图像与模型的配准方法及相关产品与流程
本技术涉及医疗影像处理,尤其涉及一种图像与模型的配准方法及相关产品。
背景技术:
1、在医学领域,基于目标器官的三维模型进行辅助诊断,可提升医生进行诊断的效率,如基于目标器官的三维模型进行穿刺手术。但由于目标器官的三维模型通常是在穿刺手术前采集得到的,三维模型中的目标器官的位姿相较于目标器官在穿刺手术的过程中的位姿存在偏差,即三维模型中的目标器官的位姿存在误差,而该误差的存在显然会导致穿刺手术的效果下降,因此如何确定三维模型中的目标器官的位姿的误差具有非常重要的意义。
技术实现思路
1、本技术提供一种图像与模型的配准方法及相关产品。
2、第一方面,提供了一种图像与模型的配准方法,所述方法包括:
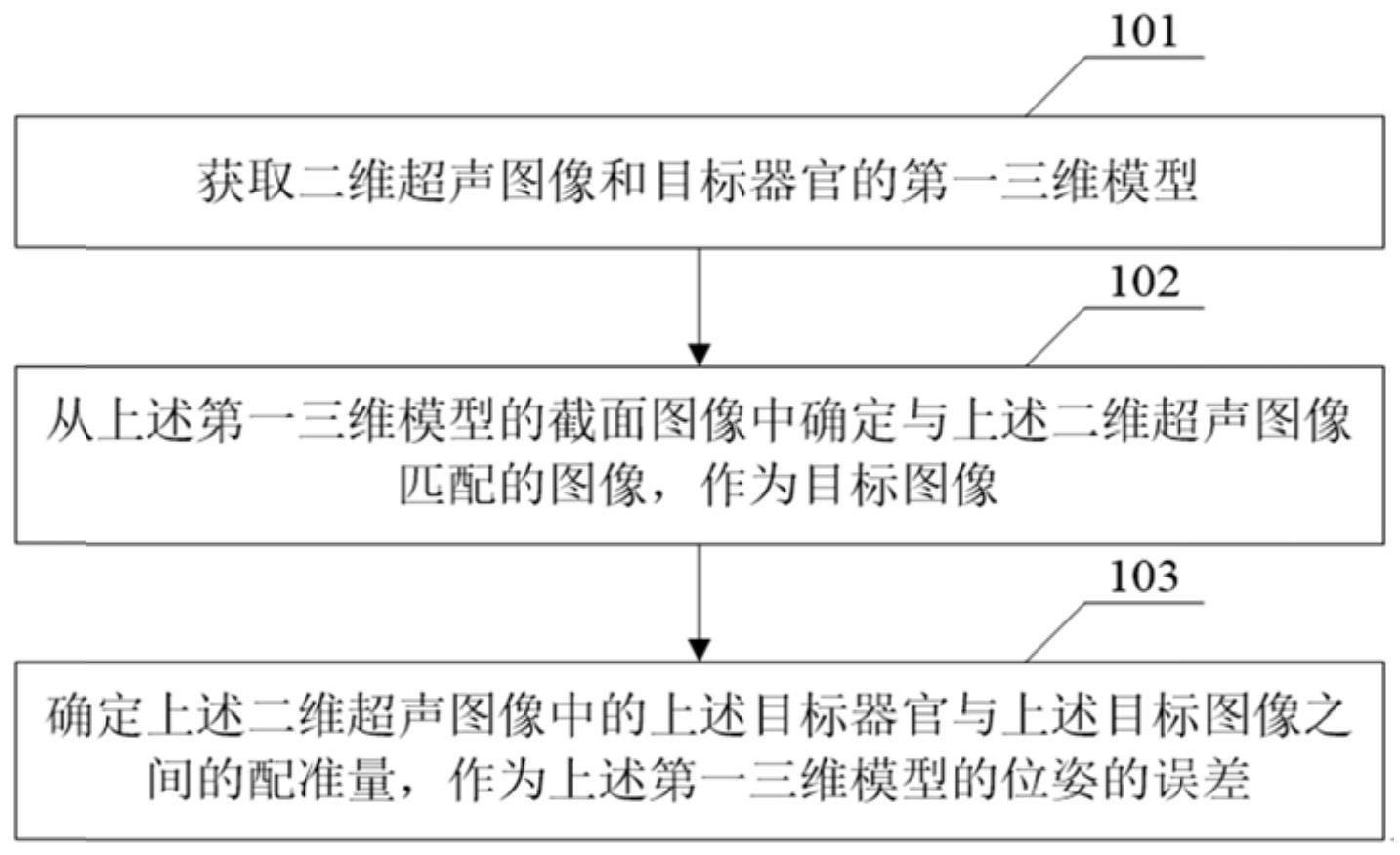
3、获取二维超声图像和目标器官的第一三维模型,所述二维超声图像包括所述目标器官;
4、从所述第一三维模型的截面图像中确定与所述二维超声图像匹配的图像,作为目标图像;
5、确定所述二维超声图像中的所述目标器官与所述目标图像之间的配准量,作为所述第一三维模型的位姿的误差,通过所述配准量可将所述二维超声图像中的所述目标器官与所述目标图像配准。
6、结合本技术任一实施方式,所述从所述第一三维模型的截面图像中确定与所述二维超声图像匹配的图像,作为目标图像,包括:
7、通过对所述二维超声图像进行分割处理,从所述二维超声图像中截取所述目标器官所覆盖的像素区域,作为目标器官图像;
8、从所述第一三维模型的截面图像中确定与所述目标器官图像匹配的图像,作为所述目标图像。
9、结合本技术任一实施方式,在所述从所述第一三维模型的截面图像中确定与所述目标器官图像匹配的图像,作为所述目标图像之前,所述方法还包括:
10、获取目标转换关系,所述目标转换关系为所述二维超声图像的第一像素坐标系与所述第一三维模型的第二像素坐标系的转换关系;
11、所述从所述第一三维模型的截面图像中确定与所述目标器官图像匹配的图像,作为所述目标图像,包括:
12、利用所述目标转换关系对所述目标器官图像在所述二维超声图像中的位置进行转换,得到所述目标器官在所述第二像素坐标系下的待矫正位置;
13、从所述第一三维模型的截面图像中确定位置为所述待矫正位置的图像,作为参考图像;
14、以所述参考图像为起始位置,按到所述起始位置的距离从小到大的顺序,依次对所述第一三维模型的截面图像进行遍历,确定与所述目标器官图像匹配的图像,作为所述目标图像。
15、结合本技术任一实施方式,所述以所述参考图像为起始位置,按到所述起始位置的距离从小到大的顺序,依次对所述第一三维模型的截面图像进行遍历,确定与所述目标器官图像匹配的图像,作为所述目标图像,包括:
16、获取基于所述参考图像的位置构建的待遍历位置范围;
17、从所述第一三维模型的截面图像中确定处于所述待遍历位置范围内的待遍历图像;
18、以所述参考图像为起始位置,按到所述起始位置的距离从小到大的顺序,依次对所述待遍历图像进行遍历,确定与所述目标器官图像匹配的图像,作为所述目标图像。
