子130、中间件140、支撑件150、位于杠杆110支点111处的支撑部160、壳体(包括顶壳171和底壳172)、弹片机构180以及阻尼胶190。
145.具体地,在本技术实施例中,压电振动器120位于杠杆110在第一方向x上的任意一侧。压电振动器120通过中间件140连接于杠杆110。其中,中间件140包括片状结构141以及凸起结构142,该凸起结构142可为片状结构141的中心部位朝向杠杆110凸起形成的空心凸起结构,且该凸起结构142可通过第一胶层131连接于杠杆110。可选地,该杠杆110中形成有配合于该凸起结构142的凹槽结构,第一胶层131设置于凹槽结构中,以稳定可靠的实现中间件140与杠杆110的相互连接。
146.在此基础上,中间件140可通过第二胶层132连接于压电振动器120,该压电振动器120在第二方向y上的尺寸可大于第二胶层132以及中间件140在第二方向y上的尺寸。压电振动器120在其第三方向z上的一侧设置有电连接件121以实现压电振动器120与外部电学部件的电连接。
147.除了中间件140以外,本技术实施例中的振动马达100还包括:支撑件150,压电振动器120在其第一方向x上远离杠杆110的一侧设置有第三胶层133,支撑件150通过第三胶层133连接于压电振动器120。
148.可选地,如图10所示,该支撑件150在第二方向y上的尺寸可以与压电振动器120在第二方向y上的尺寸相同。支撑件150在其第一方向x上远离压电振动器120的一侧设置有固定胶151,该固定胶151沿第二方向y延伸,以至少部分覆盖支撑件150在第一方向x上远离压电振动器120的一面,且至少部分覆盖支撑件150在第二方向y上的两端。该固定胶151用于将支撑件150固定连接于底壳172,以使得支撑件150具有良好的固定稳定性。
149.可选地,如图11所示,该支撑件150可以为弹性件,该弹性件在第二方向y上的尺寸可以大于压电振动器120在第二方向y上的尺寸。在该支撑件150为弹性件时,该弹性件能与压电振动器120的整体能够在第一方向x上形成较大程度的弯曲振动,从而在第一方向x上形成较大的振动位移。为了固定该弹性件,该弹性件在第二方向y上的两端设置有固定胶151,该固定胶151能够将弹性件稳定且可靠的固定连接于底壳172。
150.与上文图9所示实施例类似,在本技术图10和图11所示实施例中,顶壳171在对应于压电振动器120的位置也可设置有开孔,以避让该压电振动器120。
151.除了上述压电振动器120、中间件140、支撑件150以及顶壳171的相关技术方案与图7所示实施例有所不同以外,在本技术实施例中,支撑部160、弹片机构180以及阻尼胶190等各部件的相关技术方案可以与上文图7所示实施例的技术方案相同,具体可参见上文描述,此处不再做过多赘述。
152.图12示出了本技术实施例提供的一种触控板10的示意性结构图。可选地,该触控板10可以为沿xz方向的示意性截面图。
153.如图12所示,该触控板10包括:盖板101、电路板102、压力检测装置103以及振动马达100。
154.具体地,电路板102设置于盖板101下方,电路板上设置有触摸感应电极(图12中未示出),用于感应用户在盖板101上的触摸。压力检测装置103设置于电路板102下方,用于检测用户在盖板101上施加的压力。振动马达100设置于电路板102下方,用于根据用户在盖板上施加的压力产生振动,以向触摸于用户提供振动的触觉反馈。
155.其中,振动马达100可以上文任一实施例中所述的振动马达,参见图1中所示的振动马达,其具体可包括:杠杆110、压电振动器120和振子130。该压电振动器120位于杠杆110的动力输入端,用于接收指示用户在盖板101上施加的压力大小的电信号以产生振动,压电振动器120与杠杆110的支点111之间的距离为第一距离l1;振子130位于杠杆110的动力输出端,振子130与杠杆110的支点111之间的距离为第二距离l2,其中,第二距离l2大于第一距离l1,杠杆110用于将压电振动器120的振动位移放大,以使得振子130以放大后的振动位移振动并向用户提供振动的触觉反馈。
156.在本技术实施例中,盖板101具有可朝向用户的触摸界面,用于接收用户手指或者其它物体在盖板101上的触摸。该盖板101包括但不限于是玻璃盖板或者其它材料的盖板。
157.电路板102设置于盖板101的下方,即电路板102设置于盖板101远离触摸界面的一侧。作为示例,如图12所示,电路板102可通过胶层固定连接于盖板101的下表面。该电路板102包括印刷电路板(printed circuit board,pcb)板。该电路板102上可设置有触摸感应电极以及其它相关电学元件,通过该触摸感应电极,可以确定用户在盖板101上的触摸位置。作为示例,当用户手指触摸于盖板101时,用户手指可与触摸感应电极形成电容信号,根据该电容信号可判断用户手指在盖板101上的触摸位置。
