一种非平稳多目标运动参数的估计方法及装置与流程
本发明实施例涉及目标探测与识别,特别涉及一种非平稳多目标运动参数的估计方法及装置。
背景技术:
1、雷达目标探测与识别是目前传感器信息处理领域中的一个重要研究方向,通过对雷达回波信号的处理可获得目标的运动轨迹、速度、形状、尺寸、电磁参数等信息。较高精度的窄带测量结果是进行波门划分、宽带目标识别等技术的前提和基础,而较为精确的平动速度就可以为跟踪提供良好的初始参数,使跟踪算法对目标航迹能更快地收敛,降低丢失目标的可能性。
2、然而在采用雷达对空间目标进行探测时,一个波束内往往包含多个目标,且空间目标属于非平稳目标,其运动模型较为复杂,剧烈的微动和量级较高的平动之间会相互耦合干扰,进而影响目标参数估计的准确度。
3、现有技术中,常用的运动参数估计方法如快速傅里叶变换法(fft)、最大似然估计法等对多目标参数估计时会产生较大误差,难以估计得到准确结果。因此,有必要提供一种能够实现多目标非平稳待测目标运动参数的估计方法。
技术实现思路
1、基于现有技术中的运动参数估计方法难以实现非平稳多目标运动参数的准确估计,本发明实施例提供了一种非平稳多目标运动参数的估计方法及装置,该方法能够消除目标之间剧烈的微动和平动之间的相互耦合干扰,从而实现非平稳多目标运动参数的准确估计。
2、第一方面,本发明实施例提供了一种非平稳多目标运动参数的估计方法,包括:
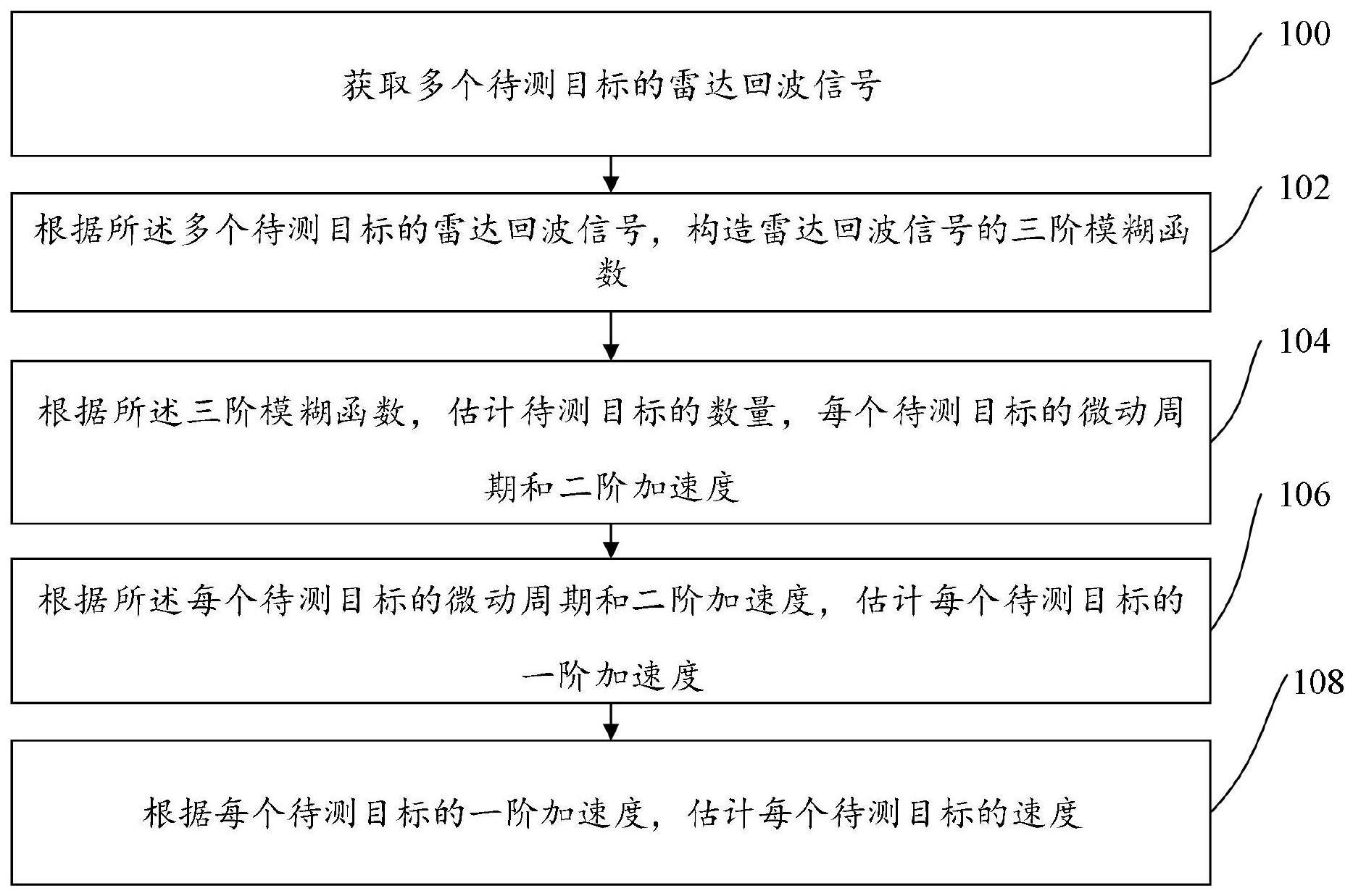
3、获取多个待测目标的雷达回波信号;
4、根据所述多个待测目标的雷达回波信号,构造雷达回波信号的三阶模糊函数;
5、根据所述三阶模糊函数,估计待测目标的数量,每个待测目标的微动周期和二阶加速度;
6、根据所述每个待测目标的微动周期和二阶加速度,估计每个待测目标的一阶加速度;
7、根据每个待测目标的一阶加速度,估计每个待测目标的速度。
8、优选的,所述雷达回波信号是通过以下公式计算得到的:
9、
10、其中,为所述雷达回波信号粗补偿之后的基带回波信号;δrti(tm)为包含所述多个待测目标的平动速度、一阶加速度和二阶加速度的高阶多项式,rmij(tm)为正弦周期信号,n为所述待测目标的数量,i为所述待测目标的编号,j为第i个待测目标的散射中心个数,λ为所述待测目标的雷达回波的波长,t为所述待测目标的雷达回波信号的脉冲时间间隔,一般为慢时间域,tm为所述待测目标的雷达回波信号的时域脉冲时间,一般为快时间域,si为第i个待测目标的散射中心个数,aij为第i个待测目标的第j个散射中心的散射强度。
