一种基于人工智能的煤量识别的方法及系统与流程
1.本发明涉及数据处理领域,具体地,涉及一种基于人工智能的煤量识别的方法及系统。
背景技术:
2.目前,国内外对于煤矿领域的矿用胶带机智能调速系统所采用的技术核心是煤量识别,传统的煤量识别主要通过称重传感器实现,存在灵敏度低、抗干扰性差等问题。人工智能在识别、检测等方面具有很大优势,将人工智能与煤量识别相结合,研究设计一种对煤量识别进行优化的方法,具有十分重要的意义。
3.现有技术中,存在针对煤量识别的灵敏度低、抗干扰性差,进而造成煤量识别效果不佳的技术问题。
技术实现要素:
4.本技术提供了一种基于人工智能的煤量识别的方法及系统。解决了现有技术中针对煤量识别的灵敏度低、抗干扰性差,进而造成煤量识别效果不佳的技术问题。达到了提高煤量识别的灵敏度、抗干扰性,实现智能化、精准性、高效化的煤量识别,提升煤量识别质量的技术效果。
5.鉴于上述问题,本技术提供了一种基于人工智能的煤量识别的方法及系统。
6.第一方面,本技术提供了一种基于人工智能的煤量识别的方法,其中,所述方法应用于一种基于人工智能的煤量识别的系统,所述方法包括:采集获得监测传送带的基础信息,基于所述基础信息布设所述摄像头和所述深度相机,并根据布设结果构建拍摄图像关联关系;通过所述摄像头进行所述监测传送带的图像采集,获得采集图像;通过卷积神经网络对所述采集图像进行煤量识别,生成煤量标识等级数据;基于拍摄图像关联关系通过所述深度相机进行所述监测传送带的深度信息采集,获得深度点云数据;基于所述深度点云数据计算获得煤量切面面积,并将所述煤量切面面积转化获得煤量百分比;判断所述煤量百分比是否在所述煤量标识等级数据的区间内,当所述煤量百分比在所述煤量标识等级数据的区间内时,则输出所述煤量百分比。
7.第二方面,本技术还提供了一种基于人工智能的煤量识别的系统,其中,所述系统包括:关联关系构建模块,所述关联关系构建模块用于采集获得监测传送带的基础信息,基于所述基础信息布设所述摄像头和所述深度相机,并根据布设结果构建拍摄图像关联关系;图像采集模块,所述图像采集模块用于通过所述摄像头进行所述监测传送带的图像采集,获得采集图像;煤量识别模块,所述煤量识别模块用于通过卷积神经网络对所述采集图像进行煤量识别,生成煤量标识等级数据;深度信息采集模块,所述深度信息采集模块用于基于拍摄图像关联关系通过所述深度相机进行所述监测传送带的深度信息采集,获得深度点云数据;煤量转化模块,所述煤量转化模块用于基于所述深度点云数据计算获得煤量切面面积,并将所述煤量切面面积转化获得煤量百分比;煤量输出模块,所述煤量输出模块用
于判断所述煤量百分比是否在所述煤量标识等级数据的区间内,当所述煤量百分比在所述煤量标识等级数据的区间内时,则输出所述煤量百分比。
8.本技术中提供的一个或多个技术方案,至少具有如下技术效果或优点:通过监测传送带的基础信息布设摄像头和深度相机,并根据布设结果构建拍摄图像关联关系;通过摄像头进行监测传送带的图像采集,获得采集图像;通过卷积神经网络对采集图像进行煤量识别,生成煤量标识等级数据;通过深度相机进行监测传送带的深度信息采集,获得深度点云数据;基于深度点云数据计算获得煤量切面面积,并将煤量切面面积转化为煤量百分比;判断煤量百分比是否在煤量标识等级数据的区间内,当煤量百分比在煤量标识等级数据的区间内时,则输出煤量百分比。达到了提高煤量识别的灵敏度、抗干扰性,实现智能化、精准性、高效化的煤量识别,提升煤量识别质量的技术效果。
9.上述说明仅是本技术技术方案的概述,为了能够更清楚了解本技术的技术手段,而可依照说明书的内容予以实施,并且为了让本技术的上述和其它目的、特征和优点能够更明显易懂,以下特举本技术的具体实施方式。
附图说明
