一种多工况下轴承的状态监测与故障诊断方法
1.本发明属于故障检测技术领域,特别是涉及一种多工况下轴承的状态监测与故障诊断方法。
背景技术:
2.旋转机械设备广泛应用于航空航天、集成电路、铁路交通、工程机械等领域。为维持设备的安全运行,需要对主要零部件的健康状况进行实时监控,发生故障时需准确高效完成故障诊断。轴承作为旋转机械中最关键的零件,其故障在旋转机械故障中占比高达30%,因此对轴承状态进行监测与故障诊断非常重要。现有的轴承故障诊断方法主要针对单一工况,且用于故障识别的特征数量多,不符合设备的实际运行情况同时也给故障识别带来冗余量,增加计算量。因此亟需开发一种高效率、高准确率的针对多工况下轴承故障诊断的方法。
技术实现要素:
3.针对以上技术问题,本发明提供一种多工况下轴承的状态监测与故障诊断方法。
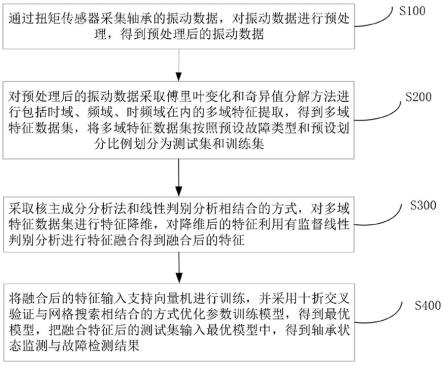
4.本发明解决其技术问题采用的技术方案是:一种多工况下轴承的状态监测与故障诊断方法,方法包括以下步骤:s100:通过扭矩传感器采集轴承的振动数据,对振动数据进行预处理,得到预处理后的振动数据;s200:对预处理后的振动数据采取傅里叶变化和奇异值分解方法进行包括时域、频域、时频域在内的多域特征提取,得到多域特征数据集,将多域特征数据集按照预设故障类型和预设划分比例划分为测试集和训练集;s300:采取核主成分分析法和线性判别分析相结合的方式,对多域特征数据集进行特征降维,对降维后的特征利用有监督线性判别分析进行特征融合得到融合后的特征;s400:将融合后的特征输入支持向量机进行训练,并采用十折交叉验证与网格搜索相结合的方式优化参数训练模型,得到最优模型,把融合特征后的测试集输入最优模型中,得到轴承状态监测与故障检测结果。
5.优选地,s100包括:s110:对振动数据采取重叠采样的方法进行数据增强得到增强后的振动数据,样本表示为,每个样本长度为,总样本个数为;s120:对增强后的振动数据用经验模态分解进行信号的去噪处理,得到一系列的固有模态分量函数imf,采取主成分分析法pca根据每个imf的方差贡献率选择保留的imf个数,得到去噪后的信号。
6.优选地,s110具体为:
其中,和分别代表第个样本和第个样本,为第个样本和第个样本之间的重叠量,为第个样本到第个样本之间的偏移量。
7.优选地,s120包括:s121:对增强后的振动数据用经验模态分解进行信号的去噪处理,得到一系列的固有模态分量函数;s122:从固有模态分量函数中采取主成分分析法pca计算每个imf的方差贡献率,对每个imf的方差贡献率按照从大到小进行排序,保留前预设数量的imf个数,得到去噪后的信号。
8.优选地,s121中对信号进行经验模态分解得到imf,具体为:其中,为原始信号,为分解得到的imf,数量为,为分解得到的残差信号;s122中采用主成分分析法计算每个imf的方差贡献率,对每个imf的方差贡献率按照从大到小进行排序,保留前预设数量的imf个数,具体为:照从大到小进行排序,保留前预设数量的imf个数,具体为:照从大到小进行排序,保留前预设数量的imf个数,具体为:其中,为由经验模态分解得到的原始imf个数,为用主成分分析法筛选后得到的imf个数,为由原始imf组成的矩阵,维度为维,矩阵为由矩阵去中心化后得到的矩阵,为的协方差矩阵,为协方差矩阵的特征值,且,为所对应的特征向量,为第个主成分的方差贡献率,为由筛选后得到的imf组成的矩阵。
9.优选地,s200包括:步骤s210:对去噪后的信号进行时域特征提取,包括最大值、最小值、平均值、方差、标准差、中值、偏度和峰度:最大值:最小值:
平均值:方差:标准差:中值:偏度:峰度:步骤s220:利用傅里叶变换方法进行频域特征提取,包括重心频率、均方频率、均方根频率、频率方差和频域标准差:重心频率:均方频率:均方根频率:频率方差:频率标准差:其中,为频率幅值大小,为功率谱值;步骤s230:利用奇异值分解方法进行时频域特征提取,包括功率谱熵、奇异谱熵和时域能量熵:功率谱熵:功率谱熵:奇异谱熵:奇异谱熵:奇异谱熵:其中,为阶正交矩阵,为阶正交矩阵,为的转置,为半正定的阶的对角矩阵,对角线上的元素就是奇异值;
