一种车道线关联配准方法、装置、设备及存储介质与流程
本技术涉及自动驾驶,具体涉及一种车道线关联配准方法、装置、设备及存储介质。
背景技术:
1、车道分界线(简称车道线)是用来分隔同向行驶的交通流的交通标线,一般为的是白色虚、实线或黄色虚、实线。白色虚线是分隔同向车的,在安全的情况下可以变道、超车。白色实线也是分隔同向车的,不过不可变道。黄色实线是分隔不同向行驶的车的,有时是分隔同向车的,既可作分界线,也可做中心线,不可变道。黄色虚线既可作分界线,也可做中心线,做分界线时可变道。
2、目前,在视觉车道线和地图车道线进行关联配准时,现有方法一般是:采集道路车道线三次曲线,根据曲线重合度和相似度估计车辆位置。然后在估计位置周围配置样本点并预测下一时刻位置。但是,现有方式将地图形点拟合为三次曲线将引入误差时会导致部分失真,如果出现失真则会改变样本数量,而估计车辆位姿的准确性与配置样本点的数量有关,样本数量较少会使误差增大,而样本数量较多会导致计算代价增加。同时,在采用icp算法进行匹配时,需要在车道线与局部地图上找到一一对应的匹配点对,这对选点的要求较高,误差不易收敛,将影响匹配结果的误差。
技术实现思路
1、鉴于以上所述现有技术的缺点,本技术提供一种车道线关联配准方法、装置、设备及存储介质,以解决上述技术问题。
2、本技术提供一种车道线关联配准方法,包括以下步骤:
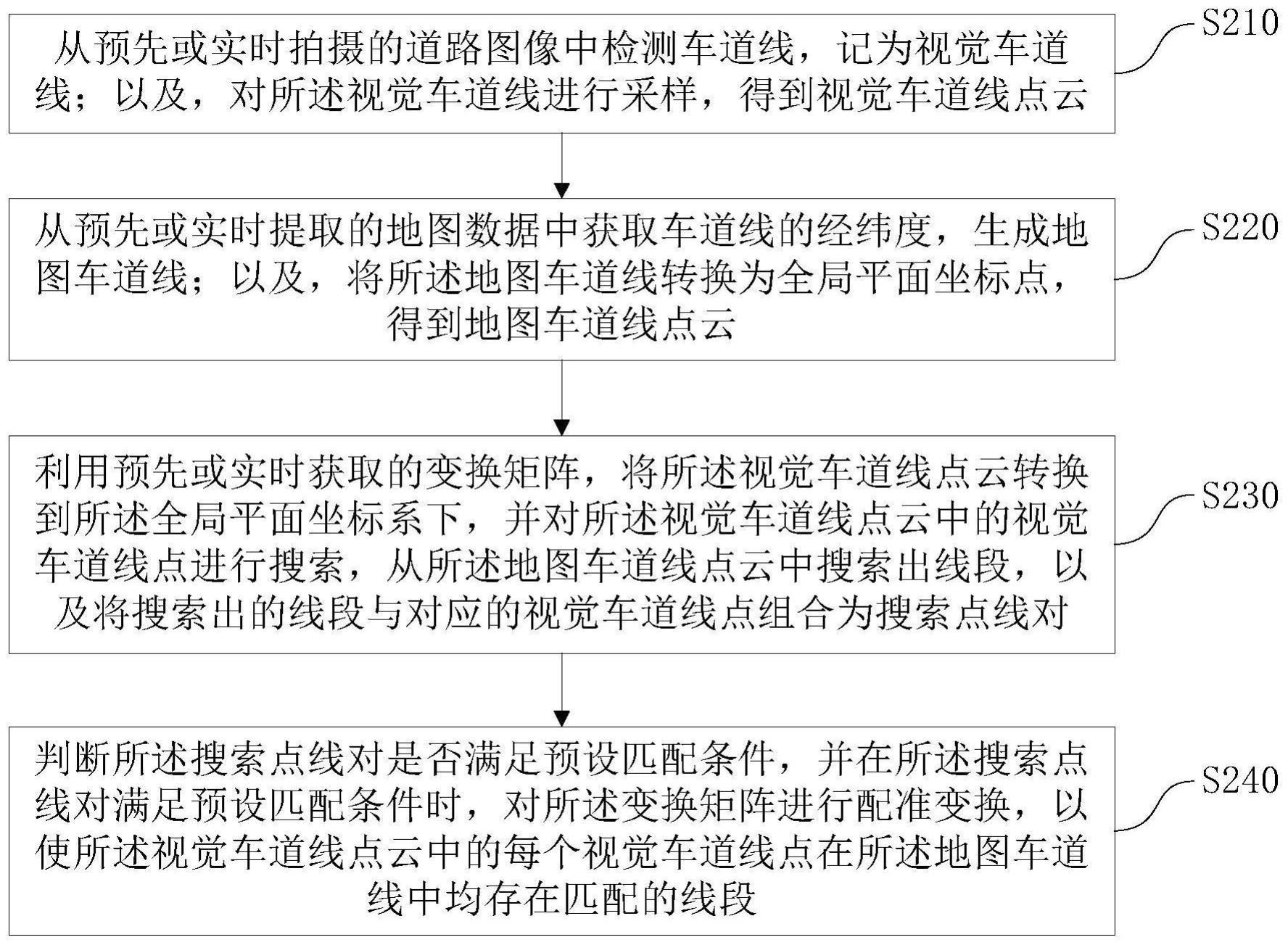
3、从预先或实时拍摄的道路图像中检测车道线,记为视觉车道线;以及,对所述视觉车道线进行采样,得到视觉车道线点云;
4、从预先或实时提取的地图数据中获取车道线的经纬度,生成地图车道线;以及,将所述地图车道线转换为全局平面坐标点,得到地图车道线点云;
5、利用预先或实时获取的变换矩阵,将所述视觉车道线点云转换到所述全局平面坐标系下,并对所述视觉车道线点云中的视觉车道线点进行搜索,从所述地图车道线点云中搜索出线段,以及将搜索出的线段与对应的视觉车道线点组合为搜索点线对;
6、判断所述搜索点线对是否满足预设匹配条件,并在所述搜索点线对满足预设匹配条件时,对所述变换矩阵进行配准变换,以使所述视觉车道线点云中的每个视觉车道线点在所述地图车道线中均存在匹配的线段。
7、于本技术的一实施例中,判断所述搜索点线对是否满足预设匹配条件的过程包括:
8、获取所述视觉车道线点云中的第一视觉车道线点,并从所述地图车道线点云中搜索出与所述第一视觉车道线点相关联的线段,记为第一地图线段;
9、获取所述第一视觉车道线点到所述第一地图线段所在直接的投影点,并判断所述投影点是否在所述第一地图线段上;以及,
10、计算所述第一视觉车道线点到所述第一地图线段的距离,并判断所述距离是否小于最大匹配阈值;以及,