19、结合本技术任一实施方式,所述目标器官属于目标人物,所述目标器官随所述目标人物的呼吸而产生跟随运动,所述目标器官或随所述目标人物的心跳而产生所述跟随运动,所述跟随运动的运动范围为目标范围;
20、所述获取基于所述参考图像的位置构建的待遍历位置范围,包括:
21、根据所述参考图像的位置和所述目标范围,得到所述待遍历位置范围。
22、结合本技术任一实施方式,所述确定与所述目标器官图像匹配的图像,作为所述目标图像,包括:
23、确定与所述目标器官图像最相似的图像,作为所述目标图像。
24、结合本技术任一实施方式,所述获取目标器官的第一三维模型,包括:
25、获取所述目标器官的三维电子计算机断层扫描(computed tomography,ct)模型和所述目标器官的三维超声图像,所述三维超声图像和所述三维ct模型均在针对所述目标器官的穿刺手术之前采集,所述二维超声图像在进行所述穿刺手术的过程中采集得到;
26、在所述三维超声图像与所述三维ct模型已配准的情况下,将所述三维ct模型、所述三维超声图像中的一个,作为所述第一三维模型。
27、结合本技术任一实施方式,在所述确定所述二维超声图像中的所述目标器官与所述目标图像之间的配准量,作为所述第一三维模型的位姿的误差之后,所述方法还包括:
28、根据所述误差,对所述第一三维模型的位姿进行矫正,得到第二三维模型。
29、第二方面,提供了一种图像与模型的配准装置,其特征在于,所述配准装置包括:
30、获取单元,用于获取二维超声图像和目标器官的第一三维模型,所述二维超声图像包括所述目标器官;
31、第一确定单元,用于从所述第一三维模型的截面图像中确定与所述二维超声图像匹配的图像,作为目标图像;
32、第二确定单元,用于确定所述二维超声图像中的所述目标器官与所述目标图像之间的配准量,作为所述第一三维模型的位姿的误差,通过所述配准量可将所述二维超声图像中的所述目标器官与所述目标图像配准。
33、结合本技术任一实施方式,所述第一确定单元,用于:
34、通过对所述二维超声图像进行分割处理,从所述二维超声图像中截取所述目标器官所覆盖的像素区域,作为目标器官图像;
35、从所述第一三维模型的截面图像中确定与所述目标器官图像匹配的图像,作为所述目标图像。
36、结合本技术任一实施方式,所述获取单元,还用于:
37、获取目标转换关系,所述目标转换关系为所述二维超声图像的第一像素坐标系与所述第一三维模型的第二像素坐标系的转换关系;
38、所述第一确定单元,用于:
39、利用所述目标转换关系对所述目标器官图像在所述二维超声图像中的位置进行转换,得到所述目标器官在所述第二像素坐标系下的待矫正位置;
40、从所述第一三维模型的截面图像中确定位置为所述待矫正位置的图像,作为参考图像;
41、以所述参考图像为起始位置,按到所述起始位置的距离从小到大的顺序,依次对所述第一三维模型的截面图像进行遍历,确定与所述目标器官图像匹配的图像,作为所述目标图像。
42、结合本技术任一实施方式,所述第一确定单元,用于:
43、获取基于所述参考图像的位置构建的待遍历位置范围;
44、从所述第一三维模型的截面图像中确定处于所述待遍历位置范围内的待遍历图像;
45、以所述参考图像为起始位置,按到所述起始位置的距离从小到大的顺序,依次对所述待遍历图像进行遍历,确定与所述目标器官图像匹配的图像,作为所述目标图像。
46、结合本技术任一实施方式,所述目标器官属于目标人物,所述目标器官随所述目标人物的呼吸而产生跟随运动,所述目标器官或随所述目标人物的心跳而产生所述跟随运动,所述跟随运动的运动范围为目标范围;
47、所述获取单元,用于:
48、根据所述参考图像的位置和所述目标范围,得到所述待遍历位置范围。
49、结合本技术任一实施方式,所述第一确定单元,用于:
50、确定与所述目标器官图像最相似的图像,作为所述目标图像。
51、结合本技术任一实施方式,所述获取单元,用于:
52、获取所述目标器官的三维ct模型和所述目标器官的三维超声图像,所述三维超声图像和所述三维ct模型均在针对所述目标器官的穿刺手术之前采集,所述二维超声图像在进行所述穿刺手术的过程中采集得到;
53、在所述三维超声图像与所述三维ct模型已配准的情况下,将所述三维ct模型、所述三维超声图像中的一个,作为所述第一三维模型。
54、结合本技术任一实施方式,所述配准装置,还包括:矫正单元,用于根据所述误差,对所述第一三维模型的位姿进行矫正,得到第二三维模型。
55、第三方面,提供了一种电子设备,其特征在于,包括:处理器和存储器,所述存储器用于存储计算机程序代码,所述计算机程序代码包括计算机指令,在所述处理器执行所述计算机指令的情况下,所述电子设备执行如上述第一方面及其任意一种可能实现的方式的方法。
56、第四方面,提供了另一种电子设备,包括:处理器、发送装置、输入装置、输出装置和存储器,所述存储器用于存储计算机程序代码,所述计算机程序代码包括计算机指令,在所述处理器执行所述计算机指令的情况下,所述电子设备执行如上述第一方面及其任意一种可能实现的方式的方法。
57、第五方面,提供了一种计算机可读存储介质,所述计算机可读存储介质中存储有计算机程序,所述计算机程序包括程序指令,在所述程序指令被处理器执行的情况下,使所述处理器执行如上述第一方面及其任意一种可能实现的方式的方法。
58、第六方面,提供了一种计算机程序产品,所述计算机程序产品包括计算机程序或指令,在所述计算机程序或指令在计算机上运行的情况下,使得所述计算机执行上述第一方面及其任一种可能的实现方式的方法。
59、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,而非限制本技术。
60、本技术实施例中,图像与模型的配准装置在获取包括目标器官的二维超声图像和目标器官的第一三维模型的情况下,从第一三维模型的截面图像中确定与二维超声图像匹配的目标图像。最后通过确定二维超声图像的目标器官与目标图像之间的配准量,可得到第一三维模型的位置的误差。
- 还没有人留言评论。精彩留言会获得点赞!