时域能量熵:时域能量熵:步骤s240:提取多域特征构造多域特征数据集,将多域特征数据集按照预设故障种类以及预设划分比例划分为测试集跟训练集。
10.优选地,s300包括:步骤s310:对多域特征数据集采取核主成分分析进行初步降维,具体为:步骤s310:对多域特征数据集采取核主成分分析进行初步降维,具体为:步骤s310:对多域特征数据集采取核主成分分析进行初步降维,具体为:步骤s310:对多域特征数据集采取核主成分分析进行初步降维,具体为:步骤s310:对多域特征数据集采取核主成分分析进行初步降维,具体为:步骤s310:对多域特征数据集采取核主成分分析进行初步降维,具体为:步骤s310:对多域特征数据集采取核主成分分析进行初步降维,具体为:其中,为原始多域特征,共个样本,每个样本维,将特征点引入非线性映射后的高维特征点,为映射后特征的均值,为核函数矩阵,为核函数矩阵的特征值,且,为所对应的特征向量,为累计主元贡献率,为降维后的特征,维度为;步骤s320:对类样本的特征集用有监督线性判别分析进行特征融合,具体为:征融合,具体为:征融合,具体为:
其中,为第类样本的第个特征,为样本类内散度矩阵,为样本类间散度矩阵,为最佳投影矩阵;令,由拉格朗日乘法算子可得,最佳投影矩阵等价于:其中,和分别为矩阵的特征值和特征向量,且;融合后的特征为,融合后特征为维。
11.优选地,s400包括:步骤s410:将融合得到的维特征输入支持向量机svm中进行训练,构建svm算法:设置输入样本为,与其对应的输出样本为;选取核函数;设置约束条件和,求解函数的最大值,得到最优值;计算,的第一分量用于表示最佳偏执,得到最优决策平面;求解决策函数来确定输入样本的类型;步骤s420:采用网格搜索法与十折交叉验证优化支持向量机的参数,得到最优模型,将融合特征后的测试集输入最优模型得出状态监测与故障检测结果,具体为:给支持向量机的参数设置一组候选参数,将参数两两组合组成一个二维网格,遍历网格中所有节点,选出最优解;随机将训练集切分成10个互不相交、大小相同的子集,用9个子集的数据集训练优化参数后的模型,余下的子集测试模型,重复10次,选出平均测试误差最小的模型作为最优模型,将融合特征后的测试集输入最优模型,得到状态监测与故障检测的结果。
12.上述一种多工况下轴承的状态监测与故障诊断方法,通过扭矩传感器采集多工况
下轴承振动数据并进行预处理;然后对预处理后的振动数据用经验模态分解,得到一系列的固有模态分量函数(imf),再用主成分分析对固有模态分量函数进行筛选;对筛选得到的imf进行包括时域、频域、时频域在内的多域特征提取,并按照故障类型划分为测试集跟训练集;根据所提取到的特征进行特征融合;将融合后的特征输入支持向量机进行模式识别,得到轴承的工作状态,若出现故障进一步判定是哪种故障。利用从振动信号中分解得到的imf,从中提取多域特征进行特征融合,将融合的特征输入支持向量机就能实现多工况下轴承的状态监测与故障诊断,故障识别准确率高,故障样本数量较少的情况下也能达到高准确率。
附图说明
13.图1为本发明一实施例提供的一种多工况下轴承的状态监测与故障诊断方法流程图;图2为本发明一实施例提供的训练集和测试集的混淆矩阵图,其中,图2(a)为训练集的混淆矩阵图,图2(b)为测试集的混淆矩阵图。
具体实施方式
14.为了使本技术领域的人员更好地理解本发明的技术方案,下面结合附图对本发明作进一步的详细说明。
15.在一个实施例中,如图1所示,一种多工况下轴承的状态监测与故障诊断方法,方法包括以下步骤:s100:通过扭矩传感器采集轴承的振动数据,对振动数据进行预处理,得到预处理后的振动数据。
16.s200:对预处理后的振动数据采取傅里叶变化和奇异值分解方法进行包括时域、频域、时频域在内的多域特征提取,得到多域特征数据集,将多域特征数据集按照预设故障类型和预设划分比例划分为测试集和训练集。
17.具体地,比如数据集里故障类型1、故障类型2
…
各有100条数据,按照故障类型把故障1的70%以及故障2的70%划分成训练集,剩余的30%划分成测试集。
18.s300:采取核主成分分析法和线性判别分析相结合的方式,对多域特征数据集进行特征降维,对降维后的特征利用有监督线性判别分析进行特征融合得到融合后的特征。