11、计算所述视觉车道线与所述第一地图线段的夹角,并判断所述夹角是否小于最大角度阈值;
12、若所述投影点在所述第一地图线段上、所述距离小于最大匹配阈值以及所述夹角小于最大角度阈值,则确定所述搜索点线对符合预设匹配条件,构成匹配点线对;
13、若所述投影点不在所述第一地图线段上、所述距离大于或等于最大匹配阈值、和/或所述夹角大于或等于最大角度阈值,则确定所述搜索点线对不符合预设匹配条件,未构成匹配点线对;
14、其中,所述搜索点线对由所述第一视觉车道线点和所述第一地图线段组合形成;所述最大匹配阈值以及所述最大角度阈值根据实际工程数值得到。
15、于本技术的一实施例中,对所述变换矩阵进行配准变换的过程包括:
16、将第一视觉车道线点到所述第一地图线段的距离定义为匹配误差;
17、根据所述第一视觉车道线点的坐标以及所述第一地图线段的直线方程,构建误差方程;
18、根据所述误差方程计算使得所有匹配误差的平方和最小的配准变换矩阵。
19、于本技术的一实施例中,所述变换矩阵的获取过程包括:
20、获取目标车辆的经纬度信息、航向信息、轮速信息和横摆角速度;
21、基于所述经纬度信息、航向信息、轮速信息和横摆角速度,确定所述目标车辆在所述全局平面坐标系中的位姿;
22、根据所述目标车辆在所述全局平面坐标系中的位姿计算出所述变换矩阵。
23、于本技术的一实施例中,根据所述目标车辆在所述全局平面坐标系中的位姿计算出所述变换矩阵的过程包括:
24、将所述目标车辆在所述全局平面坐标系中的位姿记为p(tx,ty,θ);
25、将所述变换矩阵记为tw_v,则根据所述目标车辆在所述全局平面坐标系中的位姿计算出所述变换矩阵,有:
26、
27、式中,tw_v表示变换矩阵。
28、于本技术的一实施例中,根据所述第一视觉车道线点的坐标以及所述第一地图线段的直线方程,构建误差方程的过程包括:
29、获取所述第一视觉车道线点的坐标,记为(xi,yi);以及,
30、获取所述第一地图线段的直线方程,记为aix+biy+ci=0;
31、根据所述第一视觉车道线点的坐标以及所述第一地图线段的直线方程,构建误差方程,有:
32、
33、式中,ei表示误差方程,ai、bi、ci为常数,i为自然数。
34、于本技术的一实施例中,所述道路图像的拍摄过程包括:将图像拍摄装置预设在目标车辆上,并在所述目标车辆处于行驶状态或静止状态下,利用所述图像拍摄装置拍摄与所述目标车辆处于预设距离范围内的道路,得到所述道路图像;其中,所述目标车辆包括以下至少之一:新能源车辆、燃油车辆。
35、本技术还提供一种车道线关联配准装置,所述装置包括有:
36、视觉车道线模块,用于从预先或实时拍摄的道路图像中检测车道线,记为视觉车道线;以及,对所述视觉车道线进行采样,得到视觉车道线点云;