11、优选的,所述根据所述多个待测目标的雷达回波信号,构造雷达回波信号的三阶模糊函数,包括:
12、根据所述多个待测目标的雷达回波信号,构造雷达回波信号的二阶模糊函数;
13、根据所述雷达回波信号的二阶模糊函数,得到所述雷达回波信号的三阶模糊函数。
14、优选的,所述雷达回波信号的二阶模糊函数是通过以下公式计算得到的:
15、p2(t,τ)=srm(t)×srm*(t-τ)
16、其中,p2(t,τ)为所述雷达回波信号的二阶模糊函数,srm(t)为t时刻所述雷达回波信号粗补偿之后的基带回波信号,srm*(t-τ)为t-τ时刻所述雷达回波信号粗补偿之后的基带回波信号,τ为延时时间;
17、所述雷达回波信号的三阶模糊函数是通过以下公式计算得到的:
18、
19、其中,p3(t,τ)为所述雷达回波信号的三阶模糊函数,srm(t)为t时刻所述雷达回波信号粗补偿之后的基带回波信号,为t+τ时刻所述雷达回波信号粗补偿之后的基带回波信号,srm(t+2τ)为t+2τ时刻所述雷达回波信号粗补偿之后的基带回波信号。
20、优选的,所述根据所述三阶模糊函数,估计待测目标的数量,每个待测目标的微动周期和二阶加速度,包括:
21、对所述三阶模糊函数进行傅里叶变换,得到傅里叶变换后的三阶模糊函数;
22、利用次峰值搜索的方式,估计待测目标的数量,所述每个待测目标的微动周期和二阶加速度;
23、傅里叶变换后的三阶模糊函数为:
24、xm(f,τ)=∫p3(t,τ)·e-j2πft
25、其中,j为虚数,f为频率,t为积分时间,p3(t,τ)为所述雷达回波信号的三阶模糊函数;
26、所述待测目标的数量,所述每个待测目标的微动周期和二阶加速度通过如下公式估计得到:
27、(fci,τi)=argmax{|xm(f,τ)|}
28、
29、
30、其中,(fci,τi)为所述待测目标的三阶模糊频域函数中的峰值出现的频率和时间值,xm(f,τ)为所述待测目标的三阶模糊频域函数,为第i个待测目标的微动周期,τi为第i个待测目标的延时时间,为第i个待测目标的二阶加速度,λ为所述待测目标的雷达回波的波长,fci为第i个待测目标估计的最大频率值,l为所述待测目标的横向尺寸。
31、优选的,所述每个待测目标的一阶加速度通过如下公式估计得到:
32、
33、