19.s400:将融合后的特征输入支持向量机进行训练,并采用十折交叉验证与网格搜索相结合的方式优化参数训练模型,得到最优模型,把融合特征后的测试集输入最优模型中,得到轴承状态监测与故障检测结果。
20.上述一种多工况下轴承的状态监测与故障诊断方法,通过扭矩传感器采集多工况下轴承振动数据并进行预处理;然后对预处理后的振动数据用经验模态分解,得到一系列的固有模态分量函数(imf),再用主成分分析对固有模态分量函数进行筛选;对筛选得到的imf进行包括时域、频域、时频域在内的多域特征提取,并按照故障类型划分为测试集跟训练集;根据所提取到的特征进行特征融合;将融合后的特征输入支持向量机进行模式识别,得到轴承的工作状态,若出现故障进一步判定是哪种故障。利用从振动信号中分解得到的imf,从中提取多域特征进行特征融合,将融合的特征输入支持向量机就能实现多工况下轴
承的状态监测与故障诊断,故障识别准确率高,故障样本数量较少的情况下也能达到高准确率。
21.在一个实施例中,s100包括:s110:对振动数据采取重叠采样的方法进行数据增强得到增强后的振动数据,样本表示为,每个样本长度为,总样本个数为;s120:对增强后的振动数据用经验模态分解进行信号的去噪处理,得到一系列的固有模态分量函数imf,采取主成分分析法pca根据每个imf的方差贡献率选择保留的imf个数,得到去噪后的信号。
22.在一个实施例中,s110具体为:其中,和分别代表第个样本和第个样本,为第个样本和第个样本之间的重叠量,为第个样本到第个样本之间的偏移量。
23.具体地,针对故障样本少的数据先进行数据增强,与其他故障诊断方法相比较,本发明提出的故障诊断方法可用于多工况下的轴承故障诊断,且用于识别的特征维数较少,算法计算量少、准确率高、可实施性强。
24.在一个实施例中,s120包括:s121:对增强后的振动数据用经验模态分解进行信号的去噪处理,得到一系列的固有模态分量函数;s122:从固有模态分量函数中采取主成分分析法pca计算每个imf的方差贡献率,对每个imf的方差贡献率按照从大到小进行排序,保留前预设数量的imf个数,得到去噪后的信号。
25.在一个实施例中,s121中对信号进行经验模态分解得到imf,具体为:其中,为原始信号,为分解得到的imf,数量为,为分解得到的残差信号;s122中采用主成分分析法计算每个imf的方差贡献率,对每个imf的方差贡献率按照从大到小进行排序,保留前预设数量的imf个数,具体为:照从大到小进行排序,保留前预设数量的imf个数,具体为:照从大到小进行排序,保留前预设数量的imf个数,具体为:
其中,为由经验模态分解得到的原始imf个数,为用主成分分析法筛选后得到的imf个数,为由原始imf组成的矩阵,维度为维,矩阵为由矩阵去中心化后得到的矩阵,为的协方差矩阵,为协方差矩阵的特征值,且,为所对应的特征向量,为第个主成分的方差贡献率,为由筛选后得到的imf组成的矩阵。
26.具体地,对振动信号用经验模态分解进行预处理,得到个imf后,采用主成分分析法根据imf的方差贡献率选择保留的imf个数,最终保留的个数为,且。
27.在一个实施例中,s200包括:步骤s210:对去噪后的信号进行时域特征提取,包括最大值、最小值、平均值、方差、标准差、中值、偏度和峰度:最大值:最小值:平均值:方差:标准差:中值:偏度:峰度:步骤s220:利用傅里叶变换方法进行频域特征提取,包括重心频率、均方频率、均方根频率、频率方差和频域标准差:重心频率:均方频率:均方根频率:频率方差:
频率标准差:其中,为频率幅值大小,为功率谱值;步骤s230:利用奇异值分解方法进行时频域特征提取,包括功率谱熵、奇异谱熵和时域能量熵:功率谱熵:功率谱熵:奇异谱熵:奇异谱熵:奇异谱熵:其中,为阶正交矩阵,为阶正交矩阵,为的转置,为半正定的阶的对角矩阵,对角线上的元素就是奇异值;时域能量熵:时域能量熵:步骤s240:提取多域特征构造多域特征数据集,将多域特征数据集按照预设故障种类以及预设划分比例划分为测试集跟训练集。
