一种利用激光雷达进行建筑物数字建模的方法与流程
本发明属于数据处理,具体涉及一种利用激光雷达进行建筑物数字建模的方法。
背景技术:
1、随着计算机技术的不断发展,对于建筑物进行数字建模的需求也变得越来越多,现有技术一般通过飞行器搭载激光雷达扫描建筑物的表面,来获取建筑物的表面形状的三维点云,从而根据三维点云完成对于建筑物的数字建模,同时,现有技术还一般通过飞行器搭载摄像装置,来拍摄建筑物的表面图像,进而将建筑物的表面图像附着到建筑物的模型表面,最后得到真实感强的建筑物模型,然而,现有技术在进行建筑物的数字建模时,较多需要人工参与,举例如预处理三维点云、分类处理三维点云等,不仅使得数字建模花费大量的人工成本,而且还导致数字建模的效率较低,针对该技术问题本发明提出一种利用激光雷达进行建筑物数字建模的方法。
技术实现思路
1、本发明通过激光雷达获取建筑物表面形状的三维点云,通过摄像装置获取建筑物表面图像,同时对于三维点云进行预处理来降低需要处理的三维坐标点的总数量,从而提高建模效率,并且提供分类处理预处理后的三维点云的方法,确保不同类别的三维点云的准确度,还针对不同类别的三维点云的建筑物模型进行逼真处理,增强建筑物模型的真实感。
2、为了达到上述的发明目的,本发明给出如下所述的一种利用激光雷达进行建筑物数字建模的方法,主要包括以下的步骤:
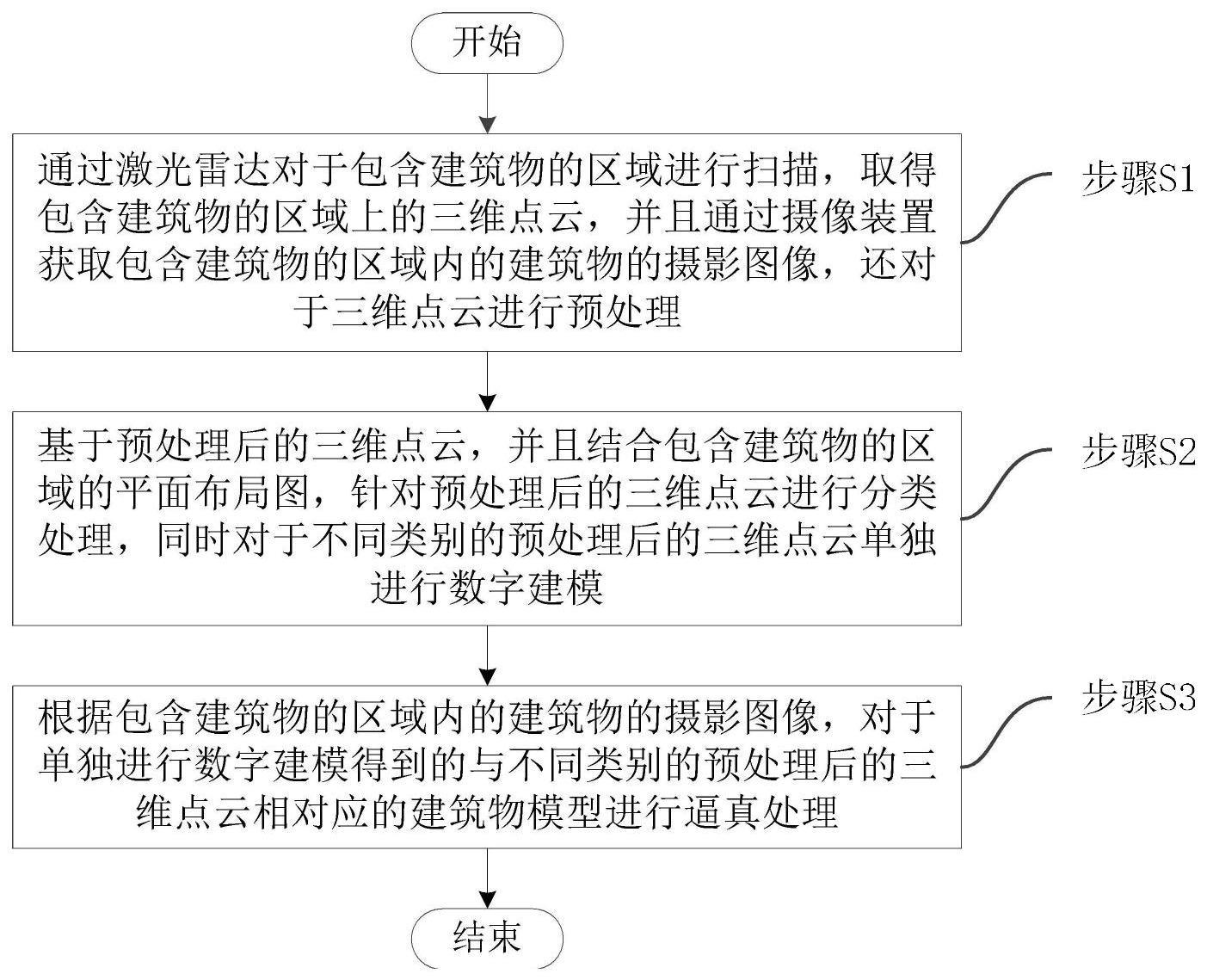
3、步骤s1、通过激光雷达对于包含建筑物的区域进行扫描,取得包含建筑物的区域上的三维点云,所述三维点云包括表示包含建筑物的区域内的建筑物的表面形状的三维坐标点,并且通过摄像装置获取包含建筑物的区域内的建筑物的摄影图像,还对于包含建筑物的区域上的所述三维点云进行预处理;
4、步骤s2、基于所述预处理后的所述三维点云,并且结合包含建筑物的区域的平面布局图,针对所述预处理后的所述三维点云进行分类处理,同时对于不同类别的所述预处理后的所述三维点云单独进行数字建模;
5、步骤s3、根据包含建筑物的区域内的建筑物的所述摄影图像,对于单独进行数字建模得到的与不同类别的所述预处理后的所述三维点云相对应的建筑物模型进行逼真处理。
6、作为本发明的一种优选技术方案,对于包含建筑物的区域上的所述三维点云进行所述预处理,包括如下步骤:
7、步骤s11、计算所述三维点云中的全部的三维坐标点的总数量,同时设置所述预处理后的所述三维点云中的全部的三维坐标点的期望总数量,并且计算所述期望总数量占所述总数量的比例值;
8、步骤s12、在由所述三维点云形成的整个空间中,将所述整个空间划分为相等的第一空间和第二空间,从而将所述三维点云划分为属于第一空间的三维坐标点,以及属于第二空间的三维坐标点;