10.为了更清楚地说明本公开实施例的技术方案,下面将对本公开实施例的附图作简单地介绍。明显地,下面描述中的附图仅仅涉及本公开的一些实施例,而非对本公开的限制。
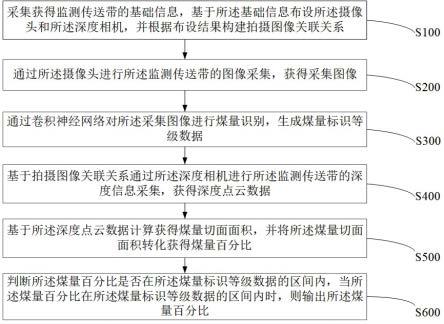
11.图1为本技术一种基于人工智能的煤量识别的方法的流程示意图;图2为本技术一种基于人工智能的煤量识别的方法中构建卷积神经网络的流程示意图;图3为本技术一种基于人工智能的煤量识别的方法中完成卷积神经网络的训练的流程示意图;图4为本技术一种基于人工智能的煤量识别的系统的结构示意图。
12.附图标记说明:关联关系构建模块11,图像采集模块12,煤量识别模块13,深度信息采集模块14,煤量转化模块15,煤量输出模块16。
具体实施方式
13.本技术通过提供一种基于人工智能的煤量识别的方法及系统。解决了现有技术中针对煤量识别的灵敏度低、抗干扰性差,进而造成煤量识别效果不佳的技术问题。达到了提高煤量识别的灵敏度、抗干扰性,实现智能化、精准性、高效化的煤量识别,提升煤量识别质量的技术效果。
14.实施例一请参阅附图1,本技术提供一种基于人工智能的煤量识别的方法,其中,所述方法应用于一种基于人工智能的煤量识别的系统,所述系统与摄像头、深度相机、光测定装置通信连接,所述方法具体包括如下步骤:步骤s100:采集获得监测传送带的基础信息,基于所述基础信息布设所述摄像头和所述深度相机,并根据布设结果构建拍摄图像关联关系;步骤s200:通过所述摄像头进行所述监测传送带的图像采集,获得采集图像;
具体而言,对监测传送带进行信息采集,获得监测传送带的基础信息。进而,按照基础信息对监测传送带进行摄像头、深度相机的布设,获得布设结果,并对布设结果进行分析,获得拍摄图像关联关系。利用摄像头对监测传送带进行图像采集,获得采集图像。其中,所述监测传送带可以为使用所述一种基于人工智能的煤量识别的系统进行智能化煤量识别的任意煤矿胶带运输传送带。所述基础信息包括监测传送带的结构组成、长度参数、厚度参数、弯曲半径等基础参数。所述摄像头可以为现有技术中任意类型的能够采集获取图像信息的摄像装置或它们的结合。所述深度相机可以为现有技术中的tof相机。所述布设结果包括摄像头布设位置参数、深度相机布设位置参数。示例性地,摄像头布设位置参数可以为将摄像头安装于监测传送带任意部位,同时,为确保煤量识别的准确性,摄像头与监测传送带之间的夹角应保持在45
°
至60
°
之间。深度相机布设位置参数包括将深度相机安装于监测传送带上方16cm至1100cm位置,深度相机垂直向下照射。所述拍摄图像关联关系包括布设结果中摄像头布设位置参数、深度相机布设位置参数与拍摄图像之间的对应关系。所述采集图像包括摄像头采集的监测传送带的图像数据信息。达到了按照基础信息对监测传送带进行摄像头、深度相机的布设,并通过摄像头进行监测传送带的图像采集,获得采集图像,为后续对采集图像进行煤量识别奠定基础的技术效果。
15.步骤s300:通过卷积神经网络对所述采集图像进行煤量识别,生成煤量标识等级数据;进一步的,如附图2所示,本技术步骤s300还包括:步骤s310:通过所述摄像头进行所述监测传送带的视频采集,获得视频数据;步骤s320:将所述视频数据切分成帧图片;步骤s330:基于标注平台进行所述帧图片的全部图像标注,且标注结果包括多个煤量等级;步骤s340:对标注后的帧图片进行尺寸和灰度处理,并划分为训练集和验证集;具体而言,利用摄像头对监测传送带进行视频采集,获得视频数据,并对视频数据进行切分,获得帧图片。所述视频数据包括一段时间内监测传送带从空载至满载的全过程视频信息。所述帧图片包括多张图片数据,多张图片数据包括监测传送带从空载至满载全过程中的各种形态下的煤量数据。进一步,通过标注平台对帧图片中每张图片数据中进行标注,获得标注结果。所述标注平台包括于所述一种基于人工智能的煤量识别的系统,具有对输入的帧图片进行煤量等级标注的功能。