28.在一个实施例中,s300包括:步骤s310:对多域特征数据集采取核主成分分析进行初步降维,具体为:步骤s310:对多域特征数据集采取核主成分分析进行初步降维,具体为:步骤s310:对多域特征数据集采取核主成分分析进行初步降维,具体为:步骤s310:对多域特征数据集采取核主成分分析进行初步降维,具体为:步骤s310:对多域特征数据集采取核主成分分析进行初步降维,具体为:步骤s310:对多域特征数据集采取核主成分分析进行初步降维,具体为:步骤s310:对多域特征数据集采取核主成分分析进行初步降维,具体为:
其中,为原始多域特征,共个样本,每个样本维,将特征点引入非线性映射后的高维特征点,为映射后特征的均值,为核函数矩阵,为核函数矩阵的特征值,且,为所对应的特征向量,为累计主元贡献率,为降维后的特征,维度为;步骤s320:对类样本的特征集用有监督线性判别分析进行特征融合,具体为:特征融合,具体为:特征融合,具体为:特征融合,具体为:特征融合,具体为:特征融合,具体为:其中,为第类样本的第个特征,为样本类内散度矩阵,为样本类间散度矩阵,为最佳投影矩阵;令,由拉格朗日乘法算子可得,最佳投影矩阵等价于:其中,和分别为矩阵的特征值和特征向量,且;融合后的特征为,融合后特征为维。
29.在一个实施例中,s400包括:步骤s410:将融合得到的维特征输入支持向量机svm中进行训练,构建svm算法:设置输入样本为,与其对应的输出样本为;选取核函数;
设置约束条件和,求解函数的最大值,得到最优值;计算,的第一分量用于表示最佳偏执,得到最优决策平面;求解决策函数来确定输入样本的类型;步骤s420:采用网格搜索法与十折交叉验证优化支持向量机的参数,得到最优模型,将融合特征后的测试集输入最优模型得出状态监测和故障检测结果,具体为:给支持向量机的参数设置一组候选参数,将参数两两组合组成一个二维网格,遍历网格中所有节点,选出最优解;随机将训练集切分成10个互不相交、大小相同的子集,用9个子集的数据集训练优化参数后的模型,余下的子集测试模型,重复10次,选出平均测试误差最小的模型作为最优模型,将融合特征后的测试集输入最优模型,得到状态监测和故障检测的结果。
30.具体地,输入样本的类型实际上为轴承的工作状态,包括正常和几种故障类型,比如是正常工作状态还是发生了故障1或者故障2等,为初步的状态监测和故障检测结果,再通过网格搜索法与十折交叉验证进一步优化支持向量机的参数,提高状态监测和故障检测的准确性。
31.在一个详细的实施例中,本发明搭建包含一个扭矩传感器,一个1马力和2马力的电动机,一个功率测试计,和电子控制器的实验平台进行轴承振动数据的采集。试验对象为驱动端轴承,被诊断的轴承型号为深沟轴承skf6205,有故障的轴承由电火花加工制作而成,系统的采样频率为 12khz。被诊断的轴承一共有 3 种缺陷位置,分别是滚动体损伤,外圈损伤与内圈损伤,损伤直径的大小分别为包括 0.007英尺,0.014英尺和 0.021英尺,共计9 种损伤状态。负载包括0负载,1hp负载和2hp负载,共计三种工况。每种工况下的不同故障均采集80条数据,共2160条故障样本数据;正常状态80条数据,总计2240条数据,其中70%用作训练集,30%用作测试集,训练集和测试集的混淆矩阵如图2,其中,图2(a)为训练集的混淆矩阵图,图2(b)为测试集的混淆矩阵图。
32.上述轴承状态监测与故障诊断方法,与其他故障检测方法相比较,本发明提出的故障检测方法最后所需特征维数明显减少,且可以对多工况故障进行检测,针对故障信息的高维非线性用本发明的特征降维的方法减少冗余量,在很大程度上减小了计算负担,在多工况和故障样本少的情况下准确率也能高达99%以上。
33.以上对本发明所提供的一种多工况下轴承的状态监测与故障诊断方法进行了详细介绍。本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的核心思想。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以对本发明进行若干改进和修饰,这些改进和修饰也落入本发明权利要求的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1