9、步骤s13、针对属于第一空间的三维坐标点和属于第二空间的三维坐标点,分别计算第一空间中的三维坐标点的数量与所述比例值的乘积,以及第二空间中的三维坐标点的数量与所述比例值的乘积,并且判断乘积值是否小于等于预先设定的乘积阈值;
10、步骤s14、当乘积满足小于等于预先设定的乘积阈值时,在相应的空间中随机去除掉一部分三维坐标点,同时停止对于相应的空间的划分,当乘积不满足小于等于预先设定的乘积阈值时,继续将相应的空间划分为相等的第一空间和第二空间,并且重复执行所述步骤s13和所述步骤s14。
11、作为本发明的一种优选技术方案,在相应的空间中随机去除掉的一部分三维坐标点的数量为,相应的空间中的全部的三维坐标点的数量减去相应的空间中的全部的三维坐标点的数量与所述比例值的乘积的结果值。
12、作为本发明的一种优选技术方案,针对所述预处理后的所述三维点云进行分类处理,包括如下步骤:
13、步骤s21、将包含建筑物的区域的所述平面布局图中的图形在所述预处理后的所述三维点云的底部平面上与所述预处理后的所述三维点云进行对准,并且沿着所述底部平面的竖直向上的法线方向向上平移所述图形;
14、步骤s22、在位于所述图形内的所述预处理后的所述三维点云中,确定最高的三维坐标点,同时形成最高的三维坐标点所在的并且和所述底部平面互相平行的顶部平面,还将由所述图形,所述底部平面,以及所述顶部平面所规定的空间范围内的三维坐标点划分为同一个类别,为同一个类别中的每个三维坐标点设置一个类别标识;
15、步骤s23、针对所述预处理后的所述三维点云中的带有所述类别标识的全部的三维坐标点,依次计算每个三维坐标点与其他三维坐标点之间的距离,当距离小于等于预先设定的距离阈值时,使用每个三维坐标点的所述类别标识修正其他三维坐标点的所述类别标识。
16、作为本发明的一种优选技术方案,所述距离阈值大于所述预处理后的所述三维点云中的相邻两个三维坐标点之间的距离的平均值,同时又小于相邻两个不同类别的所述预处理后的所述三维点云之间的距离的平均值。
17、作为本发明的一种优选技术方案,对于单独进行数字建模得到的与不同类别的所述预处理后的所述三维点云相对应的建筑物模型进行逼真处理,包括如下步骤:
18、步骤s31、针对单独进行数字建模得到的与不同类别的所述预处理后的所述三维点云相对应的建筑物模型,提取建筑物模型的三维形状,对于包含建筑物的区域内的建筑物的所述摄影图像分别进行图像处理,并且分别提取所述摄影图像的二维形状;
19、步骤s32、分别获取建筑物模型的三维形状在xoy坐标平面,xoz坐标平面,zoy坐标平面上的第一投影图形,第二投影图形,以及第三投影图形;