37、地图车道线模块,用于从预先或实时提取的地图数据中获取车道线的经纬度,生成地图车道线;以及,将所述地图车道线转换为全局平面坐标点,得到地图车道线点云;
38、点线对搜索模块,用于利用预先或实时获取的变换矩阵,将所述视觉车道线点云转换到所述全局平面坐标系下,并对所述视觉车道线点云中的视觉车道线点进行搜索,从所述地图车道线点云中搜索出线段,以及将搜索出的线段与对应的视觉车道线点组合为搜索点线对;
39、匹配模块,用于判断所述搜索点线对是否满足预设匹配条件;
40、配准变换模块,用于在所述搜索点线对满足预设匹配条件时,对所述变换矩阵进行配准变换,以使所述视觉车道线点云中的每个视觉车道线点在所述地图车道线中均存在匹配的线段。
41、本技术还提供一种车道线关联配准设备,所述设备包括:
42、一个或多个处理器;
43、存储装置,用于存储一个或多个程序,当所述一个或多个程序被所述一个或多个处理器执行时,使得所述设备实现如上述中任一项所述的车道线关联配准方法。
44、本技术还提供一种计算机可读存储介质,其上存储有计算机程序,当所述计算机程序被计算机的处理器执行时,使计算机执行如上述中任一项所述的车道线关联配准方法。
45、如上所述,本技术提供一种车道线关联配准方法、装置、设备及存储介质,具有以下有益效果:
46、本技术通过从预先或实时拍摄的道路图像中检测车道线,记为视觉车道线;以及,对所述视觉车道线进行采样,得到视觉车道线点云;并预先或实时提取的地图数据中获取车道线的经纬度,生成地图车道线;以及,将所述地图车道线转换为全局平面坐标点,得到地图车道线点云;再利用预先或实时获取的变换矩阵,将所述视觉车道线点云转换到所述全局平面坐标系下,并对所述视觉车道线点云中的视觉车道线点进行搜索,从所述地图车道线点云中搜索出线段,以及将搜索出的线段与对应的视觉车道线点组合为搜索点线对;最后判断所述搜索点线对是否满足预设匹配条件,并在所述搜索点线对满足预设匹配条件时,对所述变换矩阵进行配准变换,以使所述视觉车道线点云中的每个视觉车道线点在所述地图车道线中均存在匹配的线段。由此可知,本技术采用点-线对匹配的配准方式,在一定程度上进行了模糊匹配,使得视觉车道线点云与高精地图车道线形点这两种分布不同的点云有更好的配准精度及更快的收敛速度,同时能够应对地图形点较为稀疏的场景。本技术采用的搜索方法充分利用了车道线的几何特性以及数据特性,减小了算法的计算量加快处理速度。本技术可用于视觉语义定位及其他需要视觉车道线与地图车道线配准的应用。
47、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本技术。
- 还没有人留言评论。精彩留言会获得点赞!