所述标注结果包括帧图片中每张图片数据对应的煤量等级。示例性地,标注结果包括a、b、c、d四个煤量等级,其中a为煤量最少,d为煤量最多。进而,对标注后的帧图片进行尺寸和灰度处理,即对标注后的帧图片进行尺寸统一、灰度调整,获得标准帧图片数据,并对标准帧图片数据进行划分,获得训练集、验证集。所述标准帧图片数据包括尺寸统一、灰度统一的标注后的帧图片。例如,所述标准帧图片数据包括灰度为128*128的标注后的帧图片。所述训练集包括标准帧图片数据中80%的图片数据。所述验证集包括标准帧图片数据中20%的图片数据。达到了通过摄像头对监测传送带进行视频采集,获得视频数据,并对视频数据进行多级处理,获得训练集、验证集,为后续构建卷积神经网络夯实基础的技术效果。
16.步骤s350:基于所述训练集和所述验证集构建所述卷积神经网络。
17.其中,所述卷积神经网络包括图像输入层、卷积层、光栅化、多层感知器,且所述卷
积神经网络通过mxnet深度学习框架进行模型训练。
18.进一步的,如附图3所示,本技术步骤s350还包括:步骤s351:采集获得所述卷积神经网络的精确率参数和召回率参数;步骤s352:获得的所述精确率参数和召回率参数的调和均值;步骤s353:当所述调和均值满足预设阈值时,则完成所述卷积神经网络的训练。
19.具体而言,基于mxnet深度学习框架,将训练集进行不断的自我训练学习至收敛状态,获得卷积神经网络,即,当调和均值满足预设阈值时,完成卷积神经网络的训练。继而,将验证集作为输入信息,输入卷积神经网络,从而对卷积神经网络进行验证、参数更新。进一步,将采集图像作为输入信息,输入卷积神经网络,获得煤量标识等级数据。
20.其中,所述mxnet深度学习框架为现有技术中的mxnet软件。mxnet软件是一个深度学习库,可以对输入的训练集进行高效、灵活的深度学习。示例性地,所述训练集包括a个训练帧图片数据,以及a个训练帧图片数据对应的a个标注煤量等级。在利用mxnet深度学习框架对训练集中的a个训练帧图片数据进行训练学习时,获得mxnet深度学习框架输出b个样本标注煤量等级。a个训练帧图片数据中存在部分未被识别出的训练帧图片数据,未被识别出的训练帧图片数据对应e个标注煤量等级。且,e+b=a。将b个样本标注煤量等级与a个标注煤量等级进行比对,发现b个样本标注煤量等级中存在c个正确样本标注煤量等级,以及d个错误样本标注煤量等级,且c+d=b。将c与b的比值设置为精确率参数,将c与a的比值设置为召回率参数。进一步,分别对精确率参数、召回率参数进行倒数运算,获得精确率倒数、召回率倒数;对精确率倒数、召回率倒数进行平均值计算,获得平均值计算结果,将平均值计算结果的倒数输出为调和均值。所述预设阈值包括预先设置确定的调和均值的阈值参数,预设阈值可由mxnet深度学习框架自适应设置确定。所述卷积神经网络包括图像输入层、卷积层、光栅化、多层感知器。光栅化广泛应用于深度学习卷积神经网络的结构中,光栅化用于将图像数据转化为一个个栅格组成的图像信息。多层感知器是一个正向传播的神经网络,多层感知器可将输入的多个数据集映射到单一的输出的数据集上。所述煤量标识等级数据包括采集图像对应的煤量等级信息。达到了通过卷积神经网络对采集图像进行煤量识别,获得可靠的煤量标识等级数据,提高煤量识别的灵敏度、精准性的技术效果。
21.步骤s400:基于拍摄图像关联关系通过所述深度相机进行所述监测传送带的深度信息采集,获得深度点云数据;进一步的,本技术步骤s400还包括:步骤s410:通过所述光测定装置进行深度采样位置的环境光数据采集,获得环境光数据集合;步骤s420:判断所述环境光数据集合是否满足预设光强阈值;步骤s430:当所述环境光数据集合存在不能满足所述预设光强阈值的数据时,则触发测定保护机制;步骤s440:通过所述测定保护机制对超光强位置进行弱化光处理。