20、步骤s33、基于建筑物模型的第一投影图形,先计算第一投影图形和所述摄影图像的二维形状的相似度得到第一相似度,并且对于建筑物模型的第一投影图形进行一次左右翻转,再计算左右翻转后的第一投影图形和所述摄影图像的二维形状的相似度得到第二相似度,还从第一相似度和第二相似度中选择较大的同时大于相似度阈值的相应的相似度;
21、步骤s34、对于建筑物模型的第二投影图形和建筑物模型的第三投影图形,分别通过与所述步骤s33相同的方法,以分别取得建筑物模型的第二投影图形的相应的相似度,以及建筑物模型的第三投影图形的相应的相似度,再结合建筑物模型的第一投影图形的相应的相似度,将与最大的相应的相似度相对应的所述摄影图像的一部分附着到建筑物模型的表面。
22、本发明还提供一种利用激光雷达进行建筑物数字建模的系统,包括如下模块:
23、预处理模块,用于通过激光雷达对于包含建筑物的区域进行扫描,取得包含建筑物的区域上的三维点云,三维点云包括表示包含建筑物的区域内的建筑物的表面形状的三维坐标点,并且通过摄像装置获取包含建筑物的区域内的建筑物的摄影图像,还用于对包含建筑物的区域上的三维点云进行预处理;
24、建模模块,用于基于预处理后的三维点云,并且结合包含建筑物的区域的平面布局图,针对预处理后的三维点云进行分类处理,同时对于不同类别的预处理后的三维点云单独进行数字建模得到建筑物模型;
25、后处理模块,用于根据包含建筑物的区域内的建筑物的摄影图像,对于单独进行数字建模得到的与不同类别的预处理后的三维点云相对应的建筑物模型进行逼真处理。
26、与现有技术相比,本发明的有益效果至少如下所述:
27、1、在本发明中,首先通过激光雷达对于包含建筑物的区域进行扫描,取得包含建筑物的区域上的三维点云,并且通过摄像装置获取包含建筑物的区域内的建筑物的摄影图像,还对于包含建筑物的区域上的三维点云进行预处理;其次基于预处理后的三维点云,并且结合包含建筑物的区域的平面布局图,针对预处理后的三维点云进行分类处理,同时对于不同类别的预处理后的三维点云单独进行数字建模;最后根据包含建筑物的区域内的建筑物的摄影图像,对于单独进行数字建模得到的与不同类别的预处理后的三维点云相对应的建筑物模型进行逼真处理。
28、2、本发明解决了现有技术在进行建筑物的数字建模时,较多需要人工参与,不仅使得数字建模花费大量的人工成本,而且还导致数字建模的效率较低的问题,本发明对通过激光雷达得到的三维点云进行预处理,降低了数字建模需要处理的数据量,提高数字建模的效率,并且本发明能够对于三维点云自动进行分类处理,确保不同类别的三维点云的准确率,同时本发明还能够对建筑物模型进行逼真处理,增强建筑物模型的真实感。
- 还没有人留言评论。精彩留言会获得点赞!