一种三维实景建模高速存储装置的制作方法
1.本实用新型属于实景测绘技术领域,具体涉及一种三维实景建模高速存储装置。
背景技术:
2.三维实景的重建需要两种信息,模型形状信息和模型色彩信息,形状信息用于建立模型及确定其位置,色彩信息赋予模型色彩。现有的三维实景一般同时使用两种传感器,如公开号为cn107194983b,使用三维激光相机采集点云数据,同时使用普通相机采集普通带有色彩的图像数据,然后使用带有色彩的图像数据对点云进行着色,生成带有着色的点云模型,从而将距离与颜色信息结合,生成带有颜色的三维模型。
3.另外,三维实景图像及模型的生成需要对周围大角度范围的三维实景数据进行采集,由于不存在能够直接进行720度拍摄的镜头,所以目前的三维实景数据采集均是使用多个镜头、每个镜头分别采集一部分角度范围的图像、然后将图像以环形或球形拼接处理。
4.但是,由于多个镜头同时拍摄会产生成倍的图像数据,因此对存储器的带宽要求较高,而将多个镜头所拍摄图像数据同时进行处理、拼接又会使处理器承担较大计算载荷。如果想要拍摄较为清晰、精准的三维实景图像及模型,更多的图像数据会超过普通存储器、处理器的承担能力,使存储器、处理器的能力上限对三维实景图像及模型的清晰度、准确度产生限制,因此,需要一种能够减轻存储器、处理器负担,实现实景建模数据高速存储的装置。
技术实现要素:
5.基于现有技术中存在的上述缺点和不足,本实用新型的目的之一是至少解决现有技术中存在的上述问题之一或多个,换言之,本实用新型的目的之一是提供满足前述需求之一或多个的一种三维实景建模高速存储装置。
6.为了达到上述实用新型目的,本实用新型采用以下技术方案:
7.一种三维实景建模高速存储装置,具体包括:
8.若干个距离传感器和图像传感器,距离传感器和图像传感器被划分为若干组由一个距离传感器和一个图像传感器组成的实景三维传感器组,每组实景三维传感器组被配置为由距离传感器和图像传感器共同采集指定角度范围的三维实景距离和图像数据数据,每个实景三维传感器组分别采集指定角度范围的一部分;
9.第一存储器组,第一存储器组具有多个第一存储器,每个距离传感器均与一个第一存储器通信连接;
10.模型生成模块组,模型生成模块组具有多个模型生成模块,每个模型生成模块分别与若干个第一存储器通信连接,每个第一存储器均与一个模型生成模块连接;
11.第二存储器组,第二存储器组具有多个第二存储器,每个图像传感器均与一个第二存储器通信连接;
12.着色处理模块组,着色处理模块组具有多个着色处理模块,每个着色处理模块与
连接至同一个所述实景三维传感器组中距离传感器和图像传感器的第一存储器和第二存储器通信连接,且每个着色处理模块的输出端与一个第三存储器通信连接;
13.拼接计算模块,拼接计算模块同时与全部第三存储器通信连接,且输出端与第四存储器通信连接。
14.作为优选方案,装置还包括:
15.数据输出端口,数据输出端口与第四存储器通信连接。
16.作为优选方案,第四存储器为可插拔存储器。
17.作为优选方案,装置还包括:
18.蓄电池,蓄电池分别与距离传感器、第一存储器、模型生成模块、图像传感器、第二存储器、着色处理模块、第三存储器、拼接计算模块、第四存储器电性连接。
19.作为优选方案,距离为激光雷达或超声雷达。
20.作为优选方案,装置还包括:
21.无线传输模块,无线传输模块与第四存储器通信连接。
22.本实用新型与现有技术相比,有益效果是:
23.本实用新型的装置将多个实景三维传感器组的距离和图像数据分散传输至多个存储器中,减少了对每个存储器的带宽需求。且将各个存储器中储存的数据先分别建模、着色后再进行拼接存储,减少了处理器的计算载荷和原始数据到拼接完成的图像之间的数据传输量。
附图说明
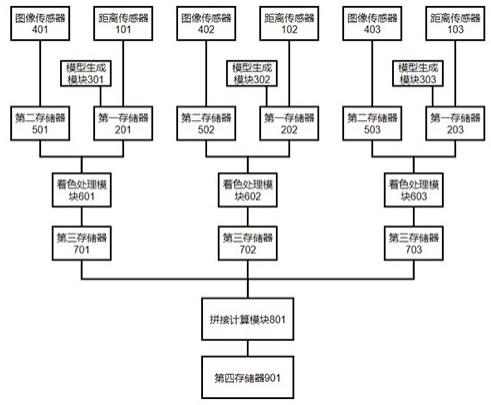
24.图1是本实用新型的一种三维实景建模高速存储装置的结构框图。
具体实施方式
25.为了更清楚地说明本实用新型实施例,下面将结合附图说明本实用新型的具体实施方式。显而易见地,下面的描述仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些实施例获得其他的实施方式。
26.本实施例提供一种三维实景建模高速存储装置,其结构框图如图1所示,包括:
27.多组实景三维传感器组,每组实景三维传感器组都包括一个距离传感器和一个图像传感器,距离传感器采集用于生成模型点云或面体的距离数据,图像传感器用于采集对模型进行着色、使其与实景视觉效果一致的图像数据,在一组实景三维传感器组中,距离传感器和图像传感器的朝向相同。