22.具体而言,在通过深度相机进行监测传送带的深度信息采集之前,通过光测定装置对深度采样位置进行环境光数据采集,获得环境光数据集合。进一步,对环境光数据集合是否满足预设光强阈值进行判断,如果环境光数据集合存在不能满足预设光强阈值的数据时,触发测定保护机制,并根据测定保护机制对超光强位置进行弱化光处理。其中,所述光
测定装置可以现有技术中的光传感器、测光仪。所述深度采样位置包括布设结果中的深度相机布设位置参数。所述环境光数据集合包括深度采样位置的实时光强参数。所述预设光强阈值包括预先设置确定的深度采样位置对应的实时光强阈值参数。所述测定保护机制包括增加遮光罩、调整深度相机的感光度及光圈、使用反光板等弱化光处理方法。所述超光强位置包括环境光数据集合中不能满足预设光强阈值的数据对应的深度采样位置。达到了通过对环境光数据集合是否满足预设光强阈值进行判断,适应性地对超光强位置进行弱化光处理,从而提高对监测传送带进行深度信息采集的准确性、抗干扰性的技术效果。
23.进一步的,本技术步骤s400还包括:步骤s450:根据采集信息获得光脉冲持续时间、第一快门收集电荷、第二快门收集电荷;步骤s460:通过公式计算深度距离,计算公式如下:其中,d为深度距离,c为光速,为光脉冲持续时间,为第一快门收集电荷,为第二快门收集电荷;步骤s470:通过所述深度距离获得所述深度点云数据。
24.具体而言,基于拍摄图像关联关系,通过深度相机对监测传送带在空载、满载不同场景下的画面进行扫描,获得采集信息。所述采集信息包括光脉冲持续时间、第一快门收集电荷、第二快门收集电荷,以及监测传送带在空载、满载不同场景下的图像信息。进一步,将光脉冲持续时间、第一快门收集电荷、第二快门收集电荷作为输入信息,输入深度距离计算公式,获得深度距离,继而确定深度点云数据。在深度距离计算公式中,d为输出的深度距离;c为已知光速;为输入的光脉冲持续时间;为输入的第一快门收集电荷,第一快门收集电荷包括较早的快门收集的电荷;为第二快门收集电荷,第二快门收集电荷包括延迟的快门收集的电荷。所述深度点云数据包括深度距离,以及深度相机到采集信息中的图像信息上所有点的横坐标x、纵坐标y。达到了通过深度相机对监测传送带进行深度信息采集,获得可靠的深度点云数据,从而提高后续获得的煤量百分比的准确性的技术效果。
25.步骤s500:基于所述深度点云数据计算获得煤量切面面积,并将所述煤量切面面积转化获得煤量百分比;进一步的,本技术步骤s500还包括:步骤s510:基于所述深度点云数据筛选获得空载点云和满载点云,通过所述空载点云和所述满载点云获得同一y轴坐标下的x轴坐标和对应z轴深度信息;步骤s520:对x轴坐标进行均值处理;步骤s530:根据面积计算公式进行满载煤量切面面积计算,计算公式如下:其中,s为满载煤量切面面积,为空载扇形面积,为满载扇形面积,为空
载扇形弧长,为满载扇形弧长,为空载x轴均值坐标,为满载x轴均值坐标;步骤s540:根据所述煤量切面面积和所述满载煤量切面面积的比值获得所述煤量百分比。
26.具体而言,对深度点云数据进行筛选,获得空载点云和满载点云,通过空载点云和满载点云,获得同一y轴坐标下的x轴坐标和对应z轴深度信息,并对x轴坐标进行均值处理。所述空载点云包括深度点云数据中,监测传送带在空载状态下的点云数据。所述满载点云包括深度点云数据中,监测传送带在满载状态下的点云数据。进一步,通过面积计算公式,获得满载煤量切面面积。通过深度点云数据计算获得煤量切面面积,并将煤量切面面积与满载煤量切面面积的比值输出为煤量百分比。其中,在面积计算公式中,s为输出的满载煤量切面面积,为输入的空载扇形面积,为输入的满载扇形面积,为输入的空载扇形弧长,为输入的满载扇形弧长,为输入的空载x轴均值坐标,为输入的满载x轴均值坐标。在获得煤量切面面积时,先对深度点云数据进行提取,获得深度点云数据对应的扇形弧长、x轴均值坐标,将扇形弧长、x轴均值坐标的乘积除以2,即可获得煤量切面面积。所述煤量百分比包括煤量切面面积与满载煤量切面面积的比值。达到了通过对深度点云数据进行计算,获得准确的煤量百分比,提高煤量识别的精准性的技术效果。