158.可选地,本技术实施例中的触摸感应电极可通过电路板102电连接至处理器(或者也可称为控制器),该处理器用于接收触摸感应电极感应到的信号(例如电容信号)从而判断用户在盖板101上的触摸位置。在一些实施方式中,该处理器可以为触摸板10的专用处理器,或者,在另一实施方式中,该处理器也可以为触摸板10所在的电子设备中的处理器,例如,电子设备的主控处理器可复用为本技术实施例中的处理器。
159.另外,触控板10还包括压力检测装置103和振动马达100。其中,该压力检测装置103和振动马达100也设置于上述电路板102的下方。可选地,如图12所示,该振动马达100可通过胶层连接于电路板102的下表面,以使得该振动马达100的振动能够有效的通过电路板102以及盖板101传递至触摸于盖板101的用户。
160.可选地,该压力检测装置103包括但不限于是压力传感器,该压力传感器例如可以为应变片或者是其它类型的传感器。为了便于该压力检测装置103在电路板102下方的安装,该压力检测装置103可固定设置于支架104,该支架104可通过连接层106连接于电路板102。
161.作为示例,该电路板102下方还设置有补强板105,支架104可通过连接层106连接于补强板105。该补强板105和振动马达100可并排设置于电路板102的下方。
162.可选地,该连接层106包括但不限于是弹性连接层,其例如可以为硅胶,该硅胶不仅可以起到连接作用,还可以对振动的振动马达100起到阻尼作用,使得振动马达100快速停止振动。
163.当用户触摸或按压于触控板10的盖板101时,该压力可通过盖板101、电路板102、连接层106以及支架104传递至压力检测装置103,以使得该压力检测装置103检测用户在盖板101上施加的压力。进一步地,振动马达100可基于该压力的大小向触摸于盖板101的用户提供振动的触觉反馈。
164.可选地,该振动马达100与压力检测装置103均可以连接于处理器,压力检测装置103将其检测到的压力值传输至处理器,处理器对该压力值进行处理后,向振动马达100发送相关电信号,以使得振动马达100开始振动或者停止振动。具体地,振动马达100中的压电振动器120可接收该处理器发送的相关电信号,以开始振动或者停止振动,从而带动振子130开始振动或者停止振动。
165.作为一种示例,处理器接收压力检测装置103发送的压力大小后,可判断其与预设阈值的关系,当压力值大于第一预设阈值时,该处理器向振动马达100发送第一电信号,以指示振动马达100开始振动,当压力值小于第二预设阈值时,该处理器向振动马达100发送第二电信号,以指示振动马达100停止振动。
166.可选地,上述示例中的处理器可以与上述用于接收触摸感应电极信号以判断用户在盖板101上的触摸位置的处理器为同一处理器。
167.另外,在本技术实施例提供的触控板10中,振动马达100的其它技术方案可以参见上文图1至图11所示实施例的相关描述,此处不再做过多赘述。
168.在本技术实施例的技术方案中,提供了一种触控板,该触控板包括触摸感应电极以及压力检测装置,可以同时实现用户在盖板的触摸检测以及压力检测,与此同时,该触控板还包括振动马达,该振动马达可根据用户在盖板上施加的压力产生振动,以向用户提供振动的触觉反馈,因此,该触控板可以实现多种功能以提升用户的使用体验。进一步地,在该触控板中,利用杠杆、压电振动器以及振子构建得到振动马达,该振动马达可以兼具压电振动器低成本、体积小、振动频率高等优点。与此同时,该振动马达可以利用杠杆对压电振动器的振动位移等相关参数进行放大,以使得振子具有较大的振动位移,通过该振子向触控板外部传递振动,可以使得按压于触控板的用户具有振感更为明显的触觉反馈。
169.本技术实施例还提供了一种电子设备,该电子设备包括上述本技术实施例中的触控板10,该触控板10用于向电子设备提供压力检测以及触觉反馈功能。
170.作为示例而非限定,本技术实施例中的电子设备可以为终端设备、手机、平板电脑及其配件键盘、笔记本电脑、台式机电脑、游戏设备、车载电子设备或穿戴式智能设备等便携式或移动计算设备,以及电子数据库、汽车、银行自动柜员机(automated teller machine,atm)等其他电子设备。该穿戴式智能设备包括功能全、尺寸大、可不依赖智能手机实现完整或部分功能的设备,例如智能手表或智能眼镜等,以及包括只专注于某一类应用功能并且需要和其它设备如智能手机配合使用的设备,例如各类进行体征监测的智能手环、智能首饰等设备。
171.需要说明的是,在不冲突的前提下,本技术描述的各个实施例和/或各个实施例中的技术特征可以任意的相互组合,组合之后得到的技术方案也应落入本技术的保护范围。
172.应理解,本技术实施例中的具体的例子只是为了帮助本领域技术人员更好地理解本技术实施例,而非限制本技术实施例的范围,本领域技术人员可以在上述实施例的基础上进行各种改进和变形,而这些改进或者变形均落在本技术的保护范围内。
173.以上所述,仅为本技术的具体实施方式,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应以所述权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1