28.在本实施例中,将实景三维传感器组设为三组,其中的距离传感器分别编号为101-103,图像传感器分别编号为401-403。每个实景三维传感器组分别朝向一个方向,并采集以该方向为中心指定角度范围内的三维实景图像数据,四个实景三维传感器组的采集范围合并后覆盖指定的大角度范围,在某些实施例中,该大角度范围为360度环形或720度球形。
29.距离传感器使用激光雷达或超声雷达等能够获取目标表面与传感器间距的设备采集周围实景表面的点云数据或面体数据。图像传感器使用常规的可见光相机采集带有色彩的二维图像数据。
30.第一存储器组,第一存储器组由四个第一存储器201-203构成,每个第一存储器的输入端口均与一个距离传感器的输出端口数据通信连接,使每个距离传感器1所采集到的三维实景图像数据分别不同地进入一个第一存储器。
31.模型生成模块组,模型生成模块组以与第一存储器201相同数量的模型生成模块301-303构成,每个模型生成模块的输入端口分别与一个第一存储器的输出端口数据通信连接,第一存储器201与模型生成模块301连接、第一存储器202与模型生成模块302连接、第一存储器203与模型生成模块303连接、第一存储器203与模型生成模块303连接。
32.模型生成模块选用cpu、gpu或fpga等具有模型运算能力的处理器,每个模型生成模块从与其相连的第一存储器中读取点云、面体数据,并对点云或面体数据进行包括消除噪点、裁剪范围、修复离群点、三维建模、模型压缩等三维模型的生成运算。
33.每个模型生成模块根据与其连接的第一存储器中所存储的点云、面体数据分别生成三维模型后,将生成的三维模型数据回传至与其相连的第一存储器中。
34.本实施例的装置还包括由三个第二存储器构成的第二存储器组,三个第二存储器分别编号为501-503,三个第二存储器501-503分别一一地与一个图像传感器401-403连接,存储图像传感器获得的色彩图像数据。
35.三个编号为601-603的着色处理模块,其中着色处理模块601与第一存储器201和第二存储器501连接,第一存储器201和第二存储器501分别与同属于第一个实景三维传感器组的图像传感器401和距离传感器101连接。着色处理模块从与其相连的第一存储器和第二存储器中调取来自于同一个实景三维传感器组、同一个角度范围的三维模型数据及色彩图像数据,将色彩图像数据着色于三维模型数据上。
36.每个着色处理模块分别与一个第三存储器连接,将来自于三个不同角度范围的着色后的三维实景模型数据分别存储于第三存储器701-703中。
37.拼接计算模块801,其输入端口同时与第三存储器701-703的输出端口连接,或以四个输入端口分别与第三存储器701-703中一个的输出端口连接。
38.拼接计算模块同样选用cpu、gpu或fpga等处理器,调取存储于第三存储器701-703中修正、压缩及着色后的三维实景模型数据,将每个存储器中存储的三维实景模型数据作为一部分,拼接生成完整的更大角度范围的三维实景模型。
39.第四存储器901,与拼接计算模块连接,拼接计算模块生成的完整三维实景模型将存储至第四存储器901中。
40.为了能够实时将生成的三维实景模型导出,作为一种改进,本实施例的装置还设置数据输出端口,数据输出端口采用usb端口,与第四存储器901的输出端连接,供外部导出存储于第四存储器901中的三维实景模型。
41.本实施例的装置还可以设置无线传输模块,与第四存储器901连接,使其中存储的三维实景模型数据能够以无线方式传输导出。
42.另外,也可以将第四存储器901配置为存储卡、光盘等可插拔式存储器,在需要使用三维实景模型时将可插拔式存储器取下,或在第四存储器901容量用尽时插拔更换新的第二存储器。
43.在某些实施例中,本实用新型的装置还可以安装蓄电池,与上述的距离传感器、第一存储器、模型生成模块、图像传感器、第二存储器、着色处理模块、拼接计算模块、第四存
储器电性连接,为其供电,使本装置能够在无电源连接的环境下运行一段时间。
44.应当说明的是,上述实施例仅是对本实用新型的优选实施例及原理进行了详细说明,对本领域的普通技术人员而言,依据本实用新型提供的思想,在具体实施方式上会有改变之处,而这些改变也应视为本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1