27.步骤s600:判断所述煤量百分比是否在所述煤量标识等级数据的区间内,当所述煤量百分比在所述煤量标识等级数据的区间内时,则输出所述煤量百分比。
28.具体而言,对煤量百分比是否在煤量标识等级数据的区间内进行判断,如果煤量百分比在煤量标识等级数据的区间内,对煤量百分比进行输出。达到了通过对煤量百分比是否在煤量标识等级数据的区间内进行判断,进一步提高煤量识别的质量的技术效果。
29.综上所述,本技术所提供的一种基于人工智能的煤量识别的方法具有如下技术效果:1.通过监测传送带的基础信息布设摄像头和深度相机,并根据布设结果构建拍摄图像关联关系;通过摄像头进行监测传送带的图像采集,获得采集图像;通过卷积神经网络对采集图像进行煤量识别,生成煤量标识等级数据;通过深度相机进行监测传送带的深度信息采集,获得深度点云数据;基于深度点云数据计算获得煤量切面面积,并将煤量切面面积转化为煤量百分比;判断煤量百分比是否在煤量标识等级数据的区间内,当煤量百分比在煤量标识等级数据的区间内时,则输出煤量百分比。达到了提高煤量识别的灵敏度、抗干扰性,实现智能化、精准性、高效化的煤量识别,提升煤量识别质量的技术效果。
30.2.通过卷积神经网络对采集图像进行煤量识别,获得可靠的煤量标识等级数据,提高煤量识别的灵敏度、精准性。
31.3.通过对环境光数据集合是否满足预设光强阈值进行判断,适应性地对超光强位置进行弱化光处理,从而提高对监测传送带进行深度信息采集的准确性、抗干扰性。
32.实施例二基于与前述实施例中一种基于人工智能的煤量识别的方法,同样发明构思,本发明还提供了一种基于人工智能的煤量识别的系统,所述系统与摄像头、深度相机通信连接,请参阅附图4,所述系统包括:关联关系构建模块11,所述关联关系构建模块11用于采集获得监测传送带的基础
信息,基于所述基础信息布设所述摄像头和所述深度相机,并根据布设结果构建拍摄图像关联关系;图像采集模块12,所述图像采集模块12用于通过所述摄像头进行所述监测传送带的图像采集,获得采集图像;煤量识别模块13,所述煤量识别模块13用于通过卷积神经网络对所述采集图像进行煤量识别,生成煤量标识等级数据;深度信息采集模块14,所述深度信息采集模块14用于基于拍摄图像关联关系通过所述深度相机进行所述监测传送带的深度信息采集,获得深度点云数据;煤量转化模块15,所述煤量转化模块15用于基于所述深度点云数据计算获得煤量切面面积,并将所述煤量切面面积转化获得煤量百分比;煤量输出模块16,所述煤量输出模块16用于判断所述煤量百分比是否在所述煤量标识等级数据的区间内,当所述煤量百分比在所述煤量标识等级数据的区间内时,则输出所述煤量百分比。
33.进一步的,所述系统还包括:第一执行模块,所述第一执行模块用于根据采集信息获得光脉冲持续时间、第一快门收集电荷、第二快门收集电荷;深度距离计算模块,所述深度距离计算模块用于通过公式计算深度距离,计算公式如下:其中,d为深度距离,c为光速,为光脉冲持续时间,为第一快门收集电荷,为第二快门收集电荷;深度点云数据确定模块,所述深度点云数据确定模块用于通过所述深度距离获得所述深度点云数据。
34.进一步的,所述系统还包括:数据筛选模块,所述数据筛选模块用于基于所述深度点云数据筛选获得空载点云和满载点云,通过所述空载点云和所述满载点云获得同一y轴坐标下的x轴坐标和对应z轴深度信息;均值处理模块,所述均值处理模块用于对x轴坐标进行均值处理;面积计算模块,所述面积计算模块用于根据面积计算公式进行满载煤量切面面积计算,计算公式如下:其中,s为满载煤量切面面积,为空载扇形面积,为满载扇形面积,为空载扇形弧长,为满载扇形弧长,为空载x轴均值坐标,为满载x轴均值坐标;煤量百分比确定模块,所述煤量百分比确定模块用于根据所述煤量切面面积和所