34、其中,为对第i个待测目标的二阶加速度进行补偿后的信号,sr(t)为所述待测目标的雷达原始回波信号,j为虚数,λ为所述待测目标的雷达回波的波长,为第i个待测目标的二阶加速度,t为时间,为第i个待测目标的一阶加速度,fi为估计的第i个待测目标的信号,为估计的第i个待测目标的信号,l为所述待测目标的横向尺寸。
35、优选的,所述每个待测目标的速度通过如下公式估计得到:
36、
37、其中,为补偿一阶加速度和二阶加速度的回波信号,sr(t)为所述待测目标的雷达原始回波信号,j为虚数,λ为所述待测目标的雷达回波的波长,ai1为第i个待测目标的一阶加速度,t为时间,为第i个目标的二阶加速度。
38、第二方面,本发明实施例还提供了一种非平稳多目标运动参数的估计装置,包括:
39、信号获取模块,用于获取多个待测目标的雷达回波信号;
40、函数构造模块,用于根据所述多个待测目标的雷达回波信号,构造雷达回波信号的三阶模糊函数;
41、第一计算模块,用于根据所述三阶模糊函数,估计待测目标的数量以及每个待测目标的微动周期和二阶加速度;
42、第二计算模块,用于根据所述每个待测目标的微动周期和二阶加速度,估计每个待测目标的一阶加速度;
43、第三计算模块,根据每个待测目标的一阶加速度,估计每个待测目标的速度。
44、第三方面,本发明实施例还提供了一种计算设备,包括存储器和处理器,所述存储器中存储有计算机程序,所述处理器执行所述计算机程序时,实现本说明书任一实施例所述的方法。
45、第四方面,本发明实施例还提供了一种计算机可读存储介质,其上存储有计算机程序,当所述计算机程序在计算机中执行时,令计算机执行本说明书任一实施例所述的方法。
46、本发明与现有技术相比具有以下有益效果:
47、本发明实施例提供了一种非平稳多目标运动参数的估计方法和装置,通过多个待测目标的雷达回波信号,构造雷达回波信号的三阶模糊函数,接着根据雷达回波信号的三阶模糊函数,估计待测目标的数量以及每个待测目标的微动周期和二阶加速度,再根据每个待测目标的微动周期和二阶加速度,分别估计每个待测目标相应的一阶加速度,最后根据每个待测目标的一阶加速,分别估计得到每个待测目标的速度参数。本发明通过多个雷达回波信号来构造关于雷达回波信号的三阶模糊函数,并依据三阶模糊函数分别得到每个待测目标的二阶加速度和微动周期,之后依次在每个待测目标的二阶加速度和一阶加速的基础之上估计得到相应多个目标的运动参数,从而消除了目标微动与平动之间的相互耦合干扰,进而实现了多个非平稳目标运动参数的准确估计。
- 还没有人留言评论。精彩留言会获得点赞!