述满载煤量切面面积的比值获得所述煤量百分比。
35.进一步的,所述系统还包括:环境光数据采集模块,所述环境光数据采集模块用于通过所述光测定装置进行深度采样位置的环境光数据采集,获得环境光数据集合;光强阈值判断模块,所述光强阈值判断模块用于判断所述环境光数据集合是否满足预设光强阈值;保护机制触发模块,所述保护机制触发模块用于当所述环境光数据集合存在不能满足所述预设光强阈值的数据时,则触发测定保护机制;弱化光处理模块,所述弱化光处理模块用于通过所述测定保护机制对超光强位置进行弱化光处理。
36.进一步的,所述系统还包括:视频采集模块,所述视频采集模块用于通过所述摄像头进行所述监测传送带的视频采集,获得视频数据;视频数据切分模块,所述视频数据切分模块用于将所述视频数据切分成帧图片;图像标注模块,所述图像标注模块用于基于标注平台进行所述帧图片的全部图像标注,且标注结果包括多个煤量等级;第二执行模块,所述第二执行模块用于对标注后的帧图片进行尺寸和灰度处理,并划分为训练集和验证集;第三执行模块,所述第三执行模块用于基于所述训练集和所述验证集构建所述卷积神经网络。
37.其中,所述卷积神经网络包括图像输入层、卷积层、光栅化、多层感知器,且所述卷积神经网络通过mxnet深度学习框架进行模型训练。
38.进一步的,所述系统还包括:网络参数采集模块,所述网络参数采集模块用于采集获得所述卷积神经网络的精确率参数和召回率参数;调和均值获得模块,所述调和均值获得模块用于获得的所述精确率参数和召回率参数的调和均值;第四执行模块,所述第四执行模块用于当所述调和均值满足预设阈值时,则完成所述卷积神经网络的训练。
39.本发明实施例所提供的一种基于人工智能的煤量识别的系统可执行本发明任意实施例所提供的一种基于人工智能的煤量识别的方法,具备执行方法相应的功能模块和有益效果。
40.所包括的各个模块只是按照功能逻辑进行划分的,但并不局限于上述的划分,只要能够实现相应的功能即可;另外,各功能模块的具体名称也只是为了便于相互区分,并不用于限制本发明的保护范围。
41.本技术提供了一种基于人工智能的煤量识别的方法,其中,所述方法应用于一种基于人工智能的煤量识别的系统,所述方法包括:通过监测传送带的基础信息布设摄像头和深度相机,并根据布设结果构建拍摄图像关联关系;通过摄像头进行监测传送带的图像采集,获得采集图像;通过卷积神经网络对采集图像进行煤量识别,生成煤量标识等级数
据;通过深度相机进行监测传送带的深度信息采集,获得深度点云数据;基于深度点云数据计算获得煤量切面面积,并将煤量切面面积转化为煤量百分比;判断煤量百分比是否在煤量标识等级数据的区间内,当煤量百分比在煤量标识等级数据的区间内时,则输出煤量百分比。解决了现有技术中针对煤量识别的灵敏度低、抗干扰性差,进而造成煤量识别效果不佳的技术问题。达到了提高煤量识别的灵敏度、抗干扰性,实现智能化、精准性、高效化的煤量识别,提升煤量识别质量的技术效果。
42.注意,上述仅为本发明的较佳实施例及所运用技术原理。本领域技术人员会理解,本发明不限于这里所述的特定实施例,对本领域技术人员来说能够进行各种明显的变化、重新调整和替代而不会脱离本发明的保护范围。因此,虽然通过以上实施例对本发明进行了较为详细的说明,但是本发明不仅仅限于以上实施例,在不脱离本发明构思的情况下,还可以包括更多其他等效实施例,而本发明的范围由所附的权利要